基于DMD的时变目标模拟研究*
2020-07-24陈雪旗姜爱民莫小范
陈雪旗,姜爱民,莫小范
(1. 中国科学院国家天文台,北京 100101;2. 中国科学院空间天文与技术重点实验室,北京 100101;3. 中国科学院大学,北京 100049)
地基望远镜在进行太阳观测时,通常需要望远镜对观测区域进行长达几十分钟的高分辨率稳定跟踪。在长时间的观测过程中,地基震动、人员走动和望远镜跟踪机构运动等带来的望远镜机架抖动以及大气湍流扰动不可避免地引起图像偏移。为解决这一问题,通常在望远镜中应用相关跟踪稳像技术,将望远镜主光路中的部分光线分出,通过亚毫秒曝光获得观测目标图像,对观测目标图像与参考图像进行相关计算得到图像偏移量,通过调节插入主光路快摆镜的摆动角度构成闭环控制,对图像偏移予以补偿[1]。实现上述功能的装置也被称为相关跟踪器。
相关跟踪器的补偿效果既与相机和快摆镜的硬件性能和闭环控制算法的软件性能有关,也与所选取的观测目标有关。太阳光球层中的光斑、色球层中的谱斑和日珥以及日冕中的瞬变现象存在时间短,不宜作为相关跟踪器的观测目标。光球层中的黑子存在时间较长,对比度高,是相关跟踪器观测目标的理想选择。但是黑子的数量较少,在太阳表面分布稀疏,所以在感兴趣区域内出现黑子的概率较小。太阳米粒组织是太阳光球的对流层中等离子体对流导致的现象,米粒组织中央的等离子体温度较高,相较于其他区域显得明亮,处于边缘的等离子体由于温度较低而显得较为暗淡。太阳表面每时每刻存在大约400万个米粒组织,单个米粒组织的直径约1 000 km[2],平均寿命约8.6 min[3]。由于太阳米粒组织在观测视场范围内随处可见,因此,在实际观测中没有黑子可做信标时,太阳米粒组织常被选作太阳观测的信标。
天文望远镜的观测时间十分宝贵,为了提高效率,相关跟踪器的大部分开发工作都在实验室中进行,因此,需要模拟太阳图像作为相关跟踪器的观测目标。太阳上的结构均会随时间发生变化,通过胶片投影只能产生静态光学图像,难以模拟太阳结构的时间演化特性。由于日间观测的大气视宁度普遍比夜间差,用于太阳观测的稳像系统的探测帧频通常高于2 000 frame/s。由于应用场景的不同,国内外公司及科研单位研制的目标模拟器的帧频多处于百赫兹量级[4-7]。使用Holoeye公司型号为LC-R 720的硅基液晶空间光调制器(Liquid Crystal on Silicon Spatial Light Modulator, LCoS SLM)进行动态目标模拟实验时发现,显示帧频最高仅达到180 Hz,同时,显示的动态图像存在亮度闪烁现象,因此,它不适用于本系统的应用。数字微镜阵列是美国德州仪器公司生产的一种基于微机电技术(Micro-Electro Mechanical System, MEMS)的空间光调制器,由百万块紧密排列的反射微镜组成,每个微镜的偏转频率可达几十千赫兹。数字微镜阵列为产生动态可调的光学图像、模拟具有时间演化特性的太阳结构图像提供了可能。
1 系统实验与数据处理
基于数字微镜阵列的相关跟踪器实验装置结构如图1,实验光路如图2。其中,冷光源(Cold light source)为数字微镜阵列的照明光源,输出光照射到数字微镜阵列后,处于逻辑1的微镜将光反射到投影光路,经过平面反射的摆镜1(Tip-tilt mirror 1)、主镜(Main mirror)、球面反射的摆镜2(Tip-tilt mirror 2)、分光棱镜(Beam splitter cube)抵达像面,由安装在像面处的高帧频相机采集图像,相机帧频大于2 000 frame/s。采集的图像经数字图像采集卡传输至计算机进行数据处理和分析。
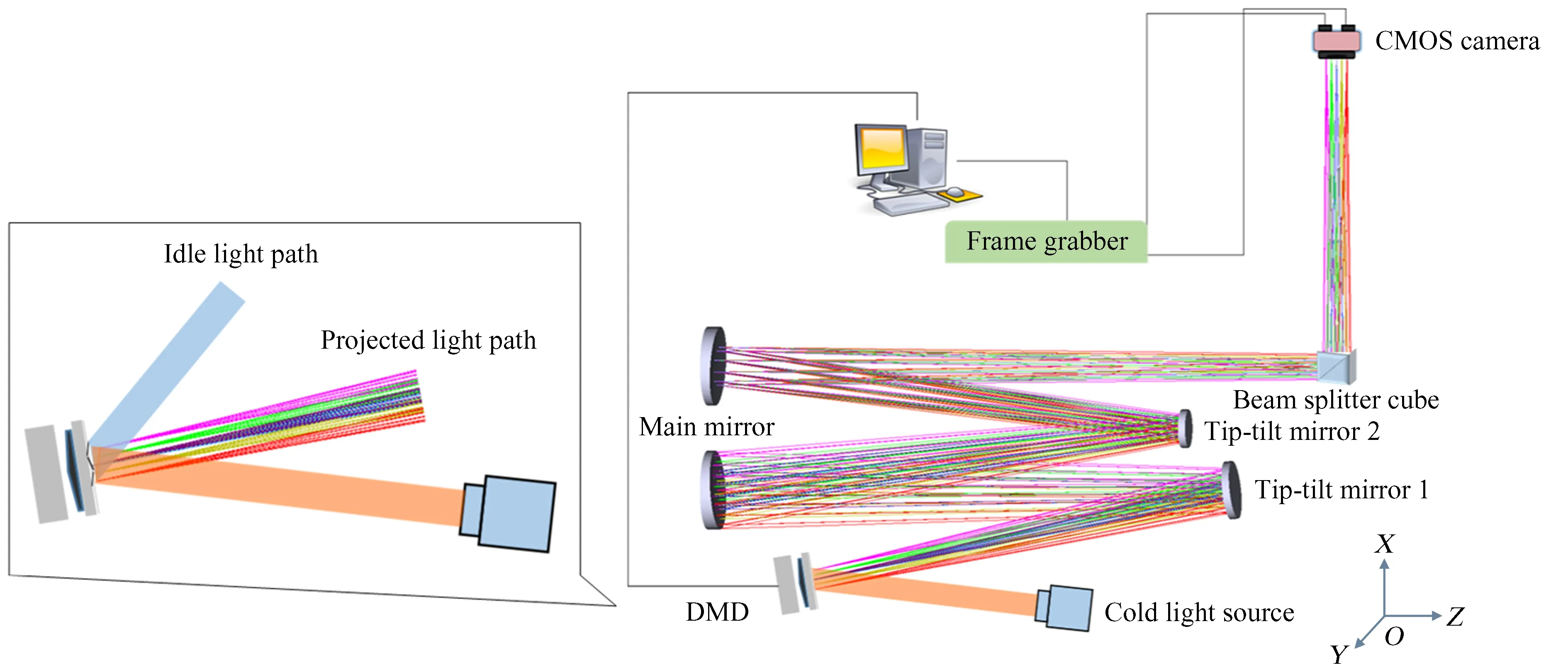
图1 基于数字微镜阵列的相关跟踪稳像系统结构简图Fig.1 Structural diagram of correlation tracker image stabilization system based on DMD
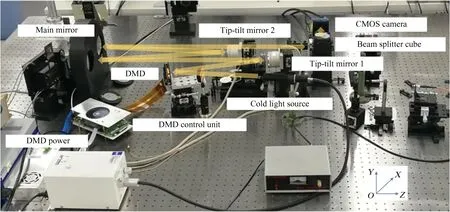
图2 相关跟踪稳像系统实验光路图Fig.2 Experimental light path diagram of correlation tracker image stabilization system
1.1 灰度图像的生成
1.1.1 灰度调制方法
数字微镜阵列由n×m个紧密排布的反射微镜组成,每个微镜安装在一个扭转铰链上,铰链轴沿微镜对角线放置,每个铰链的扭转由驱动电极控制。加电时,微镜以 +θ° 或 -θ° 绕轴倾斜,倾斜角度的正负方向由驱动逻辑值决定。当入射光照射数字微镜阵列时,若逻辑值为1,反射光在微镜反射下进入投影光路;若逻辑值为0,反射光偏转出投影光路。这样,通过控制n×m比特阵列的逻辑取值,即可控制数字微镜阵列输出一帧二值图。
要想获得灰度图输出,需要利用灰度调制技术。数字微镜阵列的灰度调制常见的方法有空间灰度调制、帧灰度调制、脉宽灰度调制,3种方法的时序复杂程度依次递增。本实验使用帧灰度调制法,nbit灰度图像的灰度等级为0~2n-1,将nbit灰度图分解为2n-1幅二值图,通过数字微镜阵列连续输出这些二值图,处于最低有效位平面0上的二值图显示20幅,处于位平面1上的二值图连续显示21幅,以此类推,处于最高有效位平面n-1上的二值图连续显示2(n-1)幅,等效为控制第n帧二值图显示时间为2(n-1)T。通过这些二值图的叠加,在(2n-1)T的时间内获得等效灰度图的显示效果。
实验中使用的数字微镜阵列显示二值图的最高帧频为19 600 Hz,使用帧灰度调制法显示nbit灰度图的最高帧频为19 600/(2n-1)Hz,即显示3 bit灰度图的最高帧频为2 800 Hz,能够达到系统采集速度高于2 000 frame/s的要求。
1.1.2 数字微镜阵列与相机间的时序控制
数字微镜阵列的高帧频特性和帧灰度调制提供了一种产生高帧频灰度图像的方法。但在实际应用时,必须考虑数字微镜阵列与相机之间的时序控制问题。引入时序控制问题的原因是多方面的。
首先,帧灰度调制方法要求相机的曝光时间与组成灰度图的二值图输出序列保持同步。曝光开始或曝光结束无论过早还是过晚,都会导致相机采集的图像与预期不符,引起灰度变化、图像闪烁等现象[4,8]。用特殊设计的图像序列进行测试,当相机与数字微镜阵列同步时,采集的灰度图像中的连续两帧如图3(a);若相机与数字微镜阵列不同步,则这两帧模拟图像如图3(b)。观察图3(b)易知,由于相机积分区间的错位,导致每帧图像包含前一帧图像的最低有效位平面的内容,而图像自身的低位内容丢失。其次,数字微镜阵列从一帧二值图切换为另一帧二值图时,需要12 μs左右完成微镜翻转,在这期间数字微镜阵列输出的光学图像处于动态变化中,与预期状态不符。由于本研究中灰度图的显示时长为亚毫秒量级,远长于微镜的翻转周期,因此,可以忽略微镜翻转对光学图像的影响。
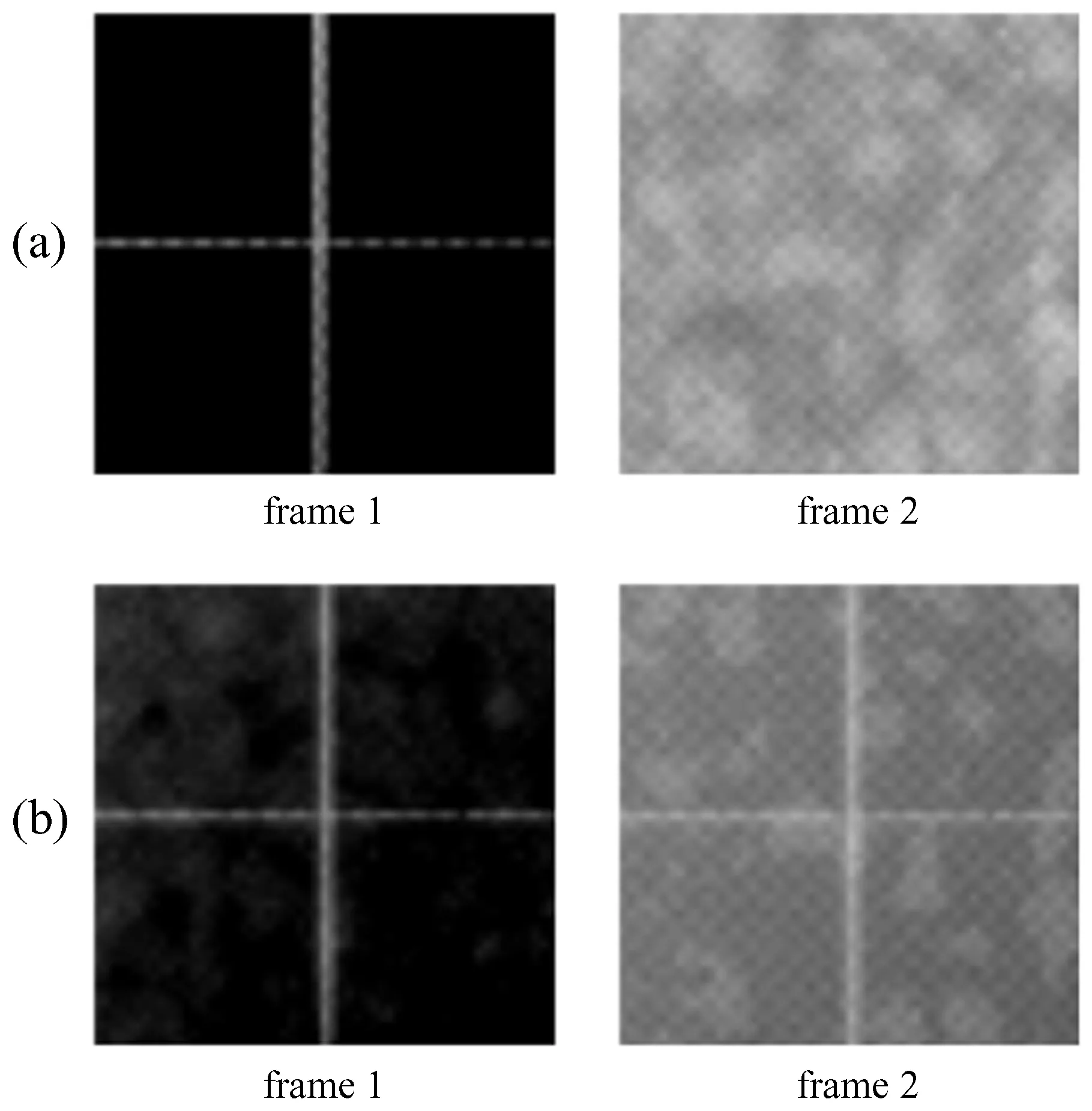
图3 实验采集的灰度图。(a)数字微镜阵列与相机同步;(b)数字微镜阵列与相机异步
在实验中,通过编程使数字微镜阵列在完成每帧灰度图所对应的第1张二值图显示后,输出一个电脉冲信号作为相机的同步触发信号。相机以沿触发的方式检测到这个同步触发信号后开始曝光,曝光时间根据灰度图显示时长设置。测试结果如图3(a),相机采集的对应灰度图上未观测到错帧的情况,证明了同步的有效性。
1.2 图像预处理
使用Hinode太阳光学望远镜(Solar Optical Telescope, SOT)于2007年3月2日获得的一组分辨率为1 024 × 1 024 pixel的太阳图像数据,选用G波段中心波长为430.5 nm、时间间隔约16 s的图像序列,用太阳光学望远镜团队提供的标准数据处理程序进行暗场、平场校正及坏像素移除。
为使得系统视场内有10个左右的米粒组织,将图像截取指定区域后,适当缩小尺寸,得到分辨率为64 × 64 pixel的图像,如图4。先将16 bit的图像重新量化,然后按位分解[9]为二值图,加载到数字微镜阵列控制系统的内存中。完成灰度图像的采集后,对模拟图像进行暗场、平场、去趋势项的处理[10-11]。
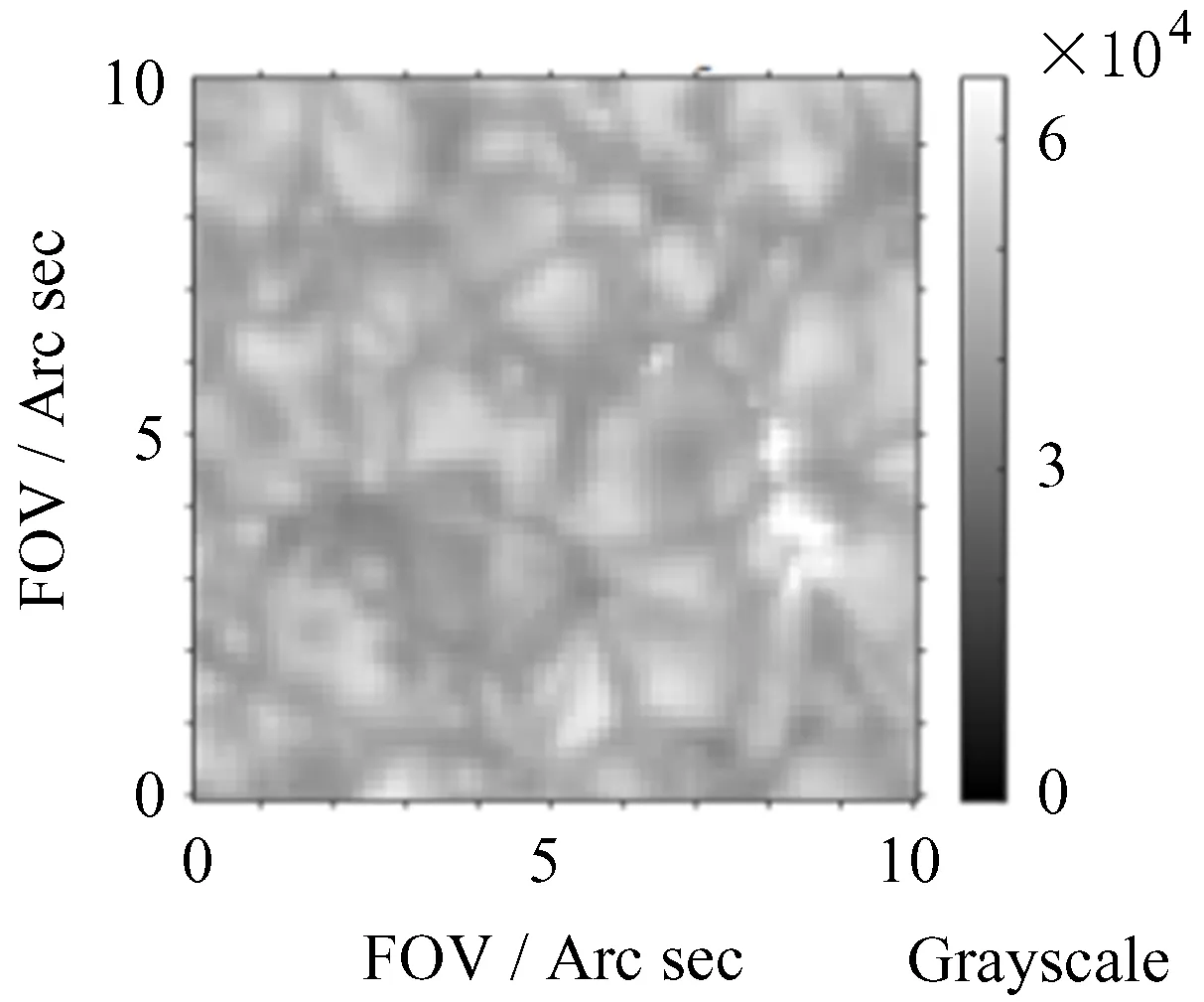
图4 16 bit太阳米粒组织图像Fig.4 16 bit image of the solar granulation
2 目标模拟实验
截取Hinode太阳米粒组织图像中的不同区域,得到18幅小图,根据目标种类的不同可分为两类:(1)仅含太阳米粒组织的图像(图5(a));(2)含黑子半影、本影的米粒组织图像(图5(b))。用包含这些区域的图像序列,模拟出18组显示时长为20 min的随时间不断演化的动态目标。

图5 18组图像序列中的参考图像。(a)仅含米粒组织的图像;(b)含黑子和米粒组织的图像
2.1 不同目标、不同显示灰度级对模拟效果的影响
改变18组图像序列的显示位深度,对模拟效果进行研究。统计结果表明,18组图像的相关系数值随量化位数的变化规律具有一致性。从两种类型的图像中各选出一幅(仅含米粒组织的③和含有黑子的)进行说明。随着量化位数由3 bit逐渐增加到8 bit,两组目标的实际图像如图6(a),(c),模拟图像如图6(b),(d)。受原始图像的分辨率、对比度等限制,当量化位数大于5 bit时,模拟图像的纹理和清晰度不再随着位深度的增加而有明显变化。

图6 不同位深度的图像。(a)实际图像③;(b)模拟图像③;(c)实际图像;(b)模拟图像
太阳观测中通常以图像序列的相关系数值作为衡量动态目标随时间演化特性的指标,根据相关系数的衰减情况能够判断需要更换参考图像的时间点,从而更换望远镜系统的观测目标区域。对模拟图像序列进行相关计算:
(1)
其中,I1为参考图像;In为活动图像;M,N为图像沿横向、纵向的像素个数;
用模拟图像与实际图像的相关系数差值作为衡量模拟效果的指标之一,计算公式如下:
ΔC1n=CS1n-CA1n,
(2)
其中,CS1n,CA1n分别为模拟图像序列、实际图像序列的相关系数值。
作不同位深度的实验模拟图像的相关系数值及其与实际值的差值曲线,如图7。观察图7发现,随着图像灰度等级由3 bit到5 bit递增,相关系数依次增大,差值依次减小,即模拟图像的效果不断优化,且优化速率逐渐减小;当灰度等级增加到6 bit时,相关系数及差值不再有明显的变化,优化速率趋近于0。对比曲线可知,含黑子的图像相关系数曲线随不同位深度的变化趋势与仅含米粒组织的图像相同,但其相关系数模拟值与实际值的差值是仅含米粒组织图像的1/4。这说明:(1)对于不同种类的目标,量化位数对模拟效果的影响规律是一样的;(2)目标特征越明显,模拟效果越好。
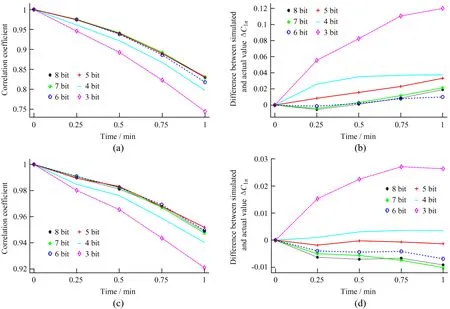
图7 不同显示位深度的相关系数曲线。(a)图像③的实验模拟相关系数曲线;(b)图像③的模拟与实际的相关系数差值曲线;(c)图像的实验模拟相关系数曲线;(d)图像的模拟与实际的相关系数差值曲线
对于不同的目标,由图8可以看出,仅含米粒组织的图像、含黑子的图像、含黑子本影的图像的相关系数值依次增大。对于米粒组织图像序列,当相关系数值下降到0.8时[12],稳像系统应考虑更换参考图。由图8中曲线的变化趋势可知,当目标全部为米粒组织时,0.6~1.1 min时相关系数值下降至0.8;当目标图像含黑子半影时,约1.8~3.1 min需考虑更换参考图;当目标图像包含黑子本影时,换图时间为4.5~6 min。太阳黑子的存在时间比米粒组织长,图像序列的相关系数值较大,因此,换图的时间相应延长,实验模拟结果符合真实情况。在用天文望远镜进行太阳观测时,实际更换观测目标区域的时间约为1 min,这与实验结果相近。

图8 不同目标图像的相关系数曲线Fig.8 Correlation coefficient curves for images of different sources
由实验模拟图像与实际图像的相关系数差值曲线图9可知:(1)有黑子的图像差值较小,即图像时变特性的模拟更接近于真实效果。(2)对于仅含米粒组织的图像,所含的较明亮区域所占比例越大,模拟效果越真实。(3)由于太阳黑子的对比度高,对于含黑子的图像,在1 min内差值的绝对值均小于8%,实验模拟结果与实际图像更为接近;对于仅含米粒组织的图像,对比度较低,差值均较大,即用低对比度图像进行目标模拟的真实度相对较低。
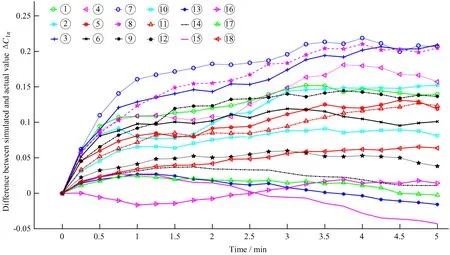
图9 不同目标图像的模拟与实际的相关系数差值曲线Fig.9 Difference between simulated and actual correlation coefficients for images of different sources
综合上述讨论可知:(1)利用数字微镜阵列在实验室显示位深度为3 bit的动态目标能有效模拟观测目标的时变特性;(2)相比于量化位数,图像目标是决定模拟效果的主要因素;(3)对于空间或地基天文望远镜拍摄的低对比度、低清晰度的太阳米粒组织图像,适当提高灰度级能够更真实地模拟目标的时变特性。
2.2 不同帧频对模拟结果的影响
实验中,数字微镜阵列显示3 bit灰度图的帧频范围为2 000~2 800 frame/s。在相机帧频分别为2 000 frame/s,2 400 frame/s,2 800 frame/s时,对18组图像进行采集,结果表明,所有图像序列的相关系数值随帧频的变化表现出相同的规律。以序号③的目标图像为例进行说明,图10为其相关系数值-帧频曲线,在各帧频段选取两个实验值。从曲线整体来看,数字微镜阵列的显示频率即相机的采集帧频越大,相关系数值越大。曲线趋势在部分时间段有所变化,这是由采集时的系统误差引起的。
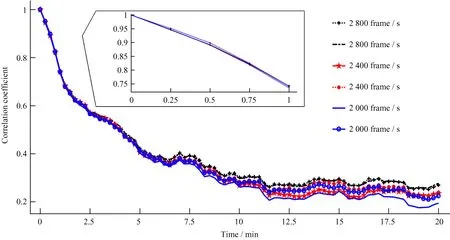
图10 不同采集帧频的图像相关系数曲线Fig.10 Correlation coefficient curves for images of different frame rates
由2.1节的结果知,系统更换参考图的时间为1 min左右,而帧频在2 000~2 800 frame/s变化时,1 min处对应的图像相关系数值的波动小于1.2%。这是因为亚毫秒量级的采样周期远小于分钟量级的太阳结构演化寿命,在1 min内,亚毫秒量级的采样周期的变动对于持续时间较长的演化过程影响不大。因此在本系统中,帧频变化对于模拟动态目标演化特性的影响较小。
2.3 其他米粒组织图像的成像研究
使用大熊湖太阳天文台(Big Bear Solar Observatory, BBSO)的1.6 m太阳望远镜于2010年8月3日采集的时间间隔为10 s的图像对实验进行验证,该序列图像仅含米粒组织。用上述方法对图像进行处理、显示与采集,得到图11的相关系数实验模拟与实际值的曲线。模拟值与实际值在1 min时相差7.5%,相关系数值在约1.1 min时下降到0.8,这与Hinode仅含米粒组织的图像采集计算结果相近。
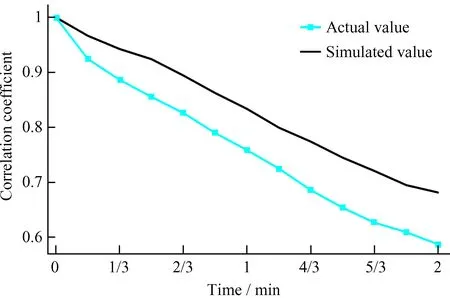
图11 大熊湖太阳天文台的米粒组织图像相关系数曲线
3 总 结
本文介绍了一种高帧频的目标模拟方法,能够有效模拟动态目标的时变特性。建立了基于数字微镜阵列的相关跟踪稳像系统,在高于2 000 frame/s的帧频下进行实验,结果如下:(1)图像目标种类是模拟效果的主要影响因素,量化位数、帧频对结果的影响程度依次减小;(2)目标特征越明显,模拟效果越好;(3)对于低对比度、低清晰度的图像,适当提高灰度级能够更真实地模拟动态目标的时变特性。
实验结果显示,在感兴趣的时间范围内,实验模拟的时变目标图像序列与原始图像序列的相关系数曲线较吻合,在进行太阳观测时的实际情况对目标演化特性模拟的有效性进行了验证。因此,使用数字微镜阵列显示动态图像能较为真实地模拟观测目标的时变特性,满足相关跟踪稳像系统实验室开发的需要。
