基于中值滤波和小波变换的混合滤波方法在推进剂监测中的应用
2020-07-27王治宇徐伯起
王治宇,徐伯起
(海军航空大学,山东烟台264001)
我国导弹、卫星动力系统使用的液体推进剂主要是肼类燃料和硝基氧化剂[1]。两者均属于易燃、易爆、易挥发的高毒物质,在自然贮存条件下,由于自然灾害、设备故障、人为操作等因素引发泄漏事故[2],进而造成燃烧、爆炸,导致重大的安全事故[3]。
目前安装的毒气监测报警仪器是通过设定阈值来进行监测报警[4],在信号处理方面缺乏进一步的研究。传感器精度不断提升之时,其对外界环境的微小变化也更加敏感,原来不易显现的噪声也会被传感器监测到,放大的噪声会进一步抑制有效信号。监测系统中,设有多个传感器同时工作。考虑到传感器性能各异和布置位置不同,传回的多组信号存在差异,如果此时某一传感器出现故障,传统报警系统难以判断。由此,需要一种有效的信号处理方法,以提高采集信号的可信度,杜绝误报警和不报警的情况,确保导弹带液贮存期间的安全稳定。
处理信号的方法有滤波、预测和平滑。3 种方法都能从原始信号中分辨出有用信号和噪声信号,但采取的方式不同。一般根据信号的状态量与观测量之间的关系,对3种方法进行区分:滤波主要是依据之前的信号特点与变化趋势对现在采集到的信号进行估计,一般用于对信号进行实时处理;预测则是利用之前的信号对未来信号中可能出现的变化进行估计,其主要目的是提前预知信号可能出现的变化形式,也可用于对多源信息的融合估计;平滑是利用信号的变化趋势和关键节点对现有信号的优化。滤波和平滑适用于本文研究的信号去噪,预测适用于本文研究的故障排查。
1 推进剂检测信号分析
1.1 传感器信号分析
由图1 可以看出,仿真的信号主要由噪声信号和传感器根据毒气浓度变化转化的信号构成。

图1 信号仿真流程Fig.1 Signal simulation process
传感器采集的信号中不可避免掺杂各种噪声信号,这样的噪声一般来自3个方面:通电后带电粒子发生随机运动,使传出信号抖动,这类噪声称为高斯白噪声;在各类电子元件组成的电路中,电流通过电子器件时,元件阻值引起电路局部过热,影响电子器件性能,这个过程产生的噪声称为热噪声(属于高斯白噪声);在传送敏感元件采集的信息时,由于电路环境中的不确定因素,使得在最后传出的信号中出现快速、剧烈的异常变化,这类噪声称为脉冲噪声[5]。
传感器采集的信号大多没有泄漏发生时的平稳信号,体现为在某一基准值附近小幅度抖动,信号曲线较为光滑。如泄漏发生,抖动幅度将随浓度增加而变大,信号将出现剧烈变化,正是泄露导致的未知变化形式会使传统的阈值报警模式失效。本文基于常见泄漏信号的基本特点,合理假设可能出现的各种信号形式,利用简单函数,构造出突发情况下出现的无规律剧烈波峰抖动、周期性起伏和渐变抖动等噪声形式,为仿真信号的变化形式提供参考。
1.2 仿真信号
仿真信号为6 h 的不间断连续监测状态下传出信号,图2 为单个传感器仿真信号。传感器传出基准值设置为0.000 15%,由于存在10 dB 的噪声影响,信号在基准值上下抖动,幅值为0.000 15%。泄漏是发生在开始采集后1 h,经过1 h 积累,推进剂监测浓度由基准值,按先慢后快的速度增长到0.000 5%,信号变化形式为线性增长型。假设此时管理人员注意到了这个问题,关闭弹库换气系统,进一步观察传感器传出数值,发现随后的0.5 h 内,数值继续增长,且信号出现波动,不稳定因素增加,信号变化形式为指数增长型。监测人员发现疑似泄漏发生的情况,果断采取处置措施,对弹库进行气体过滤排出,同时检查泄漏原因,对传感器附近位置进行故障排查,发现由于阀门松动,出现泄漏,并进行相应应急处理,推进剂浓度迅速下降,在距开始监测2 h 40 min 后,传感器检测值恢复基准值。但由于应急处理失效,在距开始监测3 h 20 min 后,推进剂又开始出现缓慢泄漏,弹库换气系统影响使得泄漏监测传感器传出信号不稳定,加之泄漏速率较小,使得信号呈现缓慢抖动增长,信号变化形式为抖动增长型。由于没有采用有效的滤波方案,信号中的噪声严重影响工作人员对信号的变化趋势的分析,工作人员没有及时发觉这一情况发生,使得毒气浓度达到报警阈值0.001%。

图2 单个传感器仿真信号Fig.2 Single sensor simulation signal
综上分析,利用线性增长型和指数增长型2 种基本信号完成第1 次泄漏发生时的信号仿真,利用抖动增长型的基本信号完成第2 次泄漏发生时的信号仿真。
2 混合滤波方案设计
考虑仿真信号中存在高斯白噪声、脉冲噪声和周期性起伏等形式,本文采用中值滤波和小波滤波2 种方法进行处理。
2.1 中值滤波
中值滤波须要将选定节点的领域内的各个节点按照大到小或小到大的顺序组成数字序列,经过筛选,选取中间值输出。中值滤波是基于原信号中的数值进行处理,没有产生新的值,所以更好地保留了原始信号的特性[6]。中值滤波滤波效果与滑动窗口长度关系密切,通过设置多组长度选值,分析滤波质量。图3显示了滤波后信号的信噪比和均方根误差随窗口长度的关系。

图3 滑动窗口长度对中值滤波效果影响Fig.3 Effect of sliding window length on median filtering effect
可以看出,当滑动窗口从5增加到120的过程中,信噪比随着窗口增长也一直增长,表明窗口增加能有效抑制噪声的能量;观察均方根误差这一指标,又能发现,其值随窗口的增加出现先减小后增加的变化趋势,其中滑动窗口为20时,均方根误差最小为0.88。
在PHC管桩空芯内靠近桩端处安装用2根钢筋做成的十字交叉钢箍,十字交叉钢箍与PHC管桩钢筋笼绑扎牢固,把铠装光缆绑扎到十字交叉钢箍上.铠装光缆在引出桩身内壁的地方弯折过大时,加设强度较高的不锈钢管进行保护.
2.2 小波阈值滤波
小波分析[7-9]可以同时分析信号的时域特性和频域特性,在进行小波变换后,信号中噪声信号与有用信号因为时频域特性不同而得到不同的小波系数,从而根据小波系数来辨别出信号中的噪声部分,实现滤波处理[10]。具体过程如图4所示。
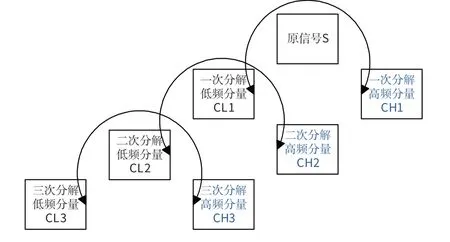
图4 小波系数分解层次Fig.4 Wavelet coefficient decomposition hierarchy
图4中,信号共经历3次分解,每次分解为高频和低频2部分,最后得到4部分信号,即CL3、CH1、CH2、CH3。当噪声具有高频特性时,通过多次小波分解就可将噪声锁定在分解后得到的高频分量中,随后处理高频分量的小波系数,实现滤波。
综合考虑小波阈值滤波中的小波母函数、阈值选取、阈值计算和分解尺度的问题[11],设计多组对比实验,使用信噪比(Signal-Noise Ratio,SNR)和均方根误差(Root-Mean-Square Error,RMSE)[12]这2个指标来评定消噪性能,最终得到表1所示的最佳小波参数取值。

表1 最佳小波阈值滤波参数Tab.1 Optimal wavelet threshold filter parameters
2.3 混合滤波
小波阈值滤波处理后的信号可以看作是对原信号的最优估计[13],对于常见的传感器传出信号都可以采取这种滤波方式,本文主要利用其消除仿真信号中的高斯白噪声,而对仿真信号中出现脉冲噪声和周期性起伏,小波阈值滤波难以将其与有用信号进行区分,造成滤波处理后噪声依旧残余的问题。
为了解决上述问题,本文参阅了小波阈值滤波和中值滤波在信号处理中的应用[14-17],提出了结合中值滤波和小波阈值滤波的混合滤波方案,以实现还原信号原有趋势和去除所有噪声的目的,滤波流程图[18]如图5所示。

图5 混合滤波方案流程Fig.5 Flow of hybrid filter scheme
将之前谈论的3种最佳小波阈值滤波与中值滤波方案相组合,得到了3个混合方案:
1)滑动窗口长度为20的中值滤波与db10小波阈值滤波混合;
2)滑动窗口长度为20的中值滤波与coif5小波阈值滤波混合;
3)滑动窗口长度为20的中值滤波与sym5小波阈值滤波混合。
3 信号仿真及分析
3.1 最佳混合方案
利用混合滤波方案对仿真信号进行了滤波处理。表2列出了3种混合滤波方案的信噪比和均方根误差数值。
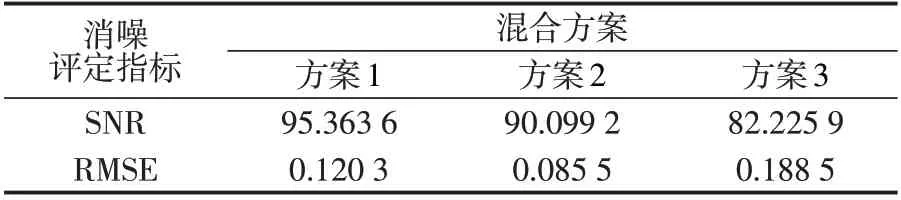
表2 3种混合滤波方案的滤波效果Tab.2 Filtering effect of three hybrid filters
为了使滤波后信号与原始信号间误差最小,同时保证信噪比尽可能较高,综合分析后可看出,方案2滤波后信号的信噪比虽没有方案1 高,但信号的均方根误差值最小,信号还原度高,所以决定采用方案2为最佳滤波方案。
3.2 方案优化
考虑到平滑处理方法可以使信号更光滑,决定对混合滤波方案滤波后信号进行平滑处理,以求进一步提高信噪比。图6显示了滤波后信号经过多次平滑处理后的信噪比和均方根误差。
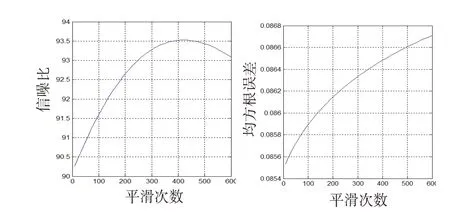
图6 混合滤波方案2平滑处理效果Fig.6 Smoothing effect of hybrid filter scheme 2
观察图6可知,随平滑次数增加,信号性噪比先增长后减小。同时,信号的均方根误差变化不大,特别是平滑处理420 次后,信号信噪比达到峰值,为93.524 6,同时均方根误差为0.086 5。
3.3 对比分析
为了更好验证混合滤波方案对信号的处理效果,本文利用单一滤波方法设置对照试验。其中,小波阈值滤波采用了之前分析的3 种最佳滤波方案,中值滤波选取滑动窗口长度为20,平滑处理采用420 次。图7展现了不同方法滤波后的信号,表3列出了每种方法的滤波效果。
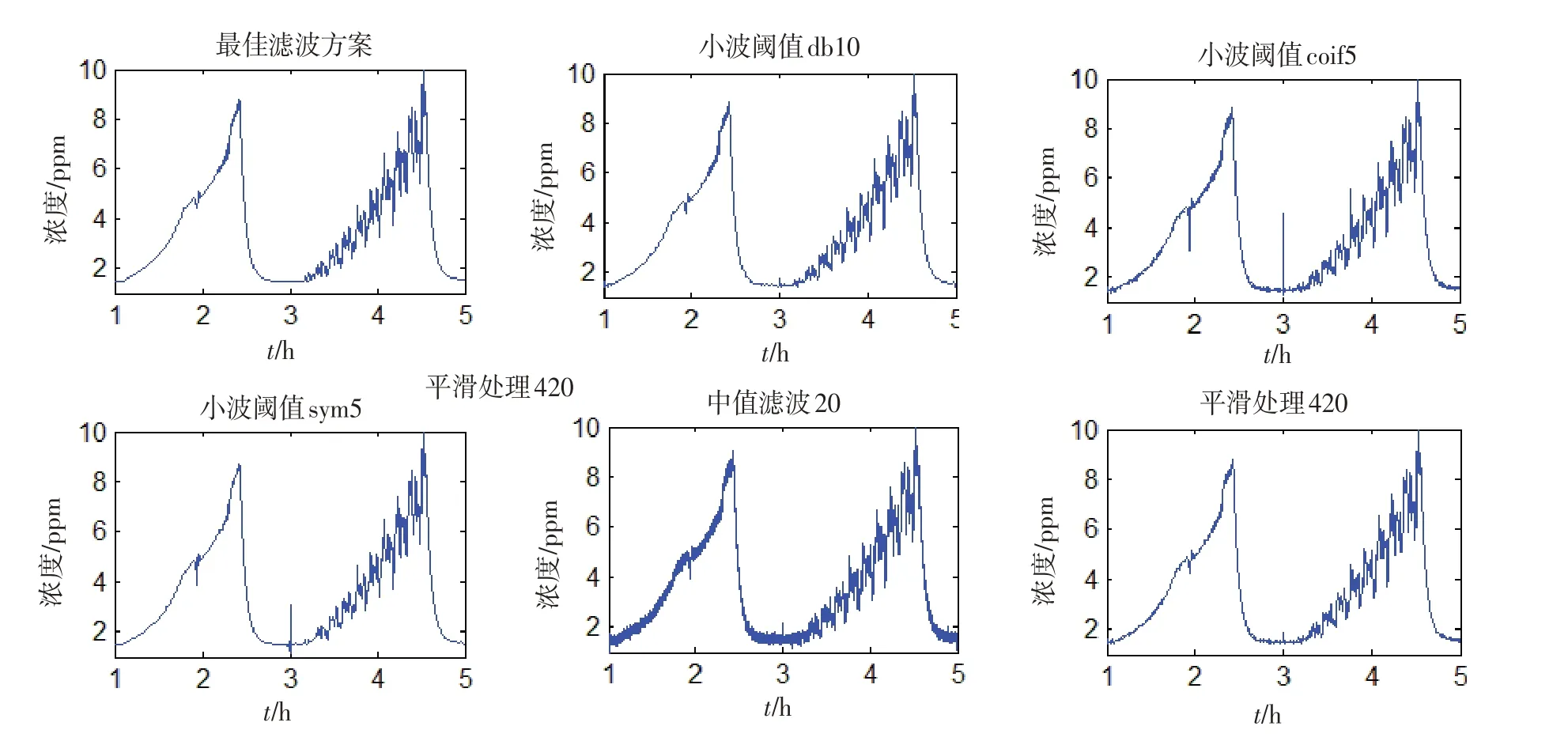
图7 不同滤波方法滤波后信号Fig.7 Filtering signals with different filtering methods

表3 不同方法的滤波效果Tab.3 Filtering effect of different methods
分析图7 和表3 的滤波结果看出,最佳滤波方案处理后的信号能够保证较高信噪比。同时,信号的均方根误差最小,使滤波后信号与原信号间的差距很小的情况下保证信号原有趋势,信号得到有效还原。
4 结论
本文基于实际监测中可能出现的突发情况,设计了一系列滤波算法,完成了对仿真信号的滤波处理,最终得到了滑动窗口长度为20的中值滤波与coif5作为小波基时,采用硬阈值法和自适应式阈值计算规则,分解尺度为8 的小波阈值滤波相结合的混合滤波方案,该方案处理的信号信噪比为93.524 6,均方根误差为0.086 5,保证了信号高信噪比、低均方根误差的条件,提高了监测系统的可靠性。