基于欧拉法的自寻的炮射导弹弹道建模与仿真
2020-07-27赵河明杨晋伟
白 卓,赵河明,杨晋伟
(1.中北大学机电工程学院,太原030051;2.淮海工业集团,山西长治046012)
常规武器发射平台在使用和维护不变的情况下,遇到要求精确打击时,可直接使用制导弹药。这种扩展使常规武器兼备了常规武器的传统功能及过去只有制导武器才具有的精确打击功能。从20 世纪的几次局部战争来看,精确制导武器在现代战争中起着决定性的作用。据有关资料统计,过去平均使用250 发155 mm 的常规弹药,只可能击毁一辆坦克,现在使用精确制导技术的炮弹仅需1~2 发即可,其效能提高了125~259倍。现在世界各国都在争相研制的炮射导弹就是一种精确制导武器[1-7]。装有精确制导系统的炮射导弹的出现使现代火炮进入了一个新的时代,实现了弹炮集合,由无控向有控的转变[8]。相对于机载导弹,炮射导弹目前还有很大的发展潜力,特别是炮射自寻的防空导弹技术,使坦克拥有抗衡武装直升机,甚至攻击机的“撒手锏”[9]。
大多数炮射导弹采用直瞄攻击模式,不仅耗时长,而且精确度与毁伤无法达到预想效果。目前,西方国家制导弹药多采用制导体制,自寻的模式代表着制导弹药的发展方向。
1 炮射导弹系统数学模型
由理论力学可知,导弹运动在每一瞬时,把导弹当作一个质量不变的,在气动力、推力、操纵力等作用下运动的刚体来处理[9]。
通过这些假定,来研究导弹质心的移动。并且,在利用质心运动的动量定理时,应将弹道坐标系作为动坐标系,这样会使方程式简单明了,更便于编写程序,求解方程组。
1.1 导弹的受力分析
导弹在地球周围大气里飞行,会受到重力、空气动力和发动机推力的共同作用。在导弹上的重力为地心引力和离心惯性力的矢量和。

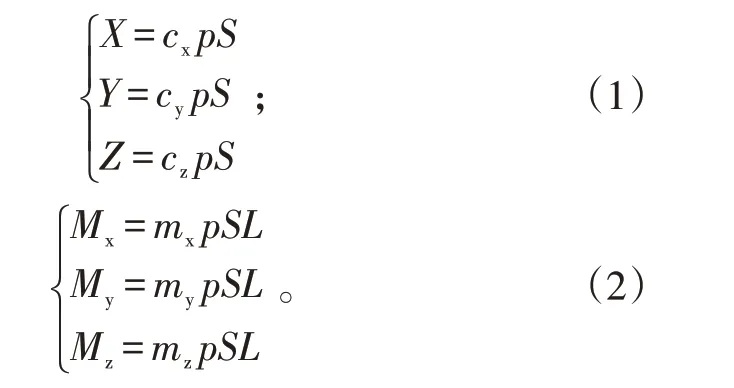
式(1)、(2)中:cx、cy、cz分别为阻力系数、升力系数和侧向力系数;mx、my、mz分别称为滚动力矩系数、偏航力矩系数和俯仰力矩系数;L为特征长度;S为特征面积。
发动机推力是由发动机内的燃气流以高速喷射出而产生的反作用力。
1.2 导弹数学模型建立
本文的弹道设计为方案飞行弹道,末端采用比例导引法制导,实现炮射导弹的“自寻的”。导弹的飞行路线设计:炮口发射→无控阶段→程序爬升阶段→平飞阶段→比例导引段毁伤目标。图1为导弹和目标的运动学几何关系。
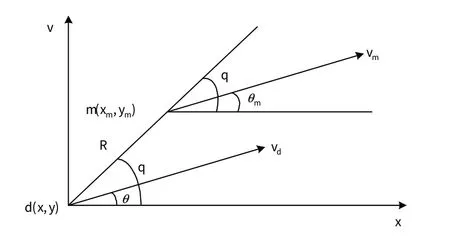
图1 导弹和目标的运动学几何关系Fig.1 The kinematic geometry relationshipbetween missile and target
1)无控升段。在无控弹道段为自由飞行,忽略其他干扰,只考虑重力和气动力的作用。
2)程序爬升阶段。对于程序爬升段,目的是提升弹道高度,增加射程和为实现大落脚准备。对于爬升段的方案飞行,考虑到技术上的可行性,实现的难易程度以及精确性,本文采用给定俯仰角变化规律ϑ∗(t)的飞行方案。这段时间内,发动机开始工作,相比于无控段的弹道方程组,爬升段要引入一个新的变量mc(质量秒流量)。
3)平飞阶段。导弹在平飞段不会进行大的机动飞行(速度、高度恒定),并且在飞行期间弹道倾角不会改变。对于平飞阶段,常采用超低空飞行或大高度飞行,以避开敌人雷达侦查和防空火力的射击。


式(3)中:v为导弹的速度;P为发动机推力;X为轴向力;g为重力加速度;θ为弹道倾角;ωz为俯仰角角速度;Mz为静俯仰力矩;Jz为赤道转动惯量;-mc为质量流量;ϑ为俯仰角;α为平衡攻角。
导弹—目标相对位置:

导弹—目标相对速度:

导弹—目标相对距离:

导弹—目标视线角速度:

导弹—目标相对距离变化率:

2 弹道方程数值解法
弹道方程组是一阶变系数联立方程组,只能用数值方法求得数值解,仅在一些特定条件下经过适当的简化才能求得近似解析解。
本节通过对比龙格—库塔法(Runge—Kutta)、阿当姆斯法以及欧拉法,选出合适的方法求解弹道微分方程[13-16]。
2.1 龙格—库塔法
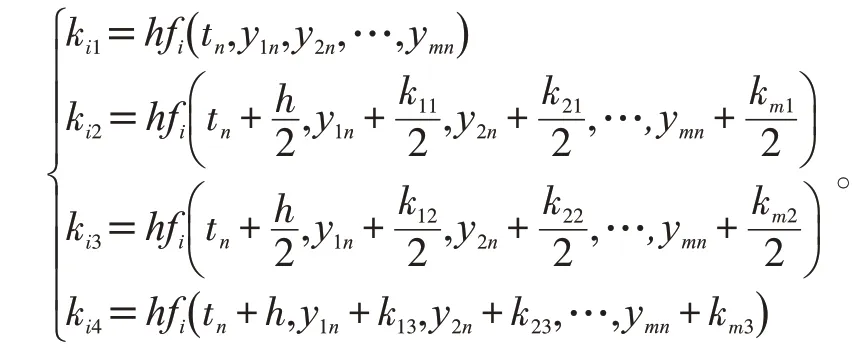
龙格—库塔法实质上是以函数y(x)的台劳级数为基础的一种改进方法。最常用的是4阶龙格—库塔法,若已知在点n处的值(tn,y1n,y2n,…,ymn) ,则求点n+1处的函数值的公式可由龙格—库塔公式推导出:

式(9)中:
2.2 阿当姆斯预报—校正法


2.3 欧拉法

3 自寻的炮射导弹弹道仿真
3.1 仿真方法
本文采用欧拉法来求解弹道方程组,在初始条件给定的情况下,程序可以得到以时间t为自变量的弹道上的任意诸元。对于刚体弹道方程,时间的步长h必须小于0.005 s。否则,计算发散。故在使用欧拉法求解弹道方程组时,选取0.001作为积分步长,既可便捷的求解弹道方程,又可满足误差要求。比例导引方法的比例系数K,应选择在1~∞的范围内,通常在2~6 的范围内选择。本文选择K=4。
采用Matlab 编写程序来实现自寻的炮射导弹的各段弹道,程序以时间t作为全局变量,将计算出的数值存储在数组中,便于以后作图[17-20]。
3.2 仿真结果及分析
仿真初始条件为:炮射导弹以初速度300 m/s 发射,初始攻角α=0°,初始俯仰角ϑ=18°,初始弹道的倾角θ=18°,得到仿真结果如图2所示。

图2 弹道曲线Fig.2 Ballistic curve
图2为自寻的炮射导弹的弹道曲线。从图2可以得出,导弹以初速300 m/s 发射,在发动机不工作的情况下爬升一段距离。此时,弹道倾角逐渐减小;随后,发动机开始工作,导弹在发动机的推动下爬升,爬升过程中随着弹道倾角的增加,爬升率下降;当t=22 s时,导弹爬升到最高点;然后,经历一段平飞,导弹迅速调整姿态,弹道倾角在平飞段为0,平飞段的目的为使导弹飞到目标上空,增加导弹射程;当弹目距离达到预定值之后,导弹加速下落,比例导引法击毁目标。
平衡攻角和俯仰角与弹道倾角之间存在着简单的几何关系:α=ϑ-θ。
如图3 所示,在导弹发射时,平衡攻角α=0°,平衡攻角α一直保持为0°,导弹保持平衡飞行,直至弹道转为比例导引段,导弹姿态调整,进入末端制导,实际攻角开始减小,其收敛于平衡攻角,导弹飞行稳定。显然,图示攻角一直保持为0,仅为理想状态下攻角曲线,实际的攻角曲线应如图4所示。
图4 所示为某无控弹道的攻角的仿真曲线,舵偏角δz=0°,与此对应的平衡攻角α也为0。导弹在飞行过程中攻角的变化会产生严重的振荡,因为弹体阻尼力矩的存在,攻角的变化会收敛于平衡攻角。
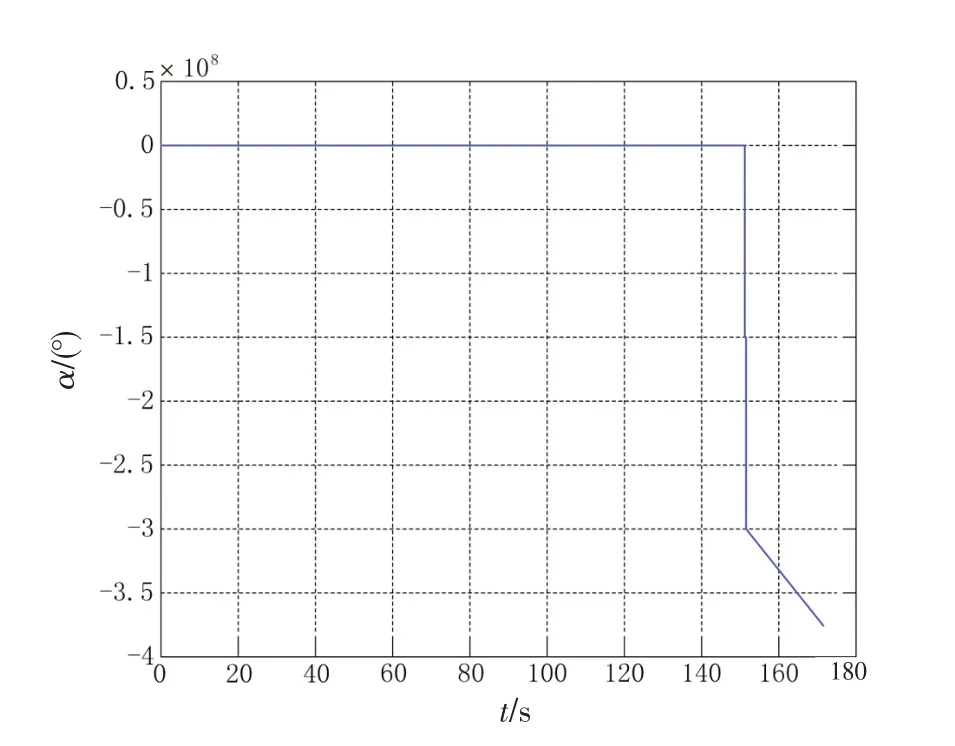
图3 平衡攻角-时间曲线Fig.3 Angle of attack-time curve
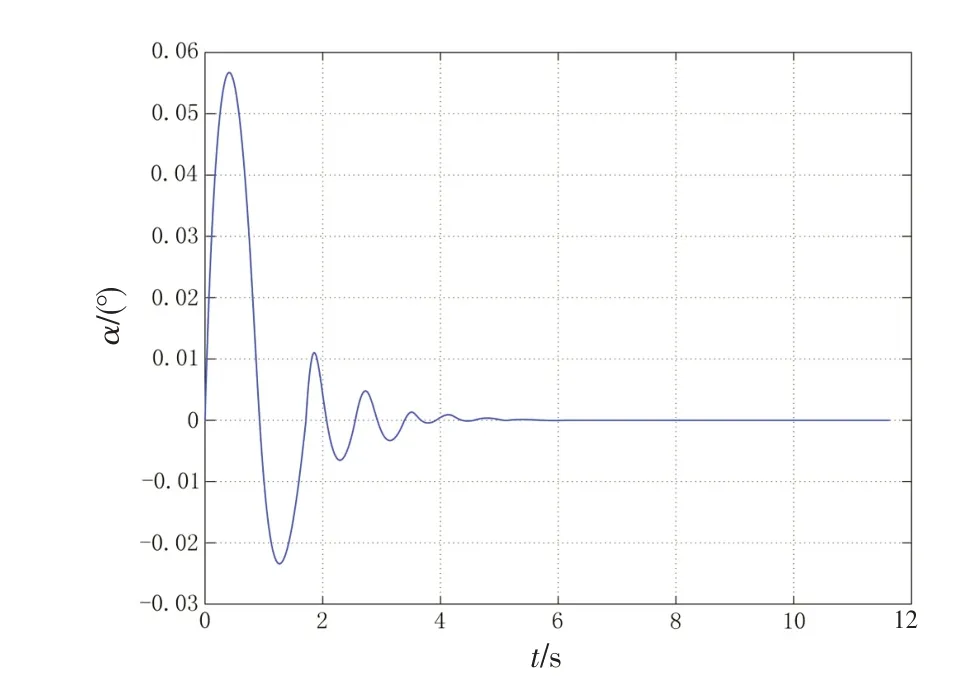
图4 平衡攻角-时间曲线Fig.4 Angle of attack-time curve
由图5 速度时间变化的曲线可以看出,速度曲线近似为3段折线。导弹经发射之后,在0~30 s,导弹在较高的切向加速度加速飞行;在30 s 之后,导弹到达预定飞行高度,速度保持在625 m/s 左右,开始以匀速飞行;150 s 之后,导弹进入末端制导段,速度开始减小,飞向并击毁目标。
依据图6 的弹道倾角随时间的变化曲线可以看出,在无控阶段,弹道倾角逐渐减小,直到发动机开始工作,弹道的倾角开始增大;导弹转至平飞段后,弹道倾角急速减小到0,并在平飞段一直保持在0;在比例导引阶段,导弹加速向目标飞去,并且在此过程中,弹道倾角不断减小。

图5 速度-时间曲线Fig.5 Velocity-time curve
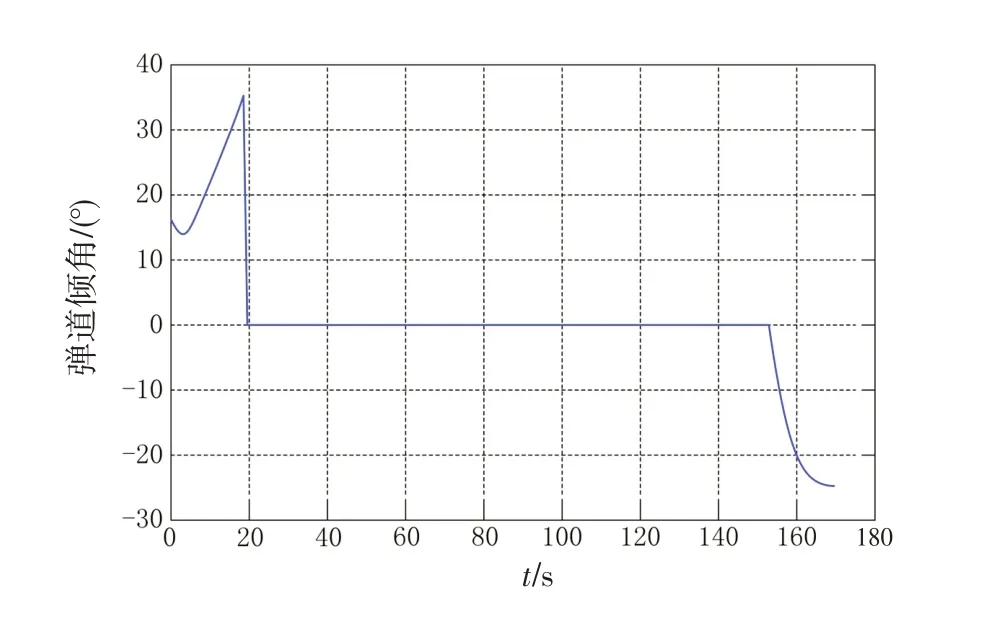
图6 弹道倾角-时间曲线Fig.6 Ballistic inclination-time curve

图7 俯仰角-时间曲线Fig.7 Pitch angle-time curve
4 结论
根据以上一系列图示的仿真结果,炮射导弹可以实现自寻的模式。本文在前人提出的“自寻的”炮射导弹的基础之上,设计了上文所示的可以实现顶部攻击的、对静止目标或慢速移动目标实现高毁伤打击的炮射导弹弹道模型。
从仿真的结果来看,当初速等参数一定时,就可以确定一条弹道曲线。所以,只要改变模型中的相应参数,导弹飞行时间、射程、弹道高度、落点速度都会做出相应的改变。本文所提到的研究方法、思路和分析方法可以为未来实现炮射导弹智能化提供借鉴,具有一定的实际意义。
