深水区大型构件安装水下测量定位技术
2020-07-25涂同珩程茂林杨秀礼
涂同珩,程茂林,杨秀礼
(1.中交第二航务工程局有限公司,湖北 武汉 430040;2.长大桥梁建设施工技术交通行业重点实验室,湖北 武汉 430040;3.交通运输行业交通基础设施智能制造技术研发中心,湖北 武汉 430040)
以长江南京以下12.5 m深水航道二期工程仪征水道整治工程为研究背景,针对水下大型预制构件安装过程中面临的水深大、水下能见度低、整平精度要求高等技术难题,为保证安装作业高精度、高效率地完成,对深水区大型构件安装水下测量定位技术进行研究。
工程施工地点位于世业洲西侧,整治建筑物主要位于世业洲西侧洲头,由头部潜堤、头部潜堤南北侧丁坝、右缘丁坝、左汊护底带以及护岸组成(图1)。仪征水道整治工程头部潜堤、SL1丁坝、SL2丁坝和Y1丁坝均采用“抛石基床+梯形空心构件”的混合堤结构形式[1-2]。
基床整平完毕后,在其上部进行梯形空心构件的精确安装,空心构件顶宽2.0 m,底宽6.0 m,高6.0 m,壁厚0.6 m,长4.94 m,安装缝宽为60 mm(图2)。单个构件质量为180 t,共安装梯形空心构件369个。

图1 世业洲整治建筑物平面图

图2 梯形空心构件安装断面图(高程:m;尺寸:mm。下同)
本工程梯形空心构件安装基床沿轴线方向存在0.9%的坡降,构件安装设计缝宽为60 mm,允许偏差为±3 cm,安装精度要求高。按照水位高程为3 m计算,采用大型起重船进行安装时,构件安装最大水深达16.6 m,同时此区域最大流速超过2 m/s,且水流紊乱,构件水下安装难度大,给测量带来较大困难,因此需要开发一套水下测量定位系统,以保证梯形空心构件的安装精度与效率。
根据梯形空心构件的外形尺寸及安装的精度要求,首先设计一款用于搭载测量设备的测量架,然后利用GPS、倾斜仪采集的数据及构件的外形结构尺寸,测量得到构件相关定位数据,根据测量结果对构件进行一次调整。最后根据水下采集得到的构件安装图像,测量分析其间缝宽,根据分析结果对构件进行二次精确调整。
1 专用测量架设计
针对工程施工区域的工况条件及梯形空心构件安装要求,为构件水下安装提供精确测量定位,设计了专用的测量架,用于安装测量定位和检测仪器。测量架布置在吊架的2组吊钩之间,由1个基础底座和安装在两侧的测量杆组成,并采用4条铁链与吊架相连,以保证测量架与空心构件相对位置参数不受吊具受力变形的影响(图3)。

图3 专用吊具及测量架
测量架基础底座通过底部的2根φ180 mm钢管插销安装在梯形空心构件顶部,空心构件顶部预留φ200 mm孔洞,底座上安装1台水下倾斜仪,2根测量杆伸出水面,顶部各安装1台GPS天线。
为减小水流引起测量杆晃动产生的测量误差,测量杆采用φ200 mm的镀锌钢管制作,同时增加斜撑以提高测量杆刚度,并将测量杆通过2道横撑连接,使测量架形成整体。测量杆设置成2节,通过法兰连接,水深较浅时可拆除1节,减小测量杆自由端长度。
测量架下游侧安装2台带有清水箱的水下摄像机。倾斜仪与GPS定位系统组成方位数据采集系统,连接至浮吊船上的控制电脑中,通过控制软件实时显示梯形空心构件实际位置与设计位置的偏差情况,并通过对水下摄像机采集图像进行分析计算,得到空心构件与上一构件的缝宽、错牙等数据,对测量定位系统进行校核。
2 基于GPS和倾斜仪的测量系统
2.1 技术路线
该测量系统采用专用定位软件接收GPS和倾斜仪传递的数据,通过软件界面实时显示构件的水平度、平面位置、高程及相邻构件间错牙、缝宽和轴线偏差等各项测量项目,从而可通过电脑屏幕直观地掌握梯形构件的水下方位,指导船位移调整构件位置,实现深水、大流速等复杂施工环境下的实时精确测量,提高安装精度。
2.2 系统组成
系统由数据采集设备、数据通讯设备和软件3个部分组成。系统硬件设备的通讯交互关系如图4所示。
1)数据采集设备。RTK GPS 2台,用于接收GPS实时定位数据,确定空心构件的位置;倾斜仪1台,用于测量空心构件的倾斜姿态。
2)数据通讯设备。串口服务器1台,接收GPS与倾斜仪数据,通过无线AP传输给电脑,供软件使用;无线AP 2台,为远距离无线通讯设备,用于在多个设备间传递数据。
3)软件。空心构件测量定位系统软件由3个主要模块组成,其中显示模块是软件系统的主显示监控模块,承担对定位数据的处理、显示与存档功能;项目管理模块用于项目参数管理;串口通讯模块用于数据通讯。该软件可实时监控位置偏差、方位角偏差和二维倾角偏差,同时还能显示正在安装的空心构件与相邻构件之间的间距、错牙等参数。

图4 测控系统设备连接
2.3 系统配置
2.3.1通讯模块配置
按照图4所示设备连接关系建立硬件系统,GPS和倾斜仪数据通过串口服务器接收,利用无线AP发送出去。主控电脑通过1根网线和无线AP连接,接收数据。
主控电脑要正常接收数据还需要激活电脑端的端口,使串口服务器的4个接口映射到电脑上。
本系统需要确定的是空心构件的位置,因此需要测量GPS的安装位置和空心构件的相对关系。坐标原点位于空心构件的中心,高程面为空心构件的上表面。GPS的平面坐标和高程都从该点起算。坐标计算好后,输入到软件中。
另外,直接接收的GPS数据是WGS84坐标系下的经纬度坐标,使用之前须转换到当前工程中使用的坐标系中,所以需要输入相应的转换参数。
2.3.2导入施工图
软件运行需要的图纸包括空心构件外形框、安装位置设计图以及周围地理环境背景图等,可在CAD中绘制好后直接加载到测控软件中。
2.3.3设置施工区域和构件尺寸参数
安装设计图导入后,还需要输入该区域相关参数,包括轴线端点坐标和高程、里程起点位置和起点里程。轴线端点坐标为具有同一坡度的堤轴线两端端点坐标,高程即为设计高程;里程起点位置为空心构件安装区域的里程起算点坐标;起点里程为第1个框输入起算点的里程。
要想得到构件边缘的定位信息,还要输入空心构件上、下面的尺寸,以便计算特征点(四角)坐标,包括夹具到空心构件边距和空心构件安装方向。按照设计尺寸,夹具和构件尺寸一样,但考虑到实际制作误差,或者放置误差,两侧可能会有所偏移,故需要量测两边实际边距。
3 基于水下图像的测量系统
本系统先利用在吊具钩腿上安装的2套水下摄像系统,对水下安装部位图像进行采集,然后由终端计算机对图像进行分析计算,得到精确的构件方位信息,最后据此对构件安装位置进行进一步调整。为了减少浑浊水体对采集图像清晰度的影响,水下摄像机须加装清水装置。
3.1 水下图像测量方案
1)首先在梯形构件顶部接近安装边界处标注标准刻度;
2)通过水下摄像机采集梯形构件顶部的标准刻度和构件间缝宽图像;
3)在后方计算机上通过图像处理与计算获取构件间缝宽数值;
4)进行梯形构件的调整,循环上述各步,直至完成所有构件的安装。
图5是水下图像测量系统的处理流程,该流程中图像处理的主要模块如下。
1)水下图像实时采集模块。该模块完成数据源的获取。在实际操作过程中,摄像机被安装在运送榀字梁的吊具上。
2)图像预处理模块。该模块完成图像从RGB图像到二值图像的转化,即数据的初步处理。在实际处理过程中,需要对RGB图像做灰度化和二值化处理,并进行去噪和图像增强[3]。
3)信息输出模块。该模块主要利用提取的特征计算出梯形构件的对齐信息。
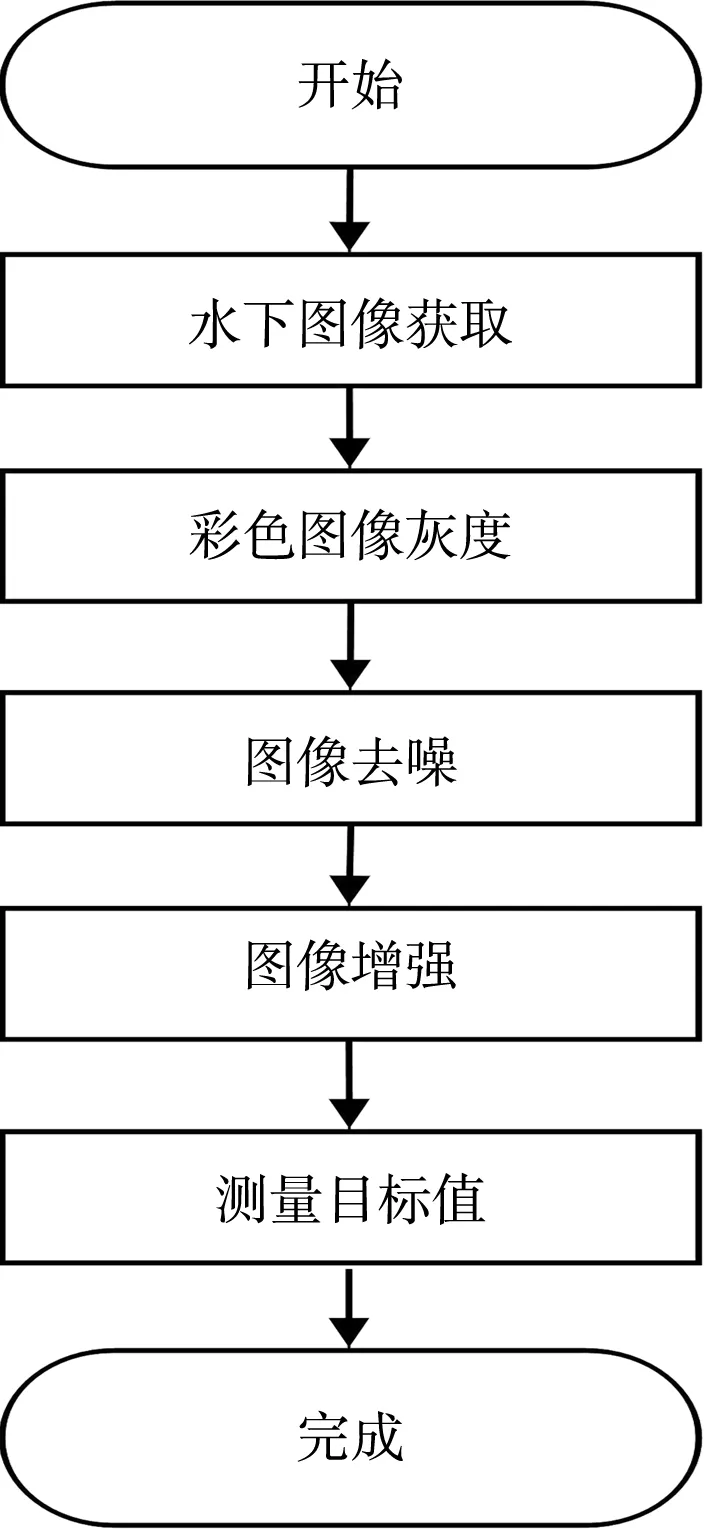
图5 水下图像测量系统流程
基于该测量方案的构件安装位置调整流程,如图6所示。
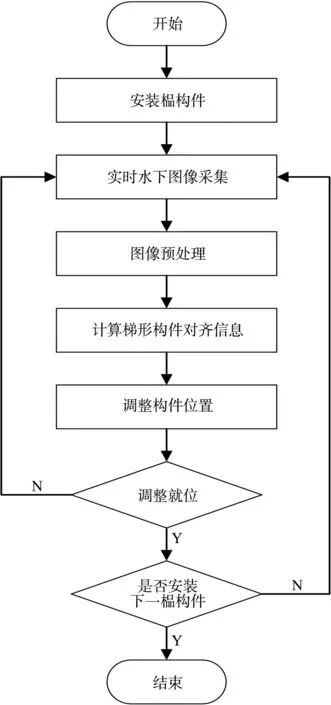
图6 基于水下图像测量的构件位置调整流程
3.2 水下图像测量系统关键技术
3.2.1图像采集
水下安装图像的实时获取是整体设计方案的第1步,通过这一环节获取高质量的图像是保证测量精度的前提。而水下施工现场的特殊环境导致工程对图像采集设备的分辨率提出较高的要求。为保证图像获取的实时性,系统采用可采集为D1格式(分辨率为720×576)的摄像机,每次处理自动从视频中取出1帧图像进行处理。在实际采集的过程中,通过在摄像机前加装清水箱的方法克服水下一定深度处光线较弱、泥沙较多给图像采集带来的困难。
3.2.2图像预处理
通过摄像机获取水下安装部位图像后,须对其进行预处理。本系统图像预处理环节主要采用以下几种方法:
1)图像去噪。受水体环境的影响,采集图像噪点较多,线条边缘较为模糊,这会影响水下图像测量的精度,因此系统采用中值滤波的方法平滑图像中的边界线条。中值滤波基于排序统计理论,是一种能有效抑制噪声的非线性平滑滤波信号处理技术。中值滤波的基本原理是把数字图像中一点的像素值用该点的一个邻域中各点像素值的中值代替,使周围的像素值接近真实值,从而消除孤立的噪声点[4]。
2)图像增强。除了会导致图像噪点较多,水下环境还会降低图像的对比度,这会影响特征提取的有效性,进而降低水下测量的精度。为进一步改善图像质量,系统对水下去噪后的图像进行增强处理。图像增强通过直方图变换来调整对比度,使得图像的测量目标和背景得以较好地区分开来。直方图变换采用变换函数作用于图像的概率密度函数,将直方图变换成所期望的形式,再根据变换后的直方图对图像进行变换,从而增大图像或者某一图像值区间的反差。直方图变换就是对水下灰度图像的某一段灰度区域进行放大或者缩小,使得图像特征更加突出,有利于提取特征[5-6]。
3)图像二值化。二值图像是一种特殊的灰度图像,其像素不是黑就是白,在一定精度下,只有最小灰度值和最大灰度值,没有中间灰度。将灰度图像转化成二值图像的过程称为图像二值化,就是将28个亮度等级的灰度图像通过适当的阈值选取而获得仍然可以反映图像整体和局部特征的二值化图像。图像二值化的方法有固定阈值法和动态阈值法,动态阈值法中比较常见的有OTSU法[7]。本系统采用固定阈值处理方法进行处理。
预处理包括RGB图像转灰度图像并将其二值化、图像去噪、图像增强以及可能的二值图像旋转等步骤(图7)。

图7 水下图像预处理步骤
RGB图像转灰度图像采用整数法,算法公式如下:
Gray=( 299R+ 587G+ 114B+500)/1 000
(1)
式中:R为红色阶数,G为绿色阶数,B为蓝色阶数。
灰度图像二值化采用固定阈值处理方法,原因如下:1)OTSU法自动计算阈值效果不佳;2)特定的施工水域深度阈值变化不大,可以通过试验确定,或在实际使用中提供可调功能,一次调整即可满足系统需求。
4 精度分析
空心构件水下测量定位系统主要由2台天宝GPS和1台水下双轴倾斜仪组成。GPS测量平面误差不超过±20 mm,高程误差不超过±30 mm。倾斜仪精度不超过±0.01°,综合GPS及水下倾斜仪的测量精度,代入梯形空心构件和测量架的相对位置关系,通过计算得到测量定位系统的平面和高程测量误差不超过±30 mm。
表1为本测量系统与全站仪对构件测量定位的精度对比结果。从表1可知,本测量定位系统的计算平面、高程数据与全站仪测量平面、高程数据的误差均小于±30 mm。

表1 空心构件测量定位系统精度对比
在梯形空心构件安装的典型施工过程中,现场人员根据测量定位软件的指令进行安装,构件着床稳定后使用陆上全站仪对构件进行测量。与全站仪测量结果相比,实际安装过程中测量定位系统平面位置误差不超过30 mm,高程误差不超过50 mm。
在利用GPS和倾斜仪测量得到的定位数据进行构件安装粗调整以后,系统还采用计算机视觉方法对水下构件间缝宽进行测量,使测量定位精度进一步提高。
综上所述,测量定位系统的测量精度高,能够满足梯形空心构件水下安装的精度要求。
5 结语
1)深水区大型构件安装水下测量定位技术在长江南京以下12.5 m深水航道二期工程仪征水道整治工程中得到成功应用,解决了空心构件预制安装施工过程中面临的水深大、水下能见度低、安装精度要求高等技术难题。
2)水下可视系统在GPS测量结果的基础上,进一步提高了测量精度,并实现了构件安装的可视化。同时,测控软件实时显示构件方位调整参数,指导船舶移位调整构件位置,进一步提高安装精度。
3)在以后的类似应用场景中,可以针对工程需求优化水下可视化检测技术,如将声呐检测技术集成到测控系统中。这种多技术的融合运用在丰富我国深水构件混合堤施工工艺的同时,也将促进深水航道整治及深水防波堤等工程建设的技术进步。
