自动化飞行训练评估中的战机机动动作识别
2020-07-25孟光磊张慧敏朴海音梁宵周铭哲
孟光磊,张慧敏,朴海音,梁宵,周铭哲
(1.沈阳航空航天大学 自动化学院,沈阳110136; 2.中航工业沈阳飞机设计研究所,沈阳110035)
军用战机具有速度快、机动性强、战术动作灵活多样的特点,对于飞行员训练有着很高的要求。目前,飞行员的训练方式包括模拟机训练和实际飞行训练2种,采用的评估方法主要是由教练员根据经验进行评价。随着人工智能技术的进步,对于研发自动化飞行训练评估系统,减少人为因素误判,降低飞行训练成本的需求愈发明确。本文重点研究战机机动动作在线识别方法,通过实时通报战机的机动动作,并输出飞行动作过程中关键阶段的航行诸元,为自动化的飞行训练评估奠定基础。
目前,战机机动动作识别采用的方法主要有4类:①基于专家系统的机动动作识别方法[1-2];②基于概率图模型的机动动作识别,如隐马尔可夫模型(Hidden Markov Model,HMM)[3]、贝叶斯网络模型(Bayesian Network,BN)[4-6];③神经网络[7-8];④利用飞行参数数据进行离线识别的模糊支持向量机方法[9]。文献[1]基于领域专家的先验知识建立了飞行动作识别知识库,该方法对于仪表科目的识别率较高,但对于简单特技科目和复杂特技科目的识别率下降明显。文献[3]建立了战机机动动作识别的动态贝叶斯网络模型,该方法对于复杂机动动作具有较高的识别率,但是计算复杂度较高,难以在线应用,而且需要的滚转角信息在实际飞行训练中难以通过探测手段获取。文献[7]采用神经网络算法进行机动识别,但是需要大量的训练样本来提高机动动作识别准确率。文献[9]采用的模糊支持向量机方法与传统方法相比,提高了识别率。
为满足实际飞行训练过程中对战机机动动作的在线识别需求,本文提出了一种新型的动态贝叶斯网络模型。通过综合分析战机飞行过程中各类参数的变化,选取了在机动动作执行中占主要影响的飞行参数,克服了传统方法需要滚转角信息的缺点,具有实际应用价值。在推理过程中,设计了在线调用机制,解决了传统贝叶斯网络算法因多次迭代推理导致的计算复杂、识别速度慢的问题。
1 战机机动动作特征分析
战机飞行机动训练包含3类科目:仪表、简单特技和复杂特技[1]。典型战机机动动作说明如表1所示。
战机飞行过程中伴随着各种参数的变化,包括飞行高度、飞行速度、俯仰角、滚转角、航向角、迎角和侧滑角等。由于飞机滚转角不能通过雷达探测手段在线获取,因此选取对机动动作影响最大的飞行高度、航向角、飞行高度变化率、航向角变化率和飞行速度作为战机机动动作识别的主要特征[10]。飞行高度H是指在地面坐标系下飞机质心离地的垂直高度;航向角φ是指机体坐标轴xb在水平面上的投影与地面坐标轴xg间的夹角,机头右偏航时为正。地面坐标系、机体坐标系、飞行高度H、航向角φ和飞行速度Vk定义如图1所示。

表1 典型战机机动动作说明Table 1 Descrip tion of typical fighter m aneuvers
通过对各类机动动作的姿态变化规律进行分析,并结合大量的实际飞行数据进行验证,总结出如表2所示的各类机动动作对应上述5种参数的变化特征。表中所有自然连续的随机变量,如高度、速度等,通过把它们的取值变化范围划分成几个合理的区间来离散化,从而和定性描述的变化特征形成一一对应的关系。

图1 坐标系及飞行参数Fig.1 Coordinate system and flight parameters

表2 战机机动动作参数特征分析Tab le 2 Characteristic analysis of fighter m aneuver param eters
2 战机机动动作识别模型构建
2.1 网络结构建立
在飞行训练过程中,飞行参数的变化是实时且连续的,动态贝叶斯网络可以对跟随时间演化的过程进行表示,从而能够在线监测战机在一段时间内飞行参数特征的变化情况[11]。针对不确定性问题,可以根据观测节点概率推理出其他节点概率[12],因此,本文选用动态贝叶斯网络建立机动动作识别模型。
将选定的5个参数作为动态贝叶斯网络模型的观测节点,根节点为机动动作的识别结果。依照飞行参数的特征划分及其与机动动作之间的依赖关系确立网络中间节点,进而建立了如图2所示的战机机动动作识别动态贝叶斯网络模型。图中:MR表示决策节点,MY为航向分类结果,VK为飞行速度,YAW 为航向角,MA为高度分类结果,YAR为航向角变化率,ALT为飞行高度,ALR为飞行高度变化率。
此网络模型共分4层,底层根据战机的飞行高度和飞行高度变化率进行推理,将典型机动动作按照高度特征进行分类;第二层加入航向角和航向角变化率,对底层的推理结果进行细化,识别出水平直线类机动动作和其他类机动动作;第三层加入飞行速度信息,对水平直线类机动动作进行速度区分;顶层得到每种机动动作的识别概率,对应概率最大的即为识别机动动作结果。各个节点的状态集如表3所示。

图2 战机机动动作识别动态贝叶斯网络模型Fig.2 Dynamic Bayesian network model for fightermaneuver recognition

表3 节点状态集说明Table 3 Description of node state set
2.2 网络参数设定
动态贝叶斯网络推理的实质是进行概率计算。此网络模型中的条件概率及状态转移概率均基于领域专家知识确定。
以高度分类结果MA为例,其条件概率表(Condition Probability Table,CPT)如表4所示。

表4 高度分类结果CPTTab le 4 CPT of altitude classification resu lts
3 模型在线调用与推理
基于建立的战机机动动作识别模型,根据当前的特征提取结果更新网络观测节点状态,推理得到目标节点的概率分布。具体的战机机动动作识别流程如图3所示。
3.1 模型在线调用机制

图3 战机机动动作识别流程Fig.3 Fightermaneuver recognition flowchart
传统的利用动态贝叶斯网络实现战机机动动作识别的过程复杂,每个迭代周期都需要重新结合转移概率计算识别概率,由于大量的运算,导致识别时间延长。分析可知,当动态贝叶斯网络模型已收敛,且机动动作参数特征未发生改变时,进行迭代推理对识别结果没有影响,在此种情况下不需要更新上一时刻推理结果,从而可以使识别时间大大减少。因此,为了降低计算复杂度、提高系统运行速度和识别实时性,本文设计了战机机动动作识别模型的在线调用机制。
当系统运行中满足以下2个条件之一时,系统才进行模型推理,更新机动动作识别概率。
1)动态贝叶斯网络模型未收敛。在每个定时器周期内对识别概率进行判断,当出现某机动动作识别概率大于90%的情况时,视网络模型处于收敛状态,否则标记网络模型未收敛。
2)战机机动动作特征提取结果发生变化。
3.2 动态识别网络模型推理算法
动态识别网络模型的推理过程分为4个步骤:
步骤1 根据当前时刻观测信息,计算机动动作识别概率。依据条件独立性假设,将网络模型划分为起点是根节点,终点是相应观测节点的独立推理链路。根据当前时刻观测信息更新每条链路的推理结果,再将各条链路的推理结果相乘得到综合当前时刻证据信息的机动动作识别概率。

4 仿真实验
为验证战机机动动作在线识别方法的有效性,进行了仿真实验,将战机的飞行高度、飞行高度变化率、航向角、航向角变化率和飞行速度数据实时输入识别系统,通过特征提取和模型推理得到机动动作识别结果。实验结果给出了计算复杂度和识别准确率的对比分析。
4.1 在线调用算法复杂度分析
在处理器为Intel(R)Core(TM)i7-6700 CPU@3.4 GHz、内存(RAM)为16.0 GB、64位操作系统配置下,开展仿真实验,分析本文方法的计算复杂度,实验飞行轨迹如图4所示。
经过对输入数据进行特征提取可知,在初始飞行阶段,战机的飞行高度、飞行高度变化率、航向角变化率和飞行速度的特征提取结果为保持,航向角特征提取结果为变小,按照此特征进行推理,识别结果为左盘旋;此特征提取结果维持到第24.05 s,战机的飞行高度、航向角和飞行速度的特征提取结果发生改变,系统启用在线调用机制持续推理,直至动态贝叶斯网络收敛,此时识别结果为急跃升;至第37.05 s,战机的飞行高度、航向角和飞行速度特征提取结果发生改变,进行模型推理,得到识别结果为左盘旋;至第54.05 s,除航向角变化率外的其他特征均发生改变,更新识别结果为俯冲;至第64.05 s,除飞行速度以外的其他特征发生改变,经模型推理,识别得到“S”形急转机动动作。识别过程中具体的特征提取情况如图5所示。
将特征提取结果作为网络的证据节点信息,按照模型推理算法步骤进行网络推理,中间节点MA各状态随时间变化的推理概率如图6所示,时间坐标轴变比例缩放,在特征提取结果发生改变处时间单位长度为1 s,直至推理概率收敛。由图6分析可知,在特征提取结果发生改变时,节点各状态的推理概率迅速发生改变,直至接近收敛处收敛速度有所变缓。

图4 飞行轨迹仿真Fig.4 Flight path simulation
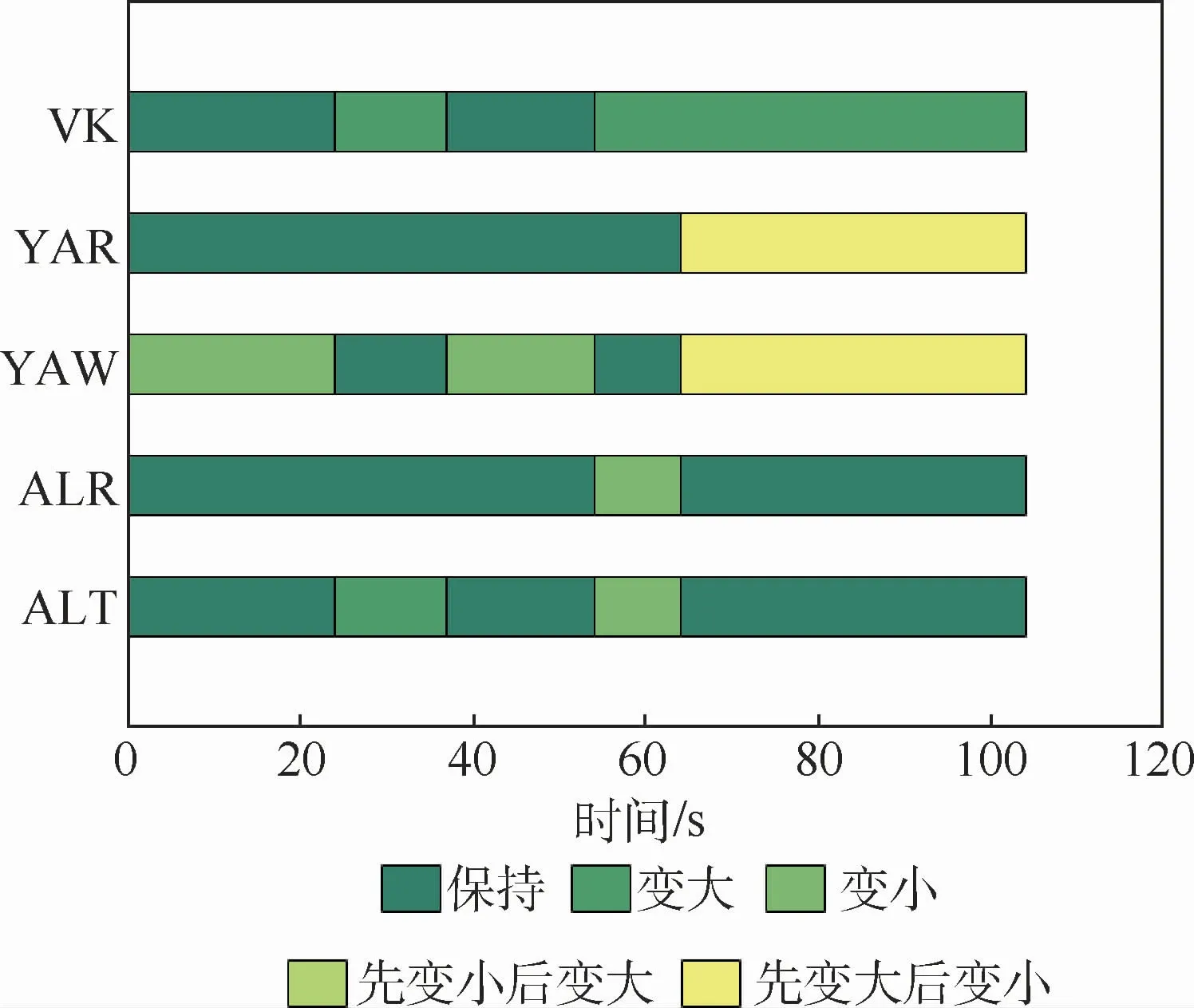
图5 识别过程特征提取结果Fig.5 Feature extraction results in recognition process

图6 推理过程中MA节点推理概率Fig.6 Probability of MA node in reasoning process
在识别过程中,加入在线调用机制的识别方法与传统的贝叶斯网络识别方法相比,避免了不必要的推理过程,使计算时间减少了76.9%。具体推理过程中有无在线调用机制下的识别迭代次数对比如图7所示。模型推理的定时器周期设定为50ms,在线调用机制作用下的模型解算都能在规定周期内完成,具有良好的实时性。
战机机动动作识别概率如图8所示。图中采样时间坐标轴变比例缩放,当特征提取结果发生改变时,即在24 s、37 s、54 s、64 s处,坐标轴单位长度为1 s;至网络收敛,即出现机动动作识别概率达到0.9时,坐标轴单位长度为10 s,直至下一次特征提取结果发生改变。图8中的机动动作编号1~13代表表2中从上至下的13种机动动作。
分析可知,在特征提取结果发生改变后,算法对左盘旋、急跃升和俯冲的识别均能在短时间内完成。对“S”形急转的识别初始阶段,由于航向特征提取结果为变大,右盘旋的识别概率有所增加。后由于航向特征提取完全,“S”形急转的识别概率升高直至网络收敛。

图7 迭代次数对比Fig.7 Comparison of iteration times
4.2 战机机动动作识别率对比
根据战机机动动作飞行高度变化特性,将飞行高度划分为高空层、中间层及低空层,每类高度层中可执行的典型机动动作如表5所示。根据飞行过程中的飞行高度变化,同时考虑各机动动作的衔接合理性,利用蒙特卡罗模拟实验对飞行高度层中可选用的机动动作进行随机调用[13-14]。
对8 000组实验数据进行识别,得出本文方法对仪表类动作识别率为99.7%、简单特技类动作识别率为98.4%、复杂特技类动作识别率为97.2%,与其他2种方法的识别率对比结果如图9所示。

图8 战机机动动作识别概率Fig.8 Flightermaneuver recognition probability

表5 飞行高度层与机动动作合理性选择Table 5 Fligh t level and m aneuver reasonab le choice

图9 识别率对比Fig.9 Comparison of recognition rate
由此看出,具有在线调用机制的动态贝叶斯网络识别算法与传统贝叶斯网络识别算法[3]相比,各类机动动作识别率均有明显提高;与神经网络算法[7]中得到的识别率数据进行直接对比,各类机动动作识别率略有提高,但文献[7]中识别简单和复杂特技类的机动动作数目较少,而且此模型需要大量的数据样本进行模型训练。
5 结 论
本文就战机的机动动作在线识别问题做出了深入地分析和研究,通过仿真实验对比,结果显示本文方法对于战机机动动作的识别率高、实时性好,能够满足在线应用需求,为实现自动化的飞行训练评估奠定了基础。
1)本文方法与传统贝叶斯网络识别算法相比,以战场中可以直接在线获取到的信息为推理依据,因此,其既可以应用于自动化飞行训练评估,也可以推广至空战态势评估和空战决策领域,为预测目标飞行轨迹及评估目标作战意图威胁提供支撑[15-19]。
2)本文方法对于战机机动动作具有较高的识别率。在进行8000次实验条件下,对3类机动动作的识别率为:仪表类99.7%、简单特技类98.4%、复杂特技类97.2%。
3)本文提出的战机机动动作识别贝叶斯网络模型在线调用机制免去了传统贝叶斯网络识别算法中不必要的推理过程,使计算复杂度得到较大程度的降低,满足了在线应用的实时性需求。