菱形翼布局太阳能无人机螺旋桨滑流影响研究
2020-07-25赵炜黄江流周洲张顺家毕鹏
赵炜,黄江流,周洲,张顺家,毕鹏
(1.上海机电工程研究所,上海201109; 2.上海航天动力技术研究所,上海201109;3.西北工业大学 航空学院,西安710072)
随着材料技术与能源技术的不断提高,太阳能无人机得到了迅速的发展,人们越来越接近永久飞行的目标。此类飞机低雷诺数效应显著,大大影响了气动效率。为了追求较高的飞行效率,往往采用大展弦比、轻翼载荷的气动布局,这导致其具有气动弹性问题突出的特点[1-4]。如美国的“太阳神”太阳能无人机[5],其展弦比达到了30.4,在巡航状态平飞时,翼尖挠度能达到展长的25%。而在极限飞行状态下,其上反角可达到50°。严重的气弹问题一方面导致了气动效率的严重损失,另一方面也影响飞行性能与飞行安全[6-7]。针对这一问题,提出了一种菱形翼布局太阳能无人机。其前翼后掠,后翼前掠,前后翼相互搭接,形成一个框架结构,不仅能够有效提高飞机整体的扭转和弯曲刚度,减轻结构质量,还增加了太阳能电池片的铺设面积,提高巡航时间。然而菱形翼布局太阳能无人机具有严重的前后翼相互干扰问题,当采用螺旋桨进行驱动时,螺旋桨滑流对前后翼亦具有不同的气动干扰特性。这些因素都使得带桨状态下的菱形翼太阳能无人机绕流流场极为复杂。
目前,国内外学者针对菱形翼布局无人机的气动特性已经进行了广泛的研究。在国外NASA Langley中心基础气动研究风洞(BART)对美国空军提出的菱形翼传感器飞机同时进行了风洞试验和CFD数值模拟[8]。波音公司“鬼怪”工厂的Ledoux等[9]对菱形翼传感器无人机跨声速巡航时的气动特性进行了研究,并通过对前后翼的优化来实现减阻的目的。在国内,李光里等 对5种不同布局形式的菱形翼方案进行了风洞试验。吴光辉等[11]用CFD方法分别研究了后翼安装角、前后翼连接位置对一种盒式翼大型运输机纵向气动特性的影响规律。上述研究均是基于常规雷诺数范围亚声速干净构型菱形翼布局无人机展开,并未考虑低雷诺数条件下菱形翼布局的复杂流场特性,亦未对动力的影响特性进行分析研究。
此外,在低雷诺数螺旋桨滑流的数值模拟方面,国内外学者研究相对较少。Catalano[12]对雷诺数为35万时,螺旋桨滑流对FX63-137机翼的气动特性进行了研究。王科雷等[13]基于等拉力原则对分布式螺旋桨/单独桨滑流对机翼的气动影响进行了对比研究。王红波等[14]基于非定常面元/黏性涡粒子法对低雷诺数滑流气动干扰进行了研究。然而上述对螺旋桨滑流气动干扰问题的研究都是基于平直机翼简单算例进行的,且得出的结论不一。因此,有必要针对低雷诺数滑流问题开展进一步分析研究。
同时在上述研究中,对于螺旋桨这类旋转体的计算,主要采用基于准定常计算的多重参考坐标系方法以及基于非定常计算的滑移网格技术等方法。上述几种方法均需要真实螺旋桨模型参与计算,网格量较大,故需要消耗极大的计算资源与计算时间。而动量源方法(Momentum Source Method,MSM)[15-16]可以对螺旋桨实体模型进行简化,且具有较高的模拟精度。国外的O’Brien和Smith[17]基于此方法对直升机旋翼桨叶进行了数值模拟。国内的宋长红等[18]也采用该方法对直升机涵道尾桨进行了数值分析。上述研究均表明动量源方法对螺旋桨类旋转体具有较高的数值模拟精度。
因此,本文采用动量源方法对某菱形翼布局太阳能无人机具有低雷诺数效应、前后翼气动干扰及螺旋桨滑流对前后翼具有不同干扰特性的耦合复杂流场进行计算。研究螺旋桨与机翼之间的相互气动干扰,不同转速下螺旋桨滑流对全机气动力、展向载荷分布的影响,针对在不同迎角下螺旋桨滑流在增升减阻与增升增阻的不同影响特性,展开机翼表面的流场结构以及压力分布随迎角变化的分析研究。
1 计算模型
图1所示的菱形翼布局太阳能无人机由前翼(Frt-wing)、后翼(Aft-wing)、外翼(Out-wing)组成。前翼和后翼具有60°夹角,前翼和外翼具有6°上反角,后翼水平布置。各翼段均采用相同翼型,弦长为0.48m,展长为14.4m。此外,该无人机采用双螺旋桨驱动,螺旋桨安装位置为桨盘中心距离对称面1.7m,距离后翼前缘0.5m,所使用的螺旋桨为某型直径为0.6m的双叶螺旋桨,以0°安装角安装于后翼相应位置。2个螺旋桨采用对转形式,左侧螺旋桨旋转方向为顺气流逆时针方向。
本文使用商业软件ICEM进行全结构网格建模,为了更好捕捉近壁面附面层的流动细节,近壁面网格y+取0.5,整体网格量为550万。图2为ICEM-CFD建立的螺旋桨实体模型局部网格示意图。

图1 带动力构型菱形翼布局太阳能无人机Fig.1 Diamond joined-wing configuration solar-powered UAV with power

图2 螺旋桨实体模型局部网格示意图Fig.2 Schematic diagram of local grid of propeller solid model
2 数值模拟方法及试验验证
本文采取有限体积法结合动量源方法基于k-kL-ω 转 捩 模 型 对 雷 诺 平 均 Navier-Stokes(RANS)方程进行求解。在控制方程中,采用二阶精度的Roe迎风离散格式对流通量项进行离散,采用二阶精度的中心差分格式对黏性通量项进行离散。采用隐式LU-SGS(Lower-Upper Symmetric Gauss-Seidel)进行时间推进。
2.1 动量源方法
动量源方法将真实螺旋桨简化成一个薄体圆盘。在前处理中将螺旋桨真实几何信息包含在叶素方法的几何信息上,在计算中通过获取真实流场中的速度信息并与叶素理论相结合,将真实螺旋桨的载荷分布到网格节点上,并将其转化为动量源项加入到Navier-Stokes方程进行求解。在薄体动量源盘中加入动量源项之后,其动量方程变成如下形式:

式中:Sx、Sy、Sz为基于叶素理论推导的动量源项,其具体推导过程可参考文献[18];u、v和w分别为沿x、y和z轴3个方向的速度;τxx、τyx、τzx、τxy、τyy、τzy、τxz、τyz和τzz为沿x、y和z轴3个方向的应力;ρ为气体密度;p为气体压强。
参考笔者课题组对某型直径为0.406 4m的双叶螺旋桨地面条件不同来流速度、不同转速下的试验结果对动量源方法进行数值检验。试验状态分别为来流速度V=0 m/s与V=11.1m/s,试验高度均为海拔高度450m。图3为螺旋桨拉力数值模拟与试验结果对比。
由图3可知,在2种来流状态下,各个转速条件下,螺旋桨试验所测拉力值均与动量源方法数值模拟结果吻合良好。表明本文所采用的动量源方法在大量节省计算时间的情况下仍对螺旋桨具有较高的模拟精度。
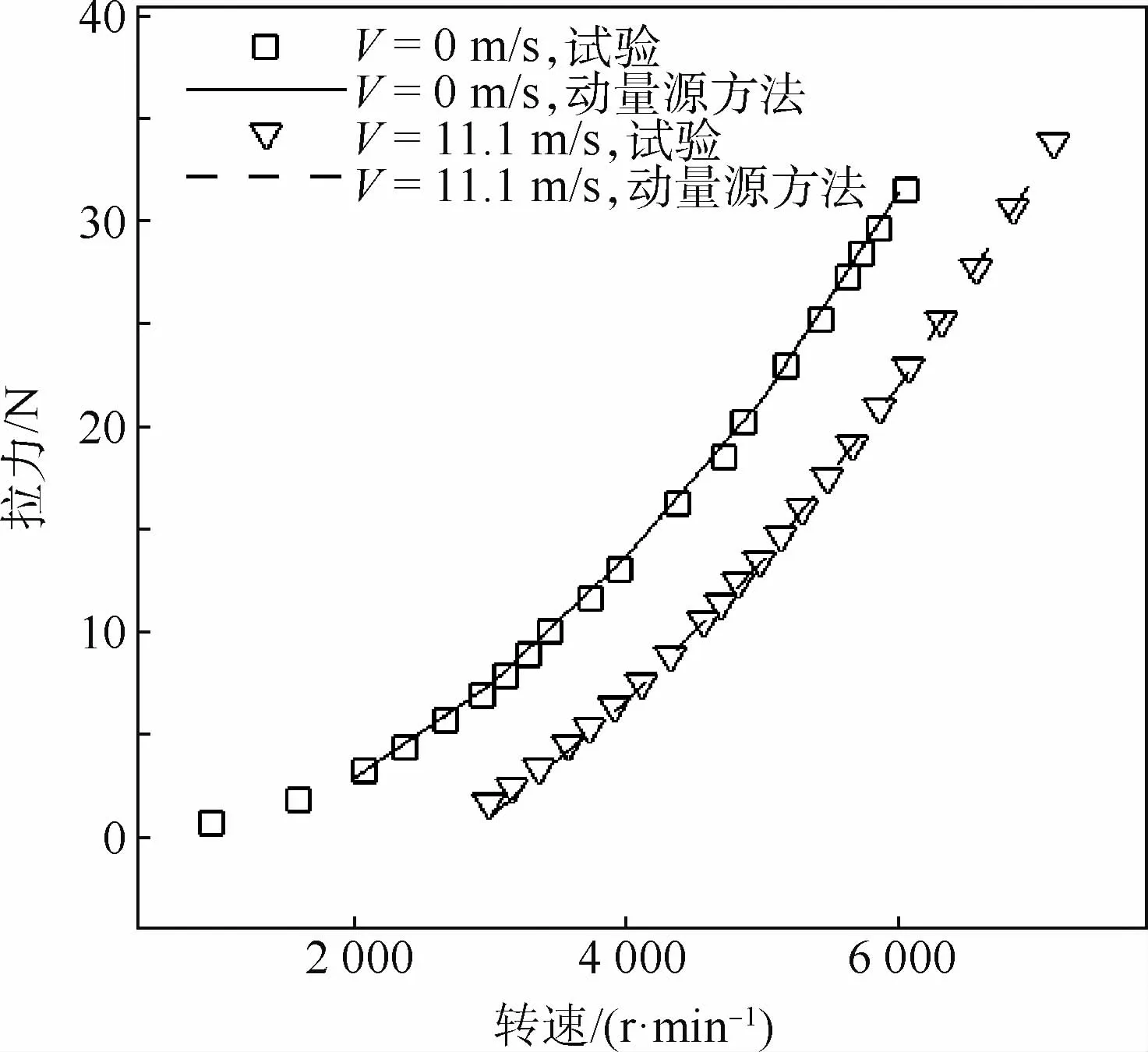
图3 螺旋桨拉力对比Fig.3 Comparison of propeller thrusts
2.2 k-kL-ω转捩模型
在低雷诺数流动中,对近壁面附面层流动的准确模拟以及对转捩点位置的准确捕捉是整个模拟准确的关键。k-kL-ω转捩模型基于局部变量构造,其由Walters和Cok ljat[19]将早期的层流动能方程拓展而来,通过引入“层流动能”来控制转捩的开始和发展。引入“分裂机制”来描述层流与湍流之间的相互作用。其包含了层流动能(kL)、湍流动能(kT)、比耗散率(ω)3个运输方,其方程分别如下所示。
层流动能方程:

式中:PkL为层流动能生成项;RBP为旁路转捩引起的湍流产生项;RNAT为自然转捩引起的湍流产生项;DL为层流动能耗散项;xj为时均距离;μ为黏性系数。
湍流动能方程:

式中:PkT为湍流动能生成项;DT为湍流动能耗散项;αT为湍流标量扩散参数;σk为常数。
比耗散率方程:

式中:Cω1、Cω2、Cω3和CωR均为常数;fW和fω分别为阻尼函数和边界层运动学阻尼函数;σω为常数;d为距离壁面的距离。
本文采用低雷诺数翼型SD7037对本文所采用的低雷诺数数值模拟方法进行验证。与美国伊利诺伊大学(UIUC)低湍流度亚声速风洞试验数据[20]进行对比,计算状态与试验条件保持一致,取来流速度V=15m/s,高度为海拔高度0 km,来流湍流度Tu∞=0.1%,基于弦长的雷诺数Re=3.0×105。计算迎角范围为-6°~16°。图4为CFD计算结果与试验结果的对比,CL和CD分别为升力系数和阻力系数。

图4 升阻力系数CFD与试验结果对比Fig.4 Comparison of lift and drag coefficients between CFD and test results
由图4可以看出,CFD计算结果与试验结果吻合良好,误差始终控制在5%以内。对阻力特性的准确预测表明本文所采取的数值模拟方法可以较为准确地模拟流动分离、转捩、再附等特征。该方法可用于对菱形翼布局太阳能无人机的低雷诺数气动特性计算。
3 螺旋桨转速对菱形翼布局太阳能无人机基本气动特性影响
3.1 转速对气动力影响
基于图1所示的菱形翼布局太阳能无人机,分别针对干净构型及螺旋桨转速为1 320、2 500与3000 r/min时滑流影响下的无人机进行数值模拟。当转速为1320 r/min时螺旋桨所提供的拉力与无人机阻力相匹配,是本文的设计状态。计算状态取为来流速度V=12m/s,计算高度为海拔高度3 km。图5为菱形翼布局无人机在各个转速状况下的宏观气动力计算结果,CM和K分别为俯仰力矩系数和升阻比。

图5 气动力系数随转速变化Fig.5 Variation of aerodynamic force coefficients with rotational speed
由图5可知,在全计算迎角范围内,螺旋桨滑流对全机有一定的增升作用,且这种增升的效果随着计算迎角以及螺旋桨转速的增大而愈发明显。而阻力则在小迎角范围内小于干净构型,当迎角大于2°之后,滑流影响从减阻变化为增阻。并也表现出随转速与迎角的增大而趋势更加明显。同时,随着螺旋桨转速增大,无人机纵向静稳定性裕度增大。最大升阻比所对应的角度从2°逐渐前移到了0°,且最大升阻比也相应增大,从干净构型时的27.2增加到了3 000 r/m in转速时的32.2,最大升阻比提升了18.4%。而在大迎角情况下,由于增升与增阻的共同效应,导致升阻比相比干净构型略微减小。
3.2 螺旋桨转速对展向升力分布影响
螺旋桨滑流将改变机翼表面载荷分布,从而显著影响展向升力分布。图6为0°迎角不同转速条件下的展向升力系数分布。
由图6可知,干净构型菱形翼布局无人机展向升力分布表现为:①在翼尖处由于受到翼尖涡下洗的影响,翼型剖面的升力系数较小,随着剖面逐渐远离翼尖处,翼尖效应逐渐减弱,升力系数逐渐增大。②在靠近前后翼连接处时,由于存在垂尾干扰以及连接处复杂外形影响,剖面的升力系数发生骤降。③随着剖面逐渐往菱形翼内部移动,前翼受到后翼的阻滞、连接处的干扰逐渐减弱,升力系数逐渐增加。④当距离进一步增大时,前翼出现典型的翼根效应,流管扩张,升力系数有略微下降。⑤后翼剖面的升力系数随着与连接处位置逐渐远离,连接处与前翼对其的干扰越来越小,升力系数逐渐增大。

图6 展向升力系数分布Fig.6 Spanwise lift coefficient distribution
带桨状态无人机的展向升力系数分布与干净构型无人机相比,除了在螺旋桨滑流覆盖范围之外的绝大部分范围内相贴合。在螺旋桨滑流影响范围内,前翼由于受到气流加速的影响,升力系数相较于无动力状态有所增大。后翼由于受到螺旋桨气流旋转效应的影响,出现上下洗效应。在下洗侧升力系数有所减小,在上洗侧,升力系数显著增大。而随着远离螺旋桨影响区域,翼剖面的升力系数开始恢复至与干净构型一致。随着转速的增大,上述趋势更加明显,受螺旋桨滑流影响的区域也逐渐变大。
4 典型迎角流场结构分析
由第3节可知,在不同的迎角情况下,螺旋桨滑流对无人机的气动特性的影响有所不同。本文接下来将选取典型大小迎角进行细致分析研究。
4.1 0°迎角螺旋桨转速对流场结构影响
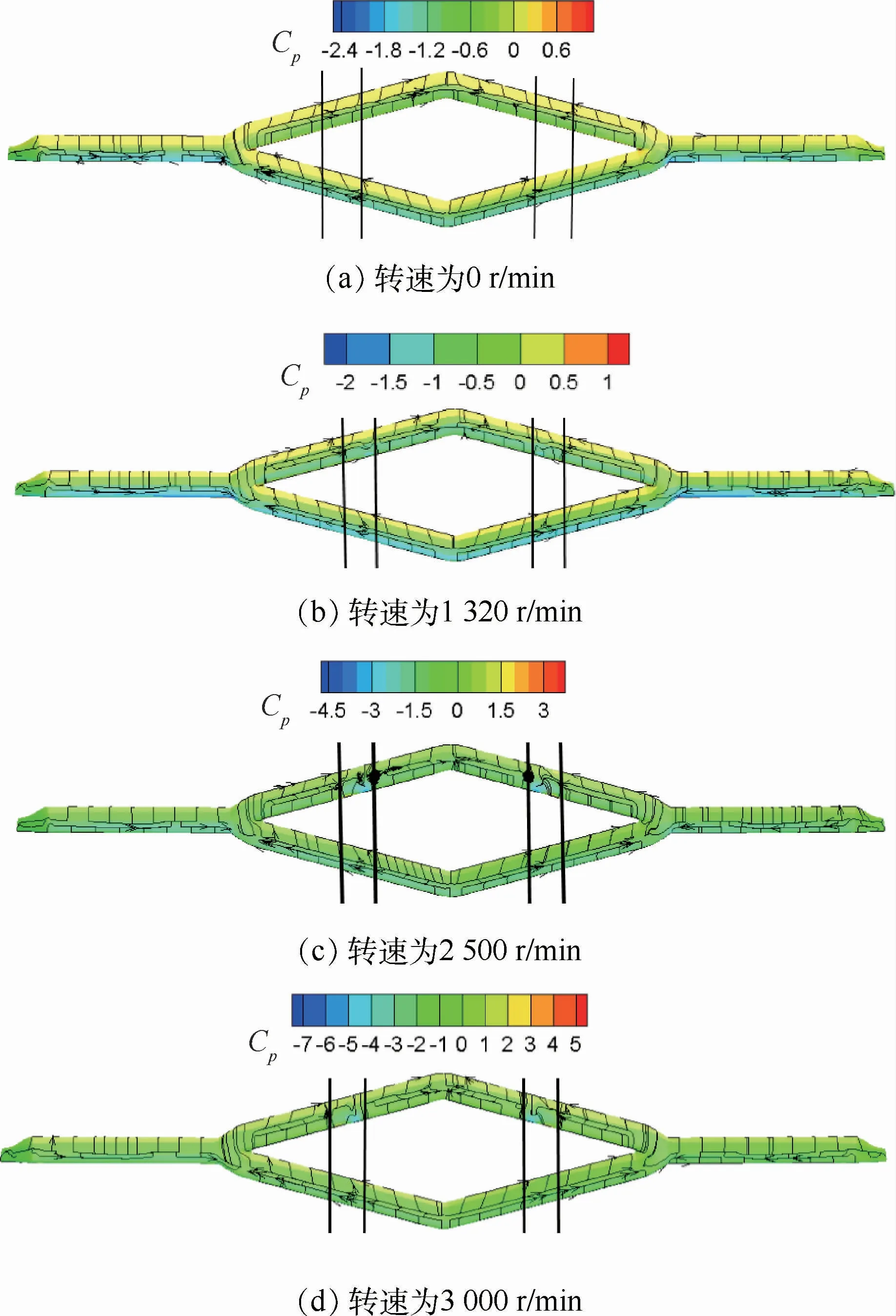
图7 0°迎角不同转速机翼表面流场结构Fig7 Flow field structures of wing surface at different rotational speeds and 0°angle of attack
将4种不同转速0°迎角情况下的表面流场结构进行对比分析。图7为4种转速条件下的无人机表面压力分布与极限流线图,图中黑线对应的为螺旋桨桨盘对应区域,Cp为压力系数。
由图7可知,随着螺旋桨转速的增大,整体流场的结构没有明显的变化。只在螺旋桨桨盘所对应范围内有明显区别。从图中可以看出,前翼气流受螺旋桨抽吸作用,加速明显。随着螺旋桨转速的提升,其前缘的低压区不断向后延伸,且范围也越来越大。但是其流场结构、分离泡的位置及形态并未随着转速增大而发生明显改变。后翼除了受到螺旋桨对气流的加速作用外,还受到螺旋桨对气流的旋转作用。随着转速的增大,后翼流场结构变得越来越复杂,且滑流区范围也逐渐扩大。对于后翼流场结构受螺旋桨转速增大的改变,本文将截取后翼受螺旋桨滑流影响区域的局部翼段来进行分析。图8为后翼螺旋桨对应位置的局部极限流线与压力分布。
由图8可以看出,在螺旋桨后部,流线受螺旋桨旋转与加速效应明显。在受下洗气流影响的区域,机翼前缘出现局部高压区,但是沿弦向来看,其仍存在低压区后移的特点。这主要与螺旋桨对气流的加速效应有关。从图8(b)可以看出,在低转速情况下,在机翼上表面受下洗气流影响区域,有效迎角减小,流动分离推迟。而在受上洗气流影响区,有效迎角增大,流动分离提前。这与层流分离泡随迎角的变化关系一致。而机翼下表面由于并不存在分离现象,故只表现出低压区后移,流线向低压区偏移的特点。
随着转速不断增大,上述趋势明显。机翼表面的低压区不断增大。对气流的能量注入也更加充沛,气流抵抗逆压梯度能力不断增强,表现出机翼受滑流影响区域层流分离现象逐渐消失。此外,由于滑流区域气流速度明显要高于周围,存在明显的剪切作用。且随着螺旋桨转速的增大,这种作用越来越明显,从而在速度剪切层内诱导出展向涡结构。
为了更好地了解螺旋桨前后翼表面压力分布,沿展向截取3个截面进行压力系数分布的比较。截面位置分别为距离桨盘中心为桨盘半径R处以及螺旋桨中心对称面,具体的截面位置如图9所示,A为下洗侧,C为上洗侧。截面压力系数分布如图10所示,c为弦长,x/c为沿弦长的相对位置。
由图10可知,3个截面处前翼的压力分布随转速变化较为一致。均表现出翼型上表面随着转速的增大,受到气流加速的影响,动压增大,压力系数减小。而下翼面也有类似的现象。但是由于本文采用的菱形翼布局无人机前翼具有一定的上反角以及后掠角,故翼段各个截面所受气流的加速效果不尽相同。由于前翼上反,C截面相对桨盘位置相对偏上,在垂向拥有较好的加速效果。同时由于前翼后掠,A截面相对桨盘更近,在弦向加速效果最佳。在两者的综合影响下,A、B截面加速效应相当,C截面相对较差。
同时由于螺旋桨位于前翼后部,对前翼后缘的加速效应随着转速的增大而加强,后缘的压力系数明显减小。这也导致前翼的压差阻力随着转速的增大而增大。

图8 0°迎角不同转速后翼局部流场结构Fig.8 Flow field structures of part of Aft-wing surface at different rotational speeds and 0°angle of attack

图9 截面位置示意图Fig.9 Schematic diagram of section position
而后翼除了受到气流加速效应之外还有旋转作用。由于气流旋转效应的存在,使得在受上气流影响区域,上表面存在低压区,下表面存在高压区,从而使得升力系数增大。而受下洗气流影响区域则刚好相反。A截面受下洗气流的影响,上表面吸力峰值明显减小,且后移。而下表面由于存在低压区,在气流经过驻点之后,压力系数迅速减小,达到一个峰值,使得下表面也沿弦向也存在一个逆压梯度。B截面,气流的旋转效应减弱,在气流的加速效应下,其上下表面前缘均存低压区,且转速越高,低压区越明显。C截面受到上洗气流的影响,前缘的吸力峰值明显变大,而下表面则无明显变化。这些变化均有利于减少后翼的压差阻力。
表1和表2分别列出了0°迎角时,菱形翼布局太阳能无人机在各螺旋桨转速下组成部件的阻力系数和升力系数。
根据表1结果可知:①随着转速的增大,螺旋桨气流对前翼抽吸作用增强,后缘压力恢复到较低水平,使得前翼压差阻力略有增大。同时由于螺旋桨气流对前翼流场结构并未造成较大变化,对应的摩擦阻力也没有明显变化。②后翼受到气流加速及旋转影响,前缘吸力增强,有效减小了压差阻力,故压差阻力系数随着转速的增大而减小。螺旋桨做功为气流注入能量,气流抵抗逆压梯度的能力增强。因此随着螺旋桨转速的增大,后翼湍流流动逐渐增强,层流分离泡逐渐消失,摩擦阻力不断增大。③无人机的阻力随着转速的增大而减小,且阻力减小的主要贡献来自于后翼。
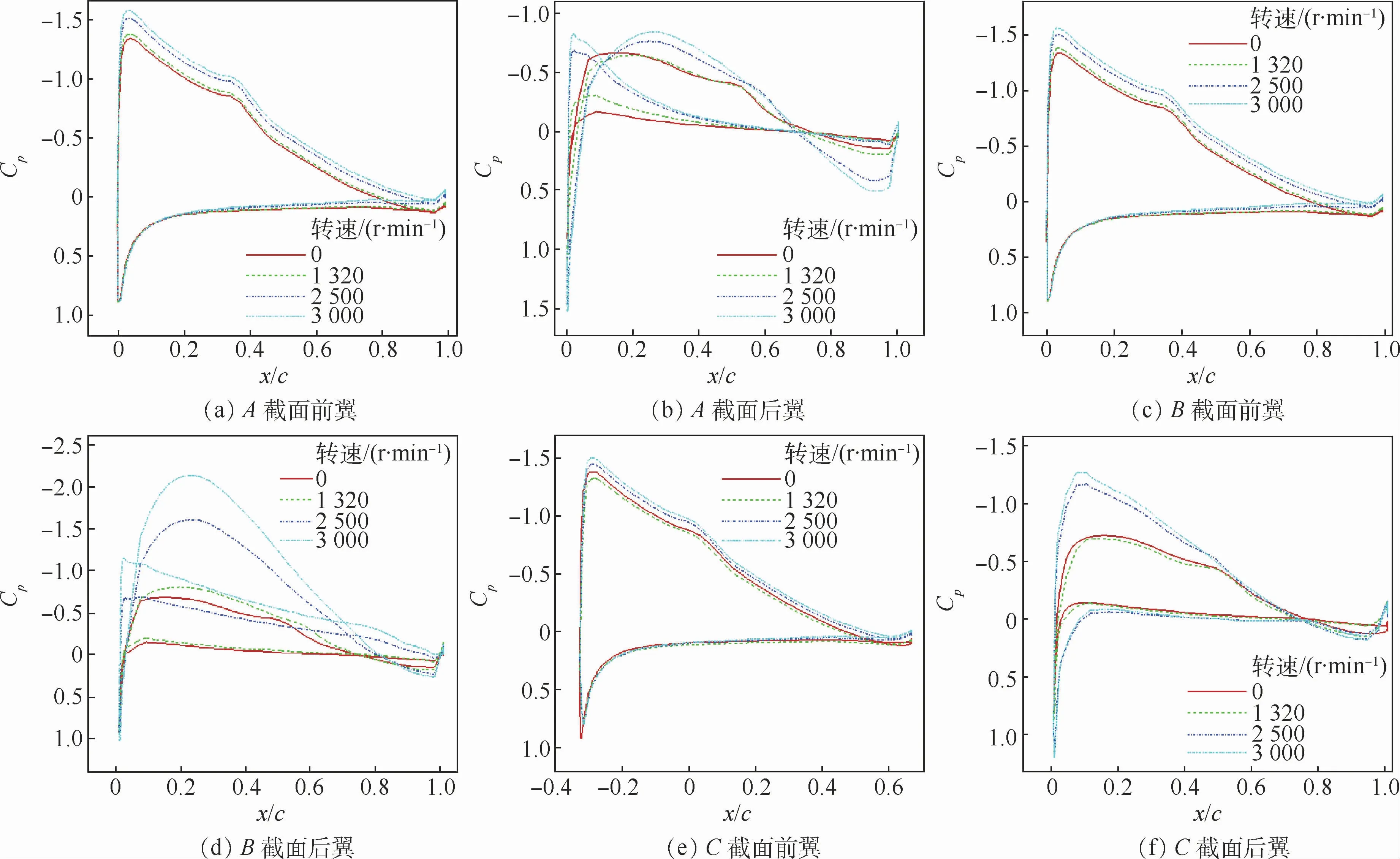
图10 0°迎角截面不同转速压力系数分布对比Fig.10 Comparison of pressure coefficient distribution at different rotational speeds at 0°angle of attack sections

表1 0°迎角时阻力系数随转速变化Table 1 Variation of d rag coefficient w ith rotational speed at 0°angle of attack

表2 0°迎角时升力系数随转速变化Table 2 Variation of lift coefficient w ith rotational speed at 0°angle of attack
从表2可知,随着螺旋桨转速增大,对气流的加速效果明显,前后翼及总的升力均增大。从升力系数的分布上来看,后翼由于受到前翼下洗气流的影响,其升力系数仅为前翼的40%左右。从升力系数增量上来看,后翼升力系数的增量也约占总升力系数增量的40%。故在小迎角时,前翼是升力系数增量的主要贡献者。
4.2 10°迎角螺旋桨转速对流场结构影响
从4.1节可知,不同转速条件下,螺旋桨滑流对流场结构的影响主要位于后翼螺旋桨桨盘所对应区域。故此处不再对整机流场结构图进行展示,仅展示10°迎角情况下后翼螺旋桨对应区域的流场结构图。图11为10°迎角不同转速后翼局部流场结构。
由图11可知,在大迎角时,由于前翼流动发生大范围分离,尾流湍动能增加,此时处于尾流中的后翼层流分离现象已经消失,以全湍流动为主,且4.1节所述的展向涡消失。机翼下表面几乎都被高压区覆盖,且与小迎角时相比,下表面低压区范围较小,强度较弱。这造成了螺旋桨滑流在不同迎角下对升力与阻力的不同影响效应。本文将通过图12所示的10°迎角压力系数分布来详细解释。
由图12可知:①前翼压力系数分布随转速变化与小迎角时较为一致,此处不再赘述。②气流旋转效应减弱。受下洗气流影响的A截面后翼,下翼面低压区强度及范围减弱。前缘负升力区消失,增升效果改善。③气流加速效应加强。后翼B、C 2个截面处均表现出上翼面压力系数减小,下翼面压力系数增大。这表明对气流的加速导致动压增大效果明显,增升显著。表3与表4分别列举了在10°迎角时各转速下前后翼阻力系数与升力系数大小。
由表3可以得出:①在大迎角下,前翼气动力系数的变化趋势与小迎角时保持一致,均表现出随着转速的增大,压差阻力增大,摩擦阻力变化很小。②随着转速的增大,后翼下翼面吸力区消失,压差阻力增大。③由于螺旋桨转速提高,湍动能丰富度提高,湍流流动特性进一步增强,使得摩擦阻力增大。④前后翼压差阻力随转速的迅速增大,使得在大迎角下,整机阻力随螺旋桨转速的提高而提高,在很大程度上抵消了螺旋桨滑流增升所带来的优势。
由表4可以看出,升力变化趋势与0°迎角时相同,均表现出随着转速的增大,前后翼的升力均有所增大。但是从升力增量的组成部分而言,由于后翼流场环境的改善,此时升力增量的60%来自于后翼,40%来自于前翼。正是由于在大小迎角时,升力增量的主要贡献部件不同,导致在小迎角时,无人机受前翼升力增量偏大影响有抬头趋势。而在大迎角时则刚好相反。在这两者的共同作用下,无人机的纵向静稳定裕度增大。

图11 10°迎角不同转速后翼局部流场结构Fig.11 Flow field structures of part of A ft-wing surface at different rotational speeds and 10°angle of attack

图12 10°迎角截面不同转速压力系数分布对比Fig.12 Comparison of pressure coefficient distribution at different rotational speeds at 10°angle of attack sections

表3 10°迎角时阻力系数随转速变化Table 3 Variation of drag coefficient w ith rotational speed at 10°angle of attack

表4 10°迎角时升力系数随转速变化Table 4 Variation of lift coefficient w ith rotational speed at 10°angle of attack
5 结 论
1)螺旋桨滑流在小迎角下表现出增升减阻的效果,在转速为3000 r/m in时,最大升阻比提升了18.4%。而在大迎角下表现出增升增阻的效果,升阻比略微减小。且这2种趋势均随着转速的增大而愈发明显。
2)在小迎角时,后翼受螺旋桨气流旋转效应影响,前缘上下表面出现较强吸力区,导致压差阻力减小。螺旋桨对气流做功,后翼湍流流动增强,摩擦阻力增大。螺旋桨加速效应增大了动压,整体升力增大。
3)在大迎角时,螺旋桨旋转效应减弱,加速效应增强。后翼受下洗气流影响的前缘下翼面低压吸力区消失,增升效果较小迎角改善,压差阻力增大。
4)在不同迎角下,升力增量的主要贡献部件不同导致菱形翼布局无人机纵向静稳定裕度随转速增大而有所增大。
从计算结果可以看出,螺旋桨转速的增大在小迎角下对此种菱形翼布局无人机而言,可以有效增升减阻,且升力增量的主要贡献者为前翼,阻力减小的主要贡献者为后翼。前后翼的相互配合有效利用了螺旋桨滑流的影响,最大升阻比有较大提高。在后续的设计中,可以有效利用这种现象。尽量选择高转速螺旋桨,并通过设计前后翼的相对位置关系,螺旋桨的位置来使得前后翼在增升与减阻方面发挥各自的优势,从而取得一个最优的效果。
