无人机中继测控数据链设计
2020-07-23杨晨
杨晨


摘 要: 目前无人机测控数据链多为无线视距传输,在山区等有障碍物遮挡的环境中往往工作受限。针对此种情况,首先介绍一种直通模式数据链的设计方案,并基于此种构架设计出一种中继模式的测控数据链系统。此系统搭载于无人机上,可实现中继无人机与任务机终端,以及中继无人机与地面站终端的双向实时通信,进而完成地面与任务终端之间测控通信链路的建立。系统采用中继前向链路与返向链路频率倒置的频分双工体制,简化了射频前端与天线的设计。此中继链路方案克服了微波视距传输的局限,有效拓展了测控通信距离,应用灵活、兼容性好、可靠性高,为复杂环境中的无人机应用提供了一种通信链路解决方案。
关键词: 数据链设计; 中继通信; 无人机; 系統设计; 双向通信; 通信建立
中图分类号: TN83?34 文献标识码: A 文章编号: 1004?373X(2020)14?0109?05
Design of relay telemetry and control data link for UAV
YANG Chen1,2
(1. Tianjin Aerospace Zhongwei Data System Technology Co., Ltd., Tianjin 300301, China; 2. Space Star Technology Co., Ltd., Beijing 100080, China)
Abstract: At present, most of UAV telemetry and control date links are the wireless line?of?sight transmission, its operation is often limited in mountainous areas and other environments with obstacles. In view of this situation, a design scheme of data link in direct connection mode is introduced, and then a telemetry and control data link system in relay mode is designed according to the design scheme. This system mounted on the UAV can realize two?way real?time communication between relay UAV and mission UAV terminal, and between relay UAV and ground station terminal, and then the establishment of telemetry and control communication data link between ground and mission UAV terminal is completed. The frequency division duplex system with frequency inversion of relay forward link and backward link is adopted in the system, which simplifies the design of radio frequency front end and antenna. This relay link scheme can overcome the limitation of microwave line?of?sight transmission, can effectively expand the distance of telemetry and control communication, and has flexible application, excellent compatibility and reliability. It provides a communication link solution for the UAV applications in the complex environment.
Keywords: data link design; relay communication; UAV; system design; two?way communication; communication establishment
0 引 言
近年来随着我国科技水平的不断提升,无人机已经在探测、运输、减灾、反恐、防火、救援等多个领域得到广泛应用。尤其对于电力线路、石油管道的巡检,相比于人工巡线,无人机在工作效率、运营成本、准确性及安全性上都有极大的优势。测控数据链[1]作为无人机系统里的核心部件,其承担了无人机与地面测控终端的双向通信,保证了地面控制指令的上传以及无人机遥测与载荷数据的下传。目前的无人机系统测控数据链多为视距传输,在山区、丘陵等存在障碍物遮挡的非视距环境中视距直通数据链无法正常工作,而电网线路、石油管道等行业的工作环境往往较为复杂。因此,在地面交通不便和任务区域多变的条件下,克服区域内障碍物对通视条件的影响,设计开发中继数据链系统,扩展空地传输距离,对无人机在复杂环境中的应用有着十分重要的意义。
1 直通模式数据链
直通模式数据链是中继模式数据链的基础,中继模式数据链可通过对直通模式数据链的改造和优化而成。因此研制性能指标优良且体积小重量轻的直通型数据链是开发中继数据链的必要前提。
1.1 系统组成
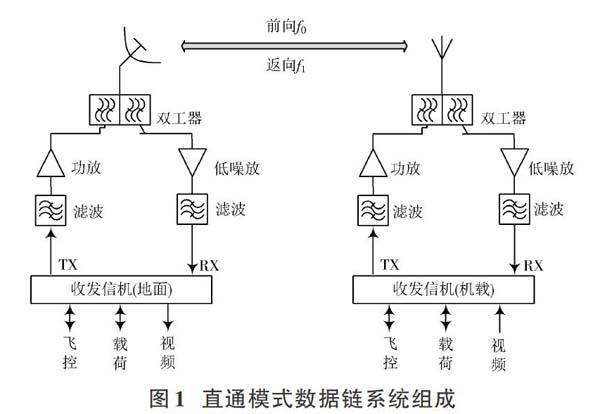
直通模式数据链系统[2]组成如图1所示。系统采用FDD工作模式,前向链路工作于频率f0,返向链路工作于频率f1,由双工器完成对收发通道的分离及天线共用,实现了地面对无人机及其挂载载荷的上行控制以及机载遥测与载荷信息的实时回传。
机载测控数据链工作原理如下:机载收发信机对采集到的视频图像、载荷信息以及飞控遥测信息等数据进行组帧、编码、扩频、调制后得到中频信号,经上变频处理后将中频信号搬移至射频载波,对其进行必要的滤波处理后送入射频前端,功率放大后经天线进行发射;同时,对于地面发射的上行控制指令信号经天线接收后,由射频前端低噪声放大器放大及滤波处理,并进行下变频至中频,而后通过解扩、解调、译码等处理实现对上行指令的解析。地面端采用了与机载端相同的设计,其工作原理与机载设备基本相同,不再赘述。
1.2 链路设计
工作频率选择L频段,且避开GPS及移动通信的工作频率,以减少对机载GPS设备的干扰,也避免移动通信基站对无人机数据链的干扰。
1.2.1 发射通道设计
基带部分选择使用ADI公司的高集成度正交调制器芯片AD5375,完成对DAC产生的两路IQ信号的正交调制。射频前端使用两级放大器级联,预放采用ADI公司的单片放大器ADL5542,末级放大器采用TriQuint公司的高线性度功放芯片AH323,其在L频段的射频输出功率可达到2 W。发射通道链路仿真设计如图2所示。
由于采用FDD的双工方式,射频输出端使用了双工器来分离收发通道,为了达到小型化的要求,双工器并未采用腔体形式,而是使用了体积较小的介质形式,而介质双工器在插损指标上会略有不足,按1.5 dB的损耗设计,由链路仿真结果可见,最终输出射频功率可达31 dBm,OIP3可达46 dBm。
1.2.2 接收通道设计
接收通道前端选用了Mini公司的低噪放芯片CMA?545,其在L频段拥有30 dB以上的增益,且噪声系数仅为1 dB,另外其最大输入不损坏功率达到了25 dBm,保证了接收大功率信号时前端不烧毁,而不必在低噪放前加入限幅器予以保护,从而优化了接收通道信噪比。
基带部分使用了凌力尔特公司的一体化接收芯片LTM9005,其集成了混频器、中频放大器、声表滤波器以及14位125 MHz采样率ADC ,可实现L频段射频信号的下变频与模数转换,大幅缩减了收发信机的尺寸,实现机载设备的高度集成化。接收通道链路仿真结果如图3所示。
与发射通道相似,由于双工器的插损,会使接收通道的级联噪声系数有所增加。由仿真结果可见,整个接收链路的噪声系数大约为3 dB。
1.2.3 链路预算
考虑到无人机测控数据链的应用特点,上行链路选择卷积信道编码与BPSK调制方式,以获得较低的处理时延及链路可靠性,而下行链路选用LDPC信道编码与QPSK调制方式,以获得更大的编码增益与更高的带宽利用率。双向传输使用频分双工体制,上行载波f0选择1.4 GHz工作频率,下行载波f1选择1.6 GHz工作频率,射频前端使用1 W发射功率,收发端均选用0 dB单极子全向天线,数据传输速率设定为下行4 Mb/s与上行51.2 kHz,链路预算结果如表1所示。由计算结果可见在视距传输情况下,本设计可实现10 km的传输距离,且下行高速数据与上行低速数据尚有8.8 dB与25 dB的链路余量。由于上行遥控数据速率远低于下行复合数据,因此上行传输余量也远高于下行,可保证无人机的可靠性与安全性。本设计可满足大部分应用需求,如有远距离作业需要,可选择高增益天线与大功率前端进行升级即可。
2 中继模式数据链
当传输路径中存在障碍物遮挡,破坏了无线链路的视距通视条件,直通数据链将无法正常工作。当前无人机的应用中,比如电网[3]、石油管道等的巡检任务,其工作环境往往就存在山区、丘陵等障碍物的影响,因此,要实现远程无人机的超视距测控和信息传输,需开发中继模式数据链。
2.1 中继模式选择
2.1.1 卫星中继
卫星中继系统[4]如图4所示,使用地球同步轨道卫星进行中继传输,只需在卫星天线的波束覆盖范围内,通信可不受地理条件与距离限制。其缺点是需要增加一套机载卫通设备,对无人机载荷能力有更高的要求,且卫星信道容量有限,对信息传输速率会有所限制。通过卫星转发,其信号传输距离长,造成通信延时增加,再者卫星信道的租用也提升了后期运营成本。
2.1.2 塔架中继
塔架中继系统如图5所示,需在障碍物间建立中继信号塔进行双向通信,类似于移动通信中的无线基站。由于中继塔架与地面指控站以及无人机之间仍依靠视距传输,因此要选择合适位置,且塔架需达到足够的高度,当更换作业区域时,需提前架设中继塔架设备,后期也需要对其进行维护,实现成本较高。
2.1.3 无人机中继
无人机中继系统如图 6所示。中继设备选择机动性较强的无人机搭载,中继无人机与地面和任务机之间需保持视距直通,在作业时中继无人机可以选择在上空悬停或盘旋。相比于卫星中继与塔架中继,采用无人机中继的方案更加灵活方便,不易受地域的限制,设备相对简化,在前期投入与后期运营的成本上都有較大优势。但是,无人机中继的模式需要同时对两架无人机进行控制,并回传两架无人机的遥测遥感信息,因此需要研制稳定可靠的中继数据链路系统,完成地面、中继、任务三者间的实时双向通信。
