基于AGA?GRNN的三维室内定位研究
2020-07-23马翠红徐天天杨友良
马翠红 徐天天 杨友良


摘 要: 针对传统的测距定位模型容易受到外部因素的干扰,故而降低了定位精度的问题,提出自适应遗传算法广义传播神经网络模型(AGA?GRNN)。引入自适应遗传算法(AGA)用于优化广义回归神经网络(GRNN)的参数,通过AGA?GRNN构建无线信号强度(RSSI)与目标位置之间的关系进行定位,利用对应的映射关系判断目标位置。仿真结果表明,该算法在15 m×15 m×5 m范围内的平均定位误差为26.2 cm。 与GRNN及BP相比,计算精度分别提高了45.4%和53.6% 。同时将AGA优化GRNN三维定位模型与GA优化GRNN三维定位模型的优化时间进行了比较,结果表明,AGA?GRNN的平均定位时间减少了0.5 s,有效地提高了三维定位的精度和效率。
关键词: 三维定位模型; 室内定位; AGA?GRNN; 射频识别; 目标位置; 仿真实验
中图分类号: TN976?34; TP391.9 文献标识码: A 文章编号: 1004?373X(2020)14?0090?04
Research on 3D indoor positioning based on AGA?GRNN
MA Cuihong, XU Tiantian, YANG Youliang
(North China University of Science and Technology, Tangshan 063210, China)
Abstract: In allusion to the traditional ranging and positioning model is easy to be disturbed by the external factors, which reduce the positional accuracy, an adaptive genetic algorithm generalized propagation neural network model (AGA?GRNN) is proposed. The adaptive genetic algorithm (AGA) is introduced to optimize the parameters of generalized propagation neural network (GRNN), and the relationship between received signal strength indicator (RSSI) and target location is established with AGA?GRNN to conduct the positioning. The target position is judged by means of the corresponding mapping relation. The simulation results show that the algorithm′s average positioning error in the range of 15 m×15 m×5 m is 26.2 cm. In comparison with GRNN and BP, the calculation accuracy of this algorithm is increased by 45.4% and 53.6%, respectively. The lengths of optimizing time of the GRNN 3D positioning models optimized with AGA and GA are compared. The results show that the average positioning time of AGA?GRNN is reduced by 0.5 s, which effectively improves the accuracy and efficiency of 3D positioning.
Keywords: 3D positioning model; indoor positioning; AGA?GRNN; radio frequency identification; target location; simulation experiment
0 引 言
当今社会,三维室内定位技术在仓库管理、医疗卫生等众多方面中得到了大量应用。利用射频识别(RFID)技术[1?2]标签和读取器两者之间的接收信号强度(RSSI)来反映目标的空间信息,進而确定目标位置。 由于传统测距方法易被外因因素所干扰而影响定位结果,因此为了改进测距定位算法的缺点,许多研究人员使用具有较好的非线性逼近能力的神经网络定位方法,能较好地解决接收信号强度与目标物体位置间的非线性问题,从而得到了广泛使用。BP神经网络不仅参数较多,优化过程繁琐,而且需要人为不断调试,最终才能得到较为准确的三维室内定位模型,加大了构建预测模型的难度和计算成本[3] 。故选用自适应遗传算法广义回归神经网络定位模型(AGA?GRNN)来完成三维室内定位。与BP神经网络不同,广义回归神经网络(GRNN)[4?6]算法不需要人工确定网络参数,在很大程度上避免了主观设置对结果的影响。遗传算法(GA) [7?10]的特点是不易陷入局部最优、易于同其他技术联合使用。但固定的交叉变异概率使寻优效率较低,不易用于实时三维定位,故引入自适应遗传算法(AGA)[11?12]。AGA通过个体适应度值而自适应调整交叉、变异概率,以提高算法的效率。通过使用AGA优化GRNN定位算法的参数,使三维室内定位算法的定位精度及效率得以提升。
1 AGA?GRNN三维定位模型构建
通过自适应遗传算法(AGA)改进模型参数,使基于广义回归神经网络的三维定位模型的定位精度和效率得以提高。GRNN善于处理不稳定的数据,适合解决非线性问题,并且当样本数据较小时可以更好地对其进行预测。其中,高斯函数的宽度系数[σ]是GRNN网络模型的参数又称为光滑因子,常采用交叉验证法得到一个最优值,但是耗时长、精度低。 因此本文使用AGA来优化网络的光滑因子。传统遗传算法[7]具有易于与其他技术混合、群体搜索性强、无需辅助信息、不易陷入局部最优解等特点。然而,固定交叉和变异概率影响了遗传算法的优化效率。因此,引入AGA算法依据个体的适应性对交叉和变异概率进行自适应调整,使计算效率得以提高。
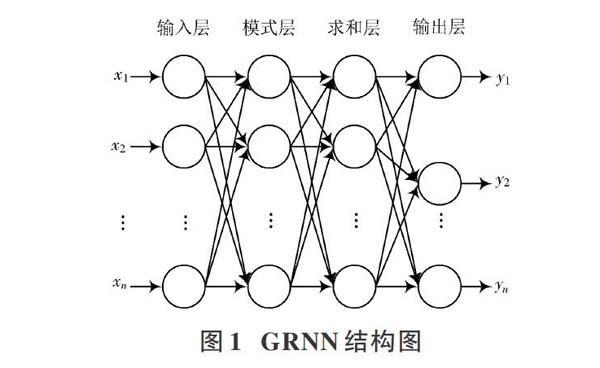
1.1 GRNN模型
GRNN模型如图1所示,由输入层、模式层、求和层和输出层四个部分构成。
GRNN网络模型的输入向量表示为[RSSI=[RSSI1,RSSI2,…,RSSIm]],输出向量表示为[Y=y1,y2,…,yn] 。
模型根据样本集预测概率密度函数[f(RSSI,Y)]:
[f(RSSI,Y)=1(2π)(m+1)/2σ(m+1)·1ni=1nexp-(RSSI-RSSIi)T(RSSI-RSSIi)2σ2·exp-(Y-Yi)22σ2] (1)
式中:指定模型参数[σ]的样本概率密度函数用[f(RSSI,Y)]表示;模型输入层的维数用[m]表示; [n]为样本个数;样本概率宽度用[σ]表示,即模型参数;第[i]个输入向量用[RSSIi]表示;第[i]个输出向量用[Yi]表示。
GRNN定位模型具有高度通用性的原因在于概率密度函数是从样本集中导出的。同时,GRNN定位模型不仅有良好的容错性,而且在定位过程中能减少因RSSI值的波动对定位精度的影响,进而提高了网络模型的定位能力。
在概率密度函数已知的情况下,实际测量的RSSI可根据式(2)预测出目标物体的真实位置。
[Y=E(YRSSI) =i=1nYi·exp-(RSSI-RSSIi)T(RSSI-RSSIi)2σ21ni=1nexp-(RSSI-RSSIi)T(RSSI-RSSIi)2σ2] (2)
式中:实际测量的信号强度向量用RSSI表示;预测位置向量用Y表示。
GRNN网络模型可以根据输入和输出自动调整,权重参数可以直接由样本数据确定,避免了迭代训练。 然而,在室内定位中,信号强度会被环境因素所影响,同一位置接收的 RSSI值会发生明显的波动从而导致实时收集的样本在训练样本中出现频率较低。当参数[σ]过小时,会出现过拟合现象,导致定位结果出现明显变化; 当参数[σ]过大时,会使预测精度降低。因此,选择适当的参数[σ]至关重要。
1.2 AGA?GRNN三维定位模型
通过AGA改进GRNN网络的光滑因子,从而构建AGA?GRNN三维定位模型。
1) 初始化遗传算法,在光滑因子的取值范围中,可随机产生规模为 NIND的初始种群,通过实数编码,得出最大遗传代数及遗传算法选择概率等参数,进化代数。
2) 通过建立与遗传算法相适应的函数,使用近似函数计算GRNN算法的输出结果与真实值坐标之间的误差的平方和并取其倒数,该值可以评估种群中个体的适应度函数,通常该值越小,说明个体越差,反之该值越大,表明个体越优良。适应度函数为:
[fit=1i=1n(Yi-Yi)2] (3)
式中:[Y]和[Y]分别表示训练数据对应的真实值和输出值;n为输入数据的数目。
3) 选择。根据个体适应度选择初始种群,保留第一个个体的概率,公式如下:
[Pj=fitjm=1NINDfitm] (4)
4) 交叉、变异:保留的个体用于交叉和变异的算法。通过在交叉、变异概率的选择中引入自适应确定机制,使其随着个体适应值的改变而自适应的变化,其调整公式为:
[Pc=k1fmax-f′fmax-favg, f′≥favgk3, f′≤favg] (5)
[Pm=k2fmax-ffmax-favg, f≥favgk4, f≤favg] (6)
式中:[f]為变异的父个体适应值;[fmax]为种群个体的最大适应值;[f′]为要交叉的个体中较大的适应度值;[favg]为种群的平均适应值;固定参数k1=0.5,k2=0.02,k3=0.85,k4=0.05。最后得到新的种群,进化代数。
5) 确定进化代数g是否达到最优值,如果达到,则停止运算并回到具有最高适应度的个体; 否则再次对步骤2)进行运算。
6) 利用最优平滑因子值作为GRNN网络模型的参数,建立三维室内定位模型。
7) 计算预测结果,评估AGA?GRNN网络性能。
2 仿真实验
为了检验AGA?GRNN三维定位算法的定位效果,将该算法同BP定位算法和GRNN定位算法进行对比。通过计算机仿真在Matlab环境中收集三维室内定位的输入输出、运行时间、参数变化等数据,并对三种三维室内定位算法的定位效果进行测试。考虑到真实环境中地面位置人流量大、物品较多的问题,本文将阅读器放在房顶的四个角上,在Matlab的仿真实验中阅读器的位置坐标如图2阅读器布置图所示,分别为(0,0,5),
(0,15,5),(15,0,5),(15,15,5)。
将阅读器读取的信号强度值(RSSI)作为 AGA? GRNN定位模型的输入,把参考标签的三维坐标作为输出,并且训练 AGA? GRNN三维室内定位模型。用50组数据样本进行30次迭代对定位模型进行训练, 然后使用9组标签进行定位测试,以确定测试获得的定位坐标是否与真实坐标相匹配。 定位算法流程图见图3。
3 结果分析
3.1 定位精度比较
三维定位的仿真结果如图4所示。其中,目标物体的真实坐标用实心点表示;AGA?GRNN算法定位坐标用方块表示;GRNN定位算法坐标用加号表示;BP定位算法坐标用上三角表示。
如图5定位误差所示,将AGA?GRNN三维定位算法与BP定位算法、GRNN定位算法通过定位结果的距离误差进行比较。 BP定位模型的最大定位误差与最小定位误差分别为68 cm和45 cm。GRNN定位模型的最大定位误差与最小定位误差分别为56 cm和37 cm。而AGA定位模型的最大定位误差与最小定位误差分别为33 cm和17 cm,实际坐标和预测坐标误差在35 cm以内。可以看出,AGA?GRNN与BP定位方法、GRNN定位方法相比,定位精确度明显提高。
3.2 光滑因子优化效率分析
将 AGA与 GA优化效率进行了对比,运用 AGA算法优化光滑因子时,初始种群规模为30,进化代数为50,选择概率为0.9,按照种群适应度值自适应调整交叉和变异概率,光滑因子取值范围为(0,50)。同时,将AGA算法与 GA算法优化光滑因子效率进行对比, AGA算法的光滑因子优化运行时间为2.2 s,GA算法的光滑因子优化运行时间为2.7 s,优化时间提高了0.5 s,可见 AGA算法在优化光滑因子时效率显著提高。
4 结 语
本文提出一种自适应遗传算法来优化广义回归神经网络的三维室内定位模型。运用大量数据对AGA?GRNN定位模型进行训练,同时通过9组数据对定位模型进行测试。通过仿真实验取得了不错的定位效果,仿真结果证明,三维室内定位模型 AGA? GRNN在参数优化定位效率上高于 GA?GRNN,同时比 BP,GRNN具有更高的定位预测精度,节约成本的同时又降低了计算量, 具有较好的应用前景。
注:本文通讯作者为徐天天。
参考文献
[1] 赵凯,胡海峰.神经网络和RFID相融合的室内定位算法[J].激光杂志,2015,36(8):138?141.
[2] 吴超,张磊,张琨.基于BP神经网络的RFID室内定位算法研究[J].计算机仿真,2015,32(7):323?326.
[3] HAO Linzhe, WEN Xianbin, LI Dan. Amorphous location algorithm based on BP artificial neural network [C]// International Conference on Frontiers of Things. [S.l.]: IEEE, 2014: 13?23.
[4] LI Erchao, MA Yuquan. The application of improved adaptive genetic algorithm in the optimization of discrete variables [J]. Journal of discrete mathematical sciences and cryptography, 2018, 21(2): 417?421.
[5] BENDU H, DEEPAK B B V L, MURUGAN S. Multi?objective optimization of ethanol fuelled HCCI engine performance using hybrid GRNN?PSO [J]. Applied energy, 2017, 187: 601?611.
[6] 文萌,钱晨,黄丹.基于BFA?GRNN的飞行绩效预测[J].电光与控制,2018,25(4):78?82.
[7] 杨晓吟.基于蚁群优化遗传算法的智能自动组卷算法研究[J].现代电子技术,2018,41(21):121?123.
[8] KUMAR S, KUMAR N, LIU S F. An inventory model for deteriorating items under inflation and permissible delay in payments by genetic algorithm [J]. Cogent business & management, 2016, 3(1): 161?172.
[9] 孔国立,张璐璐.遗传算法的广义回归神经网络建模方法[J].计算机工程与设计,2017,38(2):488?493.
[10] SAMATTAPAPONG Nara, AFZULPURKAR Nitin. A production throughput forecasting system in an automated hard disk drive test operation using GRNN [J]. Journal of industrial engineering and management, 2016, 9(2): 330?358.
[11] BAO Beifang, YANG Yu, LIU Aijun, et al. Task allocation optimization in collaborative customized product development based on adaptive genetic algorithm [J]. Journal of intelligent systems, 2014, 23(1): 1?19.
[12] 余发山,高勇.基于AGA优化RBF神经网络的矿井通风机故障诊断[J].电子测量技术,2017,40(9):241?245.
[13] 林悦,夏厚培.交叉验证的GRNN神经网络雷达目标识别方法研究[J].现代防御技术,2018,46(4):113?119.
