量子科学实验光学地面站综合控制系统设计与开发*
2020-07-24田健峰姜晓军王汇娟王建峰李凤芝
兀 颖,葛 亮,田健峰,姜晓军,王汇娟,王建峰,贺 东,李凤芝
(1. 中国科学院光学天文重点实验室 (国家天文台),北京 100101;2.中国科学院大学,北京 100049;3. 中国科学院光电技术研究所,四川 成都 610209;4. 中国科学技术大学,安徽 合肥 230026)
传统的量子通信是基于光纤,受限于光纤的固有损耗,基于光纤的量子通信传输距离难以突破百公里量级。因此,科学家将目光投向了自由空间,借助卫星平台,构建卫星与地面远距离量子科学实验平台,实现更远距离的量子通信[1]。2011年由中国科学技术大学牵头提出并策划的 “量子科学实验卫星” 项目正式立项,2016年8月16日 “墨子号” 量子科学实验卫星发射成功[1]。量子科学实验卫星项目在中国科学院空间科学战略性先导科技专项的支持下完成了一系列具有国际领先水平的科学实验,取得了具有高显示度的科学成果[2-3]。
卫星与地面远距离量子科学实验平台主要由 “墨子号” 和量子科学实验卫星——科学应用系统(简称量子科学应用系统)组成。量子科学应用系统由1个中心和5个测站(4个量子科学实验光学地面站和1个量子隐形传态光学地面站)组成[4]。为了充分利用我国广袤的地域,延长单轨可观测时间,量子科学实验光学地面站的地理分布跨度较大,同时,超过1 200 km的量子纠缠分发实验[3]需要多个量子科学实验光学地面站的协同工作。为了便于量子科学实验中心高效稳定地调度量子科学实验光学地面站进行实验,需要建立统一的地面站综合控制系统。考虑到以下因素:(1)量子科学实验光学地面站设备较多且有多层次的功能需求;(2)用于捕获、跟踪和瞄准的望远镜和用于数据采集的量子终端都是专门研制的设备,不具备通用控制接口;(3)现有望远镜控制系统(ASCOM, RTS2)[5-7]无法满足地面站综合控制系统的需求。因此,专门设计开发了量子科学实验光学地面站综合控制系统,实现对量子科学实验光学地面站的综合控制。
1 系统设计
1.1 总体设计
地面站综合控制系统作为4个量子科学实验光学地面站的统一控制平台,需要完成科学数据的发布、内外数据的交互、实验计划的解析执行、环境信息和设备状态信息的监测和发布等功能。地面站综合控制系统在功能上有多层次要求,针对这一特点,对不同层次的需求进行分割,采用分层设计的方式和自顶向下的设计原则进行系统架构设计,通过网络通信接口实现耦合,使整个系统构架灵活,易于维护。
地面站综合控制系统由网络服务层、网络交互层和设备控制层构成,如图1。网络服务层提供实验状态信息和气象数据的访问;网络交互层主要实现实验计划的内外交互、内部各组件之间数据的交互、实验监测数据及环境数据的入库;设备控制层对实验计划进行解析并执行,同时采集实验数据和设备状态数据。为了便于开发,将整个地面站综合控制系统划分为以下相互松耦合的4个模块:(1)网页显示模块、(2)网络通信服务模块、(3)主控模块、(4)环境监测和视频监控模块,各模块之间通过网络通信接口实现耦合。
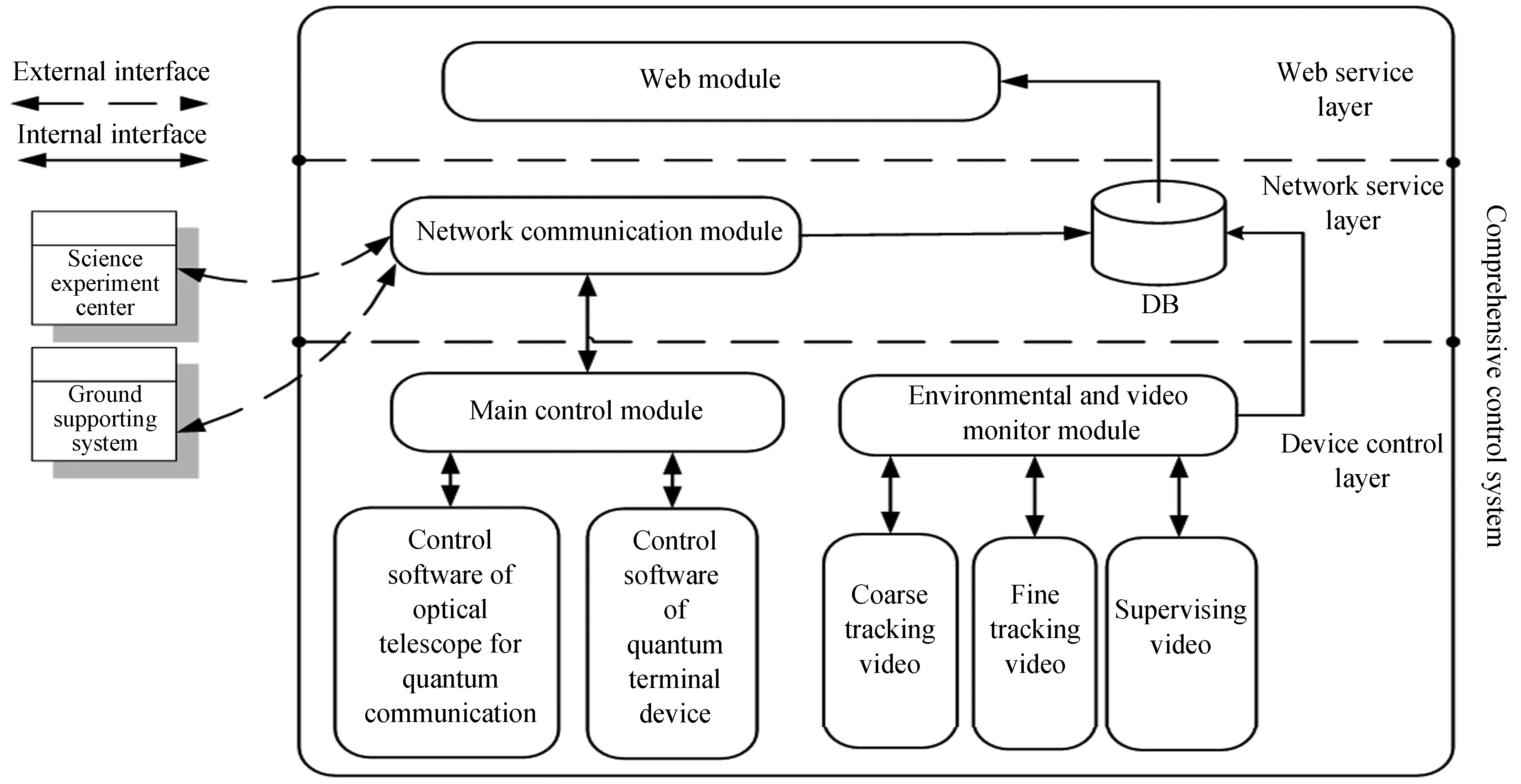
图1 地面站综合控制系统软件架构图Fig.1 System architecture of comprehensive control system for the quantum science experimental optical ground station
4个量子科学实验光学地面站之间相距较远,为了保障量子科学卫星项目的顺利进行,量子科学实验中心开通了量子专网,将量子科学实验卫星项目中涉及的各个量子科学实验光学地面站和实验节点都纳入量子专网。在单个量子科学实验光学地面站的网络布局设计中,考虑到如果将量子科学实验光学地面站的所有设备控制计算机均接入量子专网,不仅在安全上存在隐患,而且大量数据的传输会给网络带来压力,针对这个问题,地面站综合控制系统的网络布局采用内外网隔离的方式,用于网页发布和外部数据交互的网络通信服务器作为对外的一个通信节点,对外连接量子专线,对内连接内部网络,实现内外数据的交互。设备层的控制主机(综合控制主机、望远镜子系统主机、量子主机、环境监测系统主机)均布局在内部网络里,分配固定IP,确保数据传输的速率和安全性。
1.2 网页显示模块
科学实验中心需要监测各个量子科学实验光学地面站的实验进度、设备状态和气象条件,以便更加及时高效地安排实验计划。为了方便用户浏览信息,设计开发了网页显示模块。网页采用ASP.NET开发,数据库采用MYSQL,采用单网页模式,实现在一个界面上显示全部信息。网页显示内容如表1,主要包含实验状态和设备状态等。

表1 网页显示信息要素Table 1 Essential elements for displaying
1.3 网络服务模块
地面站综合控制系统作为量子科学实验光学地面站的统一服务平台,负责内外数据的交互。针对这一需求,设计开发了网络服务模块,对外负责与量子科学实验中心及地面支撑系统的数据交互;对内负责内部各控制组件之间的数据交互。
为满足不同数据类型和不同功能的数据交互,将网络服务模块划分为以下组件:(1)FTP服务器主要用于接收量子科学实验中心发来的实验计划,反馈实验数据到量子科学实验中心;(2)数据库用于存储设备的状态信息、测站环境信息、实验信息等;(3)网络协议接口用于内部各模块之间和内外部模块之间的数据交互。
如图2,量子科学实验中心通过FTP服务器发送实验计划,主控程序的控制模块解析实验计划,通过主控软件与终端设备之间网络通信协议,发送控制命令,控制终端设备执行实验计划,同时,主控软件的数据采集模块采集设备参数及状态数据写入数据库。气象数据通过与数据库之间的网络协议写入数据库。实验数据通过FTP服务器反馈至量子科学实验中心。实时监测显示数据通过主控数据采集模块与地面支撑系统之间的网络接口发送至地面支撑系统。
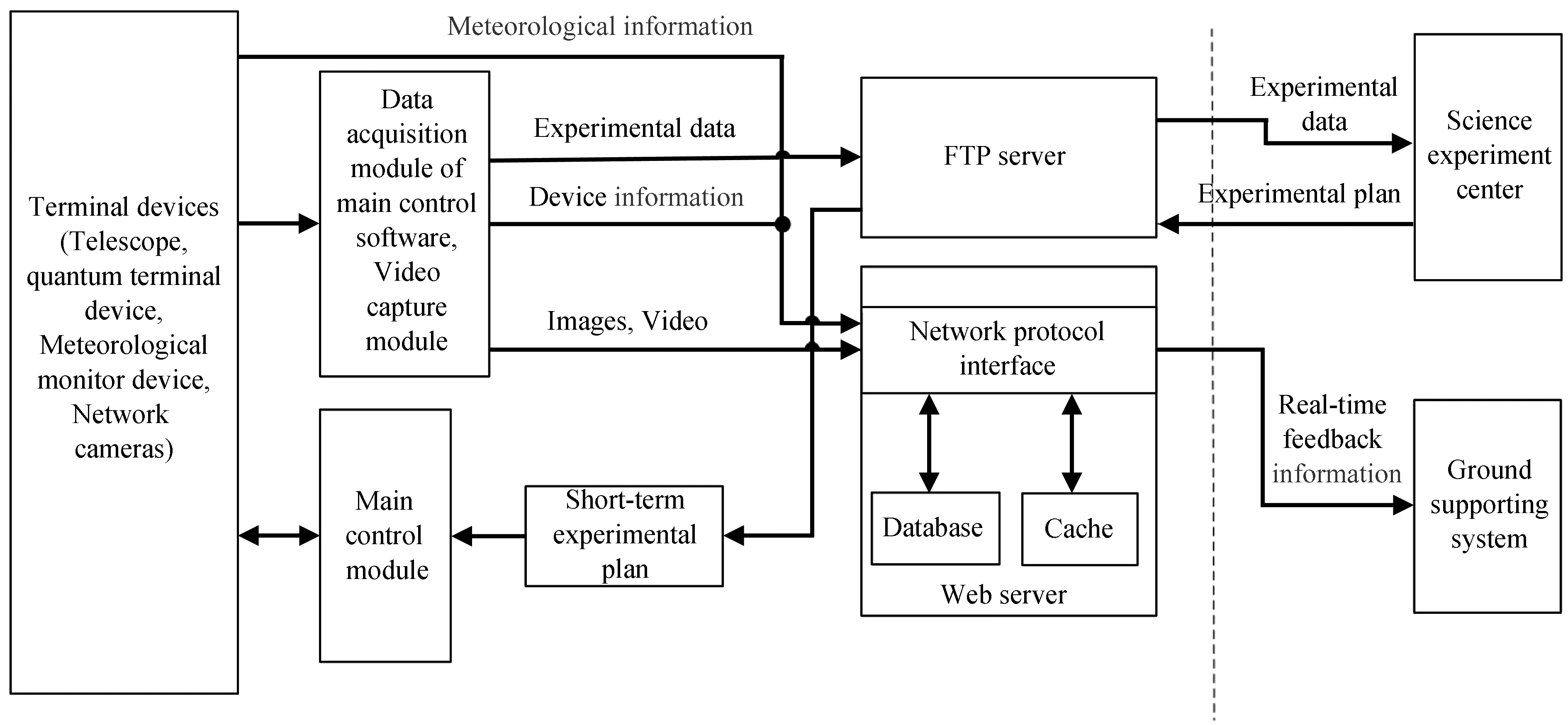
图2 地面站综合控制系统数据流图Fig.2 Data flow diagrams of the comprehensive control system
1.4 主控模块
主控模块是地面站综合控制系统的核心部分,主要负责实验计划的解析执行。量子科学实验光学地面站的硬件包括量子光通信望远镜[8-9]、量子终端和环境监测设备,在硬件组成上和天文望远镜系统比较相似。因此,主控模块的设计采用观测控制软件(Observing Control Software, OCS)的设计思想,将整个模块分为设备控制层和观测策略控制层。设备控制层由量子光通信望远镜控制软件和量子终端控制软件构成,量子光通信望远镜控制软件(成都光电技术研究所研制)负责观测目标的捕获、跟踪和瞄准控制,量子终端控制软件(中国科学技术大学研制)负责量子终端设备的控制。在这些设备控制软件的基础上,分别制定了 《量子科学实验光学地面站望远镜对外接口》 和 《量子科学实验光学地面站量子通信终端对外接口》。主控软件通过这些网络通信接口对设备进行调度,完成量子科学实验卫星项目科学实验(简称量子科学实验)的流程控制。
设备层和主控软件之间的通信采用单链路全双工模式,命令控制数据流和状态反馈数据流的传输相互独立,各使用一条通信链路。设备控制端(量子光通信望远镜控制软件、量子终端控制软件)以固定频率向主控软件推送反馈状态帧,主控软件解析反馈状态帧确定设备状态,进行流程控制。
“墨子号” 是一颗低轨道卫星,运行速度较快,需要以较高频率对量子光通信望远镜进行位置和速度的控制。如果由主控软件进行轨道跟踪控制,由于网络通信频率和网络通信延迟的影响,无法实现高频率、高精度的跟踪控制。因此,在本设计中,由量子光通信望远镜控制软件负责轨道跟踪控制。主控软件流程如图3,主控软件提前将轨道数据转换为测站坐标系下的时间位置序列,发送给量子光通信望远镜控制软件。同时,为了提高效率,任务开始前,主控软件控制量子光通信望远镜运动到轨道序列的第1个位置,等待任务开始便进行轨道跟踪。
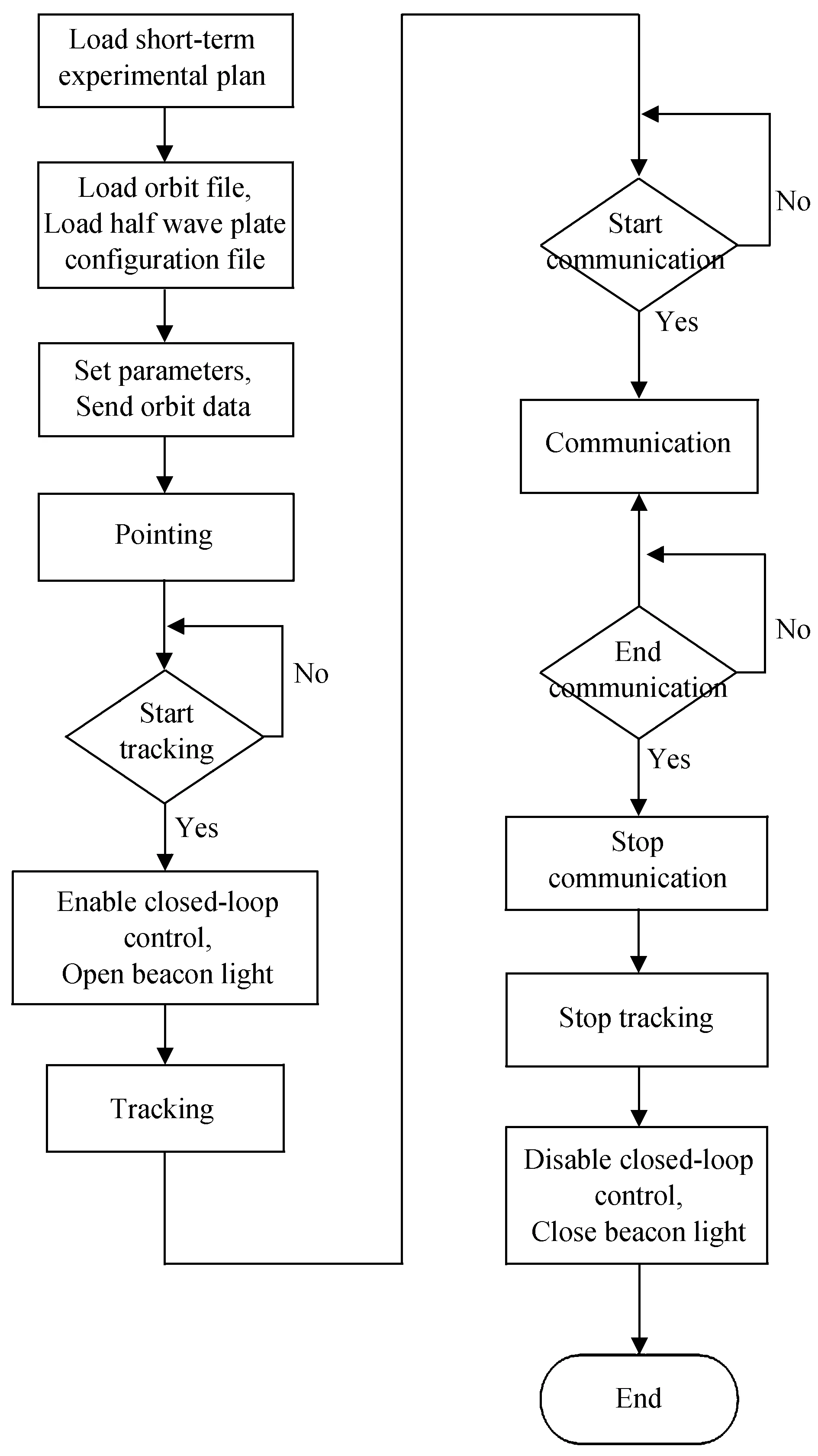
图3 主控软件流程图Fig.3 Flowchart of the main control software
1.5 环境监测和视频监控模块
环境监测和视频监控模块是地面站综合控制系统的辅助模块,为实验计划的顺利执行提供保障。测站环境信息是实验计划制定和调整的重要参考信息,同时也为实验结果的分析提供参考。环境监测设备如图4,由云量相机和气象站组成,负责测量和记录地面站的环境参数,采集的信息要素如表2,主要包括云量、温度、湿度、风速、风向等。在环境监测设备建设初期,由于云量相机和气象站距离控制室较远,采用传输延长线的方式进行长距离传输,但在实际应用中会出现设备与采集电脑通信不稳定的情况,造成数据采集不完整。经过测试分析,发现是由于控制计算机和采集设备之间延长线过长引起通信不稳定。于是对相关系统进行了升级,新的系统采用ARM单片机完成对全天相机和气象站的控制及数据采集工作,采集结果通过网络接口发给服务器上的数据接收程序,数据接收程序对接收文件进行存储[10],在使用过程中故障率显著降低。

表2 气象站采集信息要素Table 2 Essential elements of meteorological monitor

图4 环境监测设备Fig.4 Meteorological monitoring instruments
视频监控部分主要包括环境视频监控、粗跟踪相机视频和精跟踪相机视频(简称粗精跟踪相机视频)。通过摄像头采集实时监控视频和粗精跟踪相机视频,传输到硬盘录像机,存储到网络硬盘,并通过网络发布到量子专网。视频监控模块为实验过程的回溯提供了材料,为事后实验结果分析提供参考。
2 系统测试与运行
为了保障 “墨子号” 发射后星地量子通信光链路的顺利建立,地面站综合控制系统设计完成后,对其进行分阶段的系统测试。
系统测试分为实验室测试、低轨道卫星模拟测试、在轨阶段测试3个阶段。系统设计完成后首先进行实验室模拟测试,实验室模拟测试阶段主要完成了各模块的功能测试和模拟实验流程测试,测试项目和结果如表3。为了保证 “墨子号” 发射后星地对接的顺利进行,需要在实验室测试完成后对软件进行实验流程测试,由于 “墨子号” 未发射,无法进行实际观测。为了尽可能模拟实际观测情况,选择跟踪低轨道卫星进行模拟测试。低轨道卫星模拟测试阶段,将地面站综合控制系统配备到4个量子科学实验光学地面站,通过跟踪低轨道卫星对地面站综合控制系统进行实验流程测试,经过充分测试,地面站综合控制系统服务于发射前4个量子科学实验光学地面站的实验测试工作。“墨子号” 发射后进入在轨测试阶段,实际跟踪 “墨子号” 对地面站综合控制系统进行测试。在轨测试阶段,兴隆量子科学实验光学地面站最先与 “墨子号” 成功对接,随后各个量子科学实验光学地面站也成功地与 “墨子号” 完成对接。在4个量子科学实验光学地面站均成功与 “墨子号” 对接后,地面站综合控制系统进入常规运行阶段。
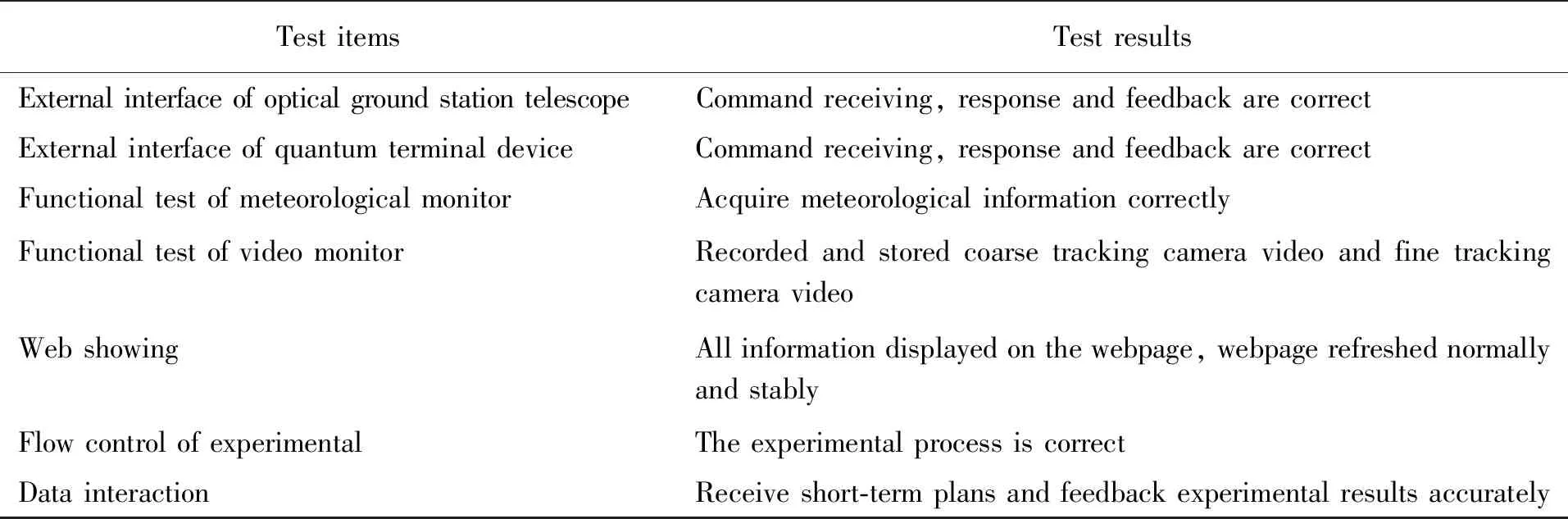
表3 测试项目及结果Table 3 Test items and results
图5和图6分别为常规运行阶段的网络显示页面和主控软件界面。网络页面可实时显示实验信息、环境信息和监控视频信息。主控软件实现了实验计划的解析和执行、实验数据和设备状态的采集记录,同时具备恒星观测功能。
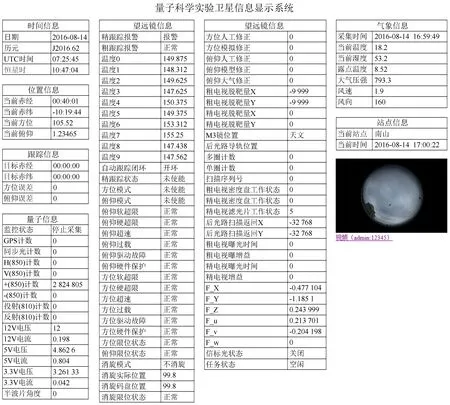
图5 网络页面Fig.5 Web page

图6 主控软件界面Fig.6 GUI of the main control software
3 总结与展望
设计完成的地面站综合控制系统实现了量子科学实验光学地面站的自动化控制,观测人员经过简单培训即可胜任观测任务。地面站综合控制系统分别配置到4个量子科学实验光学地面站,服务于星地高速量子密钥分发实验[2]和超过1 200 km的量子纠缠分发实验[3],顺利完成在量子科学实验卫星项目中的任务。地面站综合控制系统中的环境监测模块,目前是独立于观测控制系统,在天气发生突发变化时,尚不具备自动调整实验计划的功能。在未来工作中,计划基于气象信息动态调整观测计划,从而实现高度自动化的观测控制,进一步提高观测效率。
