基于多源数据融合的室内定位模型研究
2020-07-23黄婷婷冯锋
黄婷婷 冯锋
摘 要: 目前单一的定位技术无法满足定位过程中越来越高的性能要求,针对这一局限性,提出一种基于多源数据融合的室内定位模型。针对ZigBee定位技术和RFID定位技术,该模型从硬件方面将ZigBee模块与RFID模块进行集成,对采集到的不同类型的数据通过粒子滤波算法进行过滤,从而将不同定位数据结合使用,进一步将不同定位技术的优势结合起来。为了增加定位精准度,在三边定位的基础上提出一种新的定位算法,根据观测节点和参考节点的RSSI值对其分配权值,通过对不同的权值和距离的计算,更精準地确定未知节点的位置。实验结果表明,该模型有效地将多源数据进行融合,优化的定位算法有效地提高了定位的精度,提升了定位系统的整体性能。
关键词: 室内定位; 多源数据融合; 定位模型; 定位算法优化; 未知节点定位; 权值分配
中图分类号: TN820.4?34; TP301.6 文献标识码: A 文章编号: 1004?373X(2020)14?0021?04
Research on indoor positioning model based on multi?source data fusion
HUANG Tingting, FENG Feng
(School of Information Engineering, Ningxia University, Yinchuan 750021, China)
Abstract: As the single positioning technology cannot meet the higher and higher performance requirements in the positioning process, a new indoor positioning model based on multi?source data fusion is proposed for this limitation. In allusion to the ZigBee positioning technology and RFID positioning technology, the ZigBee module and RFID module are integrated into the model in the hardware aspect, and the different types of the collected data are filtered by means of the particle filter algorithm, so that the different positioning data can be used in combination and the advantages of different positioning techniques are combined further. A new localization algorithm is proposed on the basis of the trilateral localization to increase the accuracy of localization. The weights of observation nodes and reference nodes are assigned according to their RSSI values, and the positions of unknown nodes are determined more accurately by calculating the different weights and distances. The experimental results show that the model can effectively fuse the multi?source data, and the optimized localization algorithm can effectively improve the positioning accuracy and promote the overall performance of the positioning system.
Keywords: indoor positioning; multi?source data fusion; positioning model; positioning algorithm optimization; unkhown node localization; weight allocation
0 引 言
伴随物联网的发展,人们对于室内定位的需求也越来越多。目前常见的定位技术有:基于WiFi的定位技术、基于红外线的定位技术、基于超声波的定位技术、基于RFID的定位技术、基于UWB的定位技术、基于ZigBee的定位技术和基于蓝牙的室内定位技术等[1?4]。但这些定位技术都是单一信源定位,存在一定的局限性,最大的缺陷是不能满足高精度、低成本和普适性等多性能兼顾的需求。而将多种定位数据进行融合的多信源定位可以弥补单一信源定位所存在的不足,将每种定位技术的优势结合起来,从而提升定位系统的整体性能[5]。目前存在的定位算法也是多种多样,主要分为基于测距的定位算法和非测距的定位算法[6]。基于测距的定位方法主要依靠测量接收信号强度(Receive Signal Strength Indication,RSSI)[7]、信号到达时间(Time of Arrival,TOA)[8]、信号到达时间差(Time Difference of Arrival,TDOA)[9]或者信号入射角(Angle of Arrival,AOA)[10],来获取节点间的位置关系[11]。非测距的定位算法不用测量节点间的距离或者角度,对于节点硬件方面的要求不高,适用于节点能力有限同时对定位精度要求不高的场合。
针对多源数据融合技术在室内定位中的应用,本文以RFID定位技术与ZigBee定位技术为例,根据二者的特点将其融合起来,同时针对多信源定位模型的特点,在三边定位的基础之上对定位算法加以改进,提出一种基于多源数据融合的室内定位模型。
1 多源数据融合用于定位技术的可行性分析
现存的单信源定位技术各自有各自的优势和劣势,如表1所示。单信源定位都会存在一定程度上的局限性,以RFID室内定位技术和ZigBee室内定位技术为例:传统的RFID定位技术不具有通信能力,抗干扰能力较差,并且目前RFID的通信方式多以有线为主,在一些面积较大且地形较为复杂的环境中,由于布线等问题,RFID的应用受到限制[1?2];ZigBee定位技术在信号传输过程中,受多径效应和移动的影响都很大,并且定位精度取决于信道物理品质、信号源密度、环境和算法的准确性,造成定位软件的成本较高。综合来说,ZigBee技术可以为RFID定位技术提供所需的通信能力,同时,RFID定位技术可以弥补ZigBee定位技术中精确度不高的缺憾。将RFID技术和ZigBee技术相融合,以长补短,将每种不同的定位技术的优势结合起来,可以大幅度提高定位系统的整体性能。
2 定位模型的设计及构建
2.1 模型结构设计
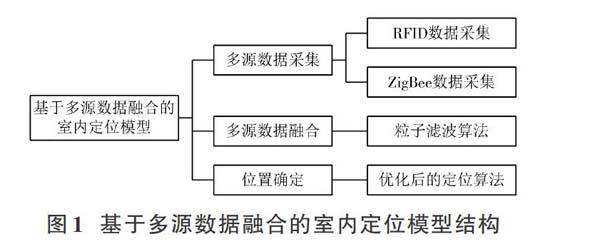
本文提出的基于多源数据融合的定位模型主要分为三大部分:多源数据采集、多源数据融合和位置确定,具体如图1所示。多源数据采集主要针对ZigBee数据和RFID数据,通过对ZigBee模块和RFID模块的集成完成对这两类数据的采集;多源数据融合主要通过粒子滤波算法对这两类异构数据进行过滤,实现不同类型的定位数据的无差别使用;位置确定是定位模型研究的重点,在三边定位的基础之上提出一种新的定位算法,提高定位的精度。
基于多源数据融合的定位模型在硬件方面,主要由待定位节点、观测节点、参考节点、网关和上位机组成,具体的系统框图如图2所示。其中,观测节点由RFID阅读器和ZigBee模块组成,RFID阅读器识别RFID标签并采集RSSI信息,ZigBee模块主要是通过无线的方式将阅读器收集到的信息转发给网关,同时自身也作为一个参考节点。参考节点由ZigBee模块单独构成,相比较观测节点,结构简单,成本较低,更适合大范围布置。待定位节点中集成了RFID标签和ZigBee模块,这里的ZigBee模块是作为一个盲节点存在,主要的功能是接收观测节点和参考节点发来的信息。几个部分相互配合,结合优化后的定位算法,实现对待定位节点的精准定位。RFID/ZigBee融合定位系统框图如图3所示。
2.2 定位模型步骤
从以下7个步骤进行位置估算:
步驟1:根据室内布局,布置观测节点(OP)和参考节点(RP),将观测节点和参考节点的坐标、MAC地址及其节点相互之间的距离储存到数据库中,不同类型的节点分配不同的权值,观测节点权值为[wOP],参考节点权值为[wRP]。
步骤2:待定位节点采集周围参考节点的相关数据,向上位机发送数据,包括距离待定位节点最近的三个参考节点的坐标,以及与这三个参考节点的RFID信号强度和ZigBee信号强度,同时,为方便多源数据的准确使用,采用粒子滤波算法对采集到的RFID数据以及ZigBee数据进行过滤。
步骤3:根据参考节点上传的RFID信号强度和ZigBee信号强度,采用式(1)计算出未知节点与三个已知节点之间的距离。信号强度与距离之间的转换公式:
[RSSI(d)=A-10nlg d] (1)
式中:A为距离为1 m时的信号强度;n为路径损耗系数。
步骤4:以参考节点为圆心,以参考节点的识别距离为半径,参考节点的识别效果如图4所示。根据式(2),可以求得过圆B和圆C的交点[(xbc1,ybc1)],[(xbc2,ybc2)],圆A和圆C的交点[(xac1,yac1)],[(xac2,yac2)],圆A和圆B的交点[(xab1,yab1)],[(xab2,yab2)]。将B和C的两个交点代入距离公式[(x-x1)2+(y-y1)2]比较得出两个交点中距离A更近的一个交点[D(x4,y4)],同理得出,A和C中距离B更近的交点[E(x5,y5)],A和B中距离C更近的交点[F(x6,y6)]。
[di=(x-xi)2+(y-yi)2, i=1,2,3] (2)
步骤5:在点D,E,F构成的三角形中,将三个已知节点A,B,C的RSSI值分别赋值给点D,E,F,具体的赋值情况如表2所示。
步骤6:待定位节点再一次采集周围观测节点的相关数据,重复步骤3)~步骤5),计算出待定位节点的坐标估算值[(xOP,yOP)]。
步骤7:采用式(6)计算出未知节点的最终坐标。
[(x,y)=xRP?wRP+xOP?wOPwRP+wOP,yRP?wRP+yOP?wOPwRP+wOP] (6)
3 实验分析
节点具体分布如图5所示,观测节点AP1~AP6,参考节点P1~P13。由于墙面对于信号的阻碍,会使得信号的损耗较大,导致最终的定位结果偏差较大,因此,在每个隔间的出口处设置一个观测节点进行测量,对于减少信号由于墙面的阻碍导致的信号损耗而引起的误差,是非常有必要的。
本文采用Matlab对传统的三边定位算法和本文提出的算法进行仿真,将室内环境抽象成如图5所示的10 m×10 m的正方形区域,观测节点6个,参考节点13个,未知节点10个。对于最终的定位结果,图6用Matlab仿真出参考节点、盲节点、三边算法定位结果和本文优化的算法定位结果的分布。表3为定位算法坐标对比。表4和图7是对于三边定位和本文优化算法的定位误差的对比,从中可以直观地看出本文提出的优化算法的效果。
表4 定位算法误差比较
[定位算法 平均误差 最大误差 最小误差 三边定位 3.252 7 5.421 2 1.178 5 优化三边定位 1.417 4 4.434 5 0.008 3 ]
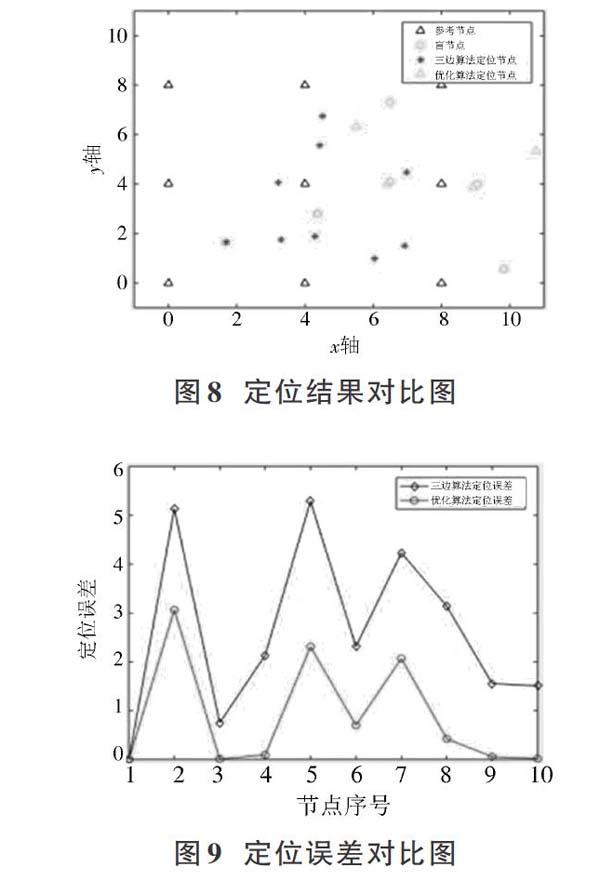
为进一步测试本文算法的一般性,将参考节点均匀分布后再次进行实验。图8和图9为实验的最终效果。可以看出,本文提出的定位算法,参考节点分布越均匀,定位效果更好。
4 结 语
本文提出的基于多源数据融合的室内定位模型,将RFID和ZigBee定位技术相融合,将已知节点分为观测节点和参考节点,对于不同类型的定位节点分配不同的权值,二者同时为未知节点的定位服务,提高了定位的精准度。同时,在三边定位的基础上,优化定位算法。实验结果表明,本文提出的定位算法在精确度方面相比于传统的三边定位有着非常明显的提高。本定位模型有效地将多源数据进行融合,提高了定位的精度,提升了定位系统的整体性能。
参考文献
[1] 严大虎,徐杨杰.融合ZigBee的改进射频识别室内定位算法研究[J].系统仿真学报,2018,30(11):461?468.
[2] 白晋军,邵珠业,燕春,等.改进的LANDMARC算法在ZigBee室内定位中的应用[J].电视技术,2017,41(z1):105?110.
[3] 韦廷廷.基于多源融合的分布式室内定位系统研究与实现[D].北京:北京邮电大学,2018.
[4] 王朔.基于ZigBee的无线传感网络在室内定位系统中的应用研究[D].北京:华北电力大学,2018.
[5] SIM?ES W, SILVA M S, DE LUCENA V. A location technique based on hybrid data fusion used to increase the indoor location accuracy [J]. Procedia computer science, 2017, 113: 368?375.
[6] 吴杰,冯锋,丁志义.基于RFID与WSN融合技术的井下定位算法研究[J].计算机工程与设计,2014,35(7):2278?2282.
[7] RUSLI M E, ALI M, JAMIL N, et al. An improved indoor positioning algorithm based on RSSI?trilateration technique for Internet of Things (IOT) [C]// 2016 International Conference on Computer and Communication Engineering. Kuala Lumpur: IEEE, 2016: 121?130.
[8] 黄智伟.基于TOA测距的室内无线定位方法研究[D].上海:上海海洋大学,2018.
[9] 黄光星,钟炜烽,何铮.TDOA定位性能分析和测试[J].中国无线电,2018(4):43?45.
[10] 孔范增,郭敏,任修坤,等.基于射线跟踪的AOA定位算法的GDOP研究[J].计算机工程与科学,2018,40(1):66?71.
[11] 夏宇声,刘凯,张浩,等.基于多边限定的室内定位方法设计与系统实现[J].计算机工程与应用,2019,55(11):250?256.
