基于极值比统计量的改进型VI-CFAR检测算法
2020-07-23童泰良卢术平丁烽
童泰良 卢术平 丁烽
(第七一五研究所,杭州,310023)
引言
水声探测领域,声呐在进行目标检测过程中,虚警概率是一个极为重要的参数指标,虚警的错误判决将会引导系统对干扰杂波点进行跟踪,严重时还会将相关信息发送至作战系统从而引导鱼雷对虚假目标进行打击,暴露自身位置,浪费资源。因此,在检测过程中需采用相应的恒虚警处理(Constant False Alarm Ratio,CFAR)算法以保证虚警概率恒定。在恒虚警检测发展的过程中,最先提出的是均值类CFAR处理方法,其中最为经典的是单元平均恒虚警率(Cell Average-Constant False Alarm Ratio,CA-CFAR)检测方法[1,2]。该方法将临近参考单元(一般选择距离分辨单元)中回波数据的统计平均值作为估计待检测单元(Cell Under Test, CUT)的参考值,在背景起伏相对平稳的噪声背景环境下检测性能最好。但考虑到海洋生物、海底起伏地形、海浪以及海洋自身的非均匀结构等复杂多样性环境,这些非理想环境容易导致背景噪声表现出非均匀性,从而对背景功率水平的估计出现偏差,常规CA-CFAR方法的检测性能会下降,虚警概率会增加[3]。
针对上述问题,国内外许多专家学者开展了深入的研究[4]。在 CA-CFAR方法的基础上有专家学者提出了单元平均选大恒虚警率(Greatest Of CFAR,GO-CFAR)与单元平均选小恒虚警率(Smallest Of CFAR, SO-CFAR)检测方法[5,6]。针对有干扰存在的环境,有学者提出了有序统计恒虚警率(Order Statistic CFAR, OS-CFAR)方法[7],该算法通过背景参考单元的数据进行大小排序来估计背景的功率水平,较好地解决了背景参考单元中存在干扰的问题。近年来,许多新算法被提出,如加权单元平均恒虚警率(Weighted Cell Average-CFAR,WCA-CFAR)、剔除平均恒虚警率(Trimmed Mean-CFAR,TM-CFAR)、OSGO-CFAR(Order Statistic Greatest Of CFAR)、OSSO-CFAR(Order Statistic Smallest Of CFAR)、移动有序统计(Moved Order Statistic CFAR,MOS-CFAR)、变化指数恒虚警(Variability Index CFAR,VI-CFAR)与线性组合有序统计(Linear Combination Order Statistic CFAR,LCOS-CFAR)恒虚警率处理方法等[8-14]。其中VI-CFAR算法由于其参数求取简单、操作方便、适应性较强而得到广泛应用。但是由于其用于判决背景均匀性的参数只有变化指数 VI一个值,当面临更复杂的环境时,判决的效果不太好。当前后窗都表现为非均匀时,VI-CFAR选择SO-CFAR检测器,若此时两侧的参考滑窗中都存在强干扰点,则目标检测的效果会很不理想。
本文提出基于极值比统计量的改进型恒虚警检测算法(Based on Extremum Ratio Characteristics CFAR,BERC-CFAR),在原VI-CFAR检测算法的基础上,增加新的统计量来辅助判决并引入了OS-CFAR检测器,改善了VI-CFAR算法在多干扰环境下目标检测能力。该算法在声呐探测中的典型平稳噪声环境、多离散强干扰环境中与原算法相比都有更优的恒虚警检测性能。
1 CFAR检测算法
在CFAR检测器中,主要设计的是如何通过对背景参考单元的操作来获取对背景功率的准确估计。以均值类恒虚警检测算法为例,在对背景噪声瞬时功率水平进行估计时,通常采取对左右两边背景参考单元取均值的方法。估计出噪声背景的瞬时功率Z之后,将其与一个求得的门限因子T相乘,以此来得到自适应变化的门限S。最后通过待检测单元统计量D与门限S的比较就可以判决此时的待检测单元中是否存在目标。
如图1所示,设CUT前后窗分别包含n个参考单元,CA-CFAR检测算法是通过对前后参考单元统计量求平均值来得到背景噪声的功率估计:

假设噪声服从高斯分布,每一个参考单元的值是相互独立同分布的。则虚警概率为
式中,fZ(z)为Z的概率密度函数,μ为背景噪声的功率,MZ(u)是随机变量Z的矩母函数。则由此可以推导出[15]:

由此可以得到虚警概率只和背景单元数与预先设定的门限因子T有关,故可以保持恒虚警率。
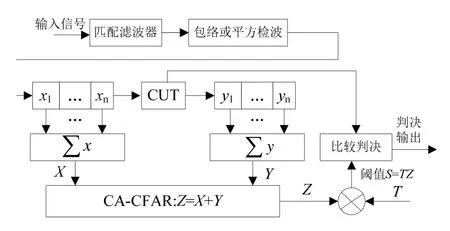
图1 CA-CFAR检测器的结构图
对检测单元 CUT进行检测,整个过程可分为以下4个步骤:
1) 在待检测单元的两侧各选取n个参考单元;
4)比较CUT单元数据和门限大小,判断目标有无。若超过门限,则判决为有目标,反之则判决目标不存在。
2 改进算法
2.1 VI-CFAR算法
在工程实际中,我们所面对的噪声背景并不是始终平稳的,而是伴随着波动与干扰。对此有学者在整合了各类恒虚警检测算法的基础之上提出了变化指数恒虚警检测器,即VI-CFAR算法。这种算法可以对当前所处的背景环境做出比较准确的判断,并以此为依据选择适合的检测算法,从而能够对背景噪声功率水平进行很好地估计,提高检测器的性能。检测器结构框图见图2。

图2 VI-CFAR检测器的结构框图
在检测过程中,可根据求得的参数来选择具体的检测算法,算法的选择策略可参考表1[15]。
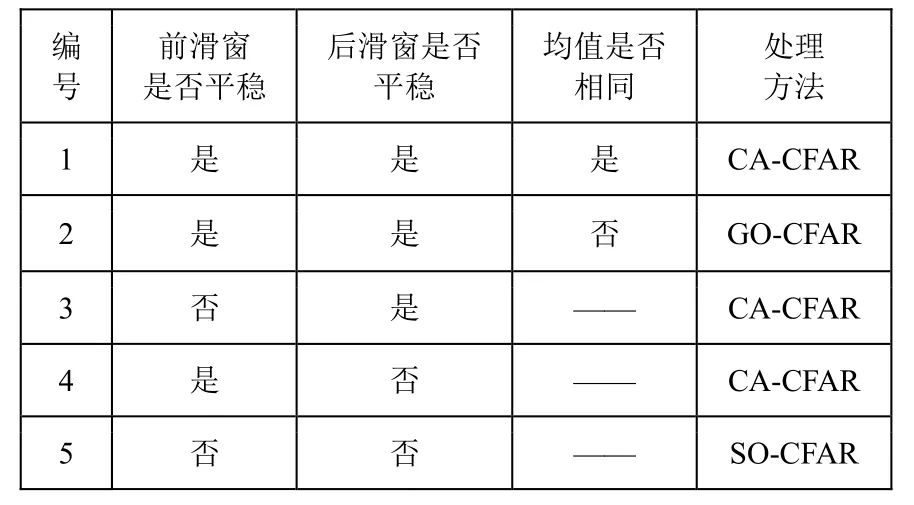
表1 常规VI-CFAR算法选择依据
2.2 BERC-CFAR检测算法
从表1可以看出,当待检测单元左右两侧背景参考滑窗中都存在干扰时,通过参数判决容易使其选择 SO-CFAR算法,在此类情况下容易造成检测门限的提高而使检测性能下降。针对在干扰环境中均值类恒虚警检测算法的性能下降问题,有学者提出直接用OS-CFAR算法替代原来的SO-CFAR算法。这类算法的一个明显缺点是在参考滑窗中没有干扰目标存在时,检测器仍有较大可能性被选择为OS-CFAR算法。但无干扰时,用OS-CFAR算法性能则逊色于 SO-CFAR算法。因此我们应用研究如何正确地对参考滑窗中有无干扰目标进行判断,从而根据判决情况合适地将 OS-CFAR选项引入。本文提出的 BERC-CFAR检测算法原理是在原有的VI-CFAR算法判决体系基础之上,对左右两侧参考滑窗进行计算,得到一个新的统计量ER,若ER超过预先设定好的门限TER,则说明参考滑窗中有干扰目标存在。若判决结果为两边均存在干扰,则选用 OS-CFAR算法进行处理,如果不是则可以选取均值类CFAR算法,通过对可变指数VVI与均值比VMR这两个统计量的计算,选取适合的恒虚警算法。改进后算法的流程见图3。

图3 改进型VI-CFAR算法处理流程框图
检测过程中,需要求取极值比ER、可变指数VVI与均值比VMR三个统计量。下面给出这三个统计量的定义。

式中,是参考单元计算得到的算术平均值。将得到的ER值与设定的门限值相比:

求取可变指数VVI:

式中,代表估算的方差,代表估算均值,是参考单元计算得到的算术平均值。将VVI与设定好的门限值KVI相比:

分别对每一个滑窗进行VVI求解,可以判断两边的参考窗是平稳还是非平稳。
前滑窗A与后滑窗的均值比VMR定义为:

式中,表示前半部分滑窗的均值,表示后半部分滑窗的均值。将计算得到的VMR与门限值KMR相比较:

通过均值比可以确定前后参考窗的均值是否相同。
3 算法仿真分析
3.1 门限选取
ER门限值的选取应当满足以下两个条件:1、当干扰目标不存在,即背景相对平稳时,门限应远高于对应统计值;2、当存在干扰目标时,对应的统计量的期望值应当高于设定的门限值。
在对背景噪声的门限进行求解时,首先应确定其服从的概率密度分布模型。当前主要有高斯分布模型、韦布尔分布模型、对数正态分布模型以及K分布模型,其中高斯分布模型应用最为广泛,故本文将噪声模型选定为高斯分布模型。利用蒙特卡洛试验求取对应统计量的概率密度分布,仿真条件如下:参考滑窗的单元数设为50,随机产生50个服从高斯分布的随机数,得到对应的统计值后利用式(8)求其极值比,蒙特卡洛试验次数设为100 000,得到对应统计量ER的概率密度分布图,分别在其中加入干噪比(Interference Noise Ratio, INR)为10、20、30的干扰目标,重复上述过程得到对应的概率密度分布图见图4。结合上文的两条门限选取原则,最终将门限值定为6。


图4 ER概率密度分布图
3.2 仿真结果对比
为了验证改进后算法的性能,本文针对VI-CFAR算法与改进后的算法在有干扰目标的环境下进行了仿真。首先为比较BERC-CFAR算法中新引入的OS-CFAR算法与原有的SO-CFAR算法在有强目标干扰时的检测性能优劣,本文进行了如下仿真:首先将左右参考窗数量均设为25,均匀背景服从瑞利分布,分布参数为 3,在两侧均加入 INR为 20 dB的强干扰目标,目标和强离散源都服从Swerling1模型。分别选择 OS-CFAR算法与SO-CFAR算法进行检测,虚警概率设置为10-3,蒙特卡罗试验次数为100 000次,得到这两种检测算法的检测性能曲线对比见图5。

图5 两种检测算法的检测性能曲线对比图
根据仿真结果我们可以发现,当背景参考单元的两侧均存在强干扰目标时,OS-CFAR算法的检测性能明显优于SO-CFAR算法,当检测概率为50%时,OS-CFAR算法的性能较SO-CFAR高出近5 dB。可见,在这种检测背景下,若对应的自适应检测算法能够主动选择到 OS-CFAR算法,那么必然带来检测性能上的优势。
根据前面得到的仿真结果,下面我们对两侧均存在强干扰时VI-CFAR算法与BERC-CFAR算法各自选择到SO-CFAR与OS-CFAR的概率进行仿真。仿真参数如下:左右参考窗数量均设为25,均匀背景服从瑞利分布,分布参数为 3,在两侧均加入强干扰目标,干噪比为0~30 dB,虚警概率设置为10-3,蒙特卡罗试验次数为500 000次,得到的仿真结果曲线见图 6。从图中可以看出,当两边均存在干扰时,BERC-CFAR算法选择到OS-CFAR算法的概率要比传统的VI-CFAR算法选择到SO-CFAR的概率要高。BERC-CFAR能够提高检测器的检测性能,根本原因在于它提高了对于环境判断的准确率,对于是否存在强目标干扰的识别率高于 VI-CFAR算法,再加之OS-CFAR算法的性能优于SO-CFAR算法,可以推出BERC-CFAR算法在强目标干扰环境下的性能是优于VI-CFAR算法的。
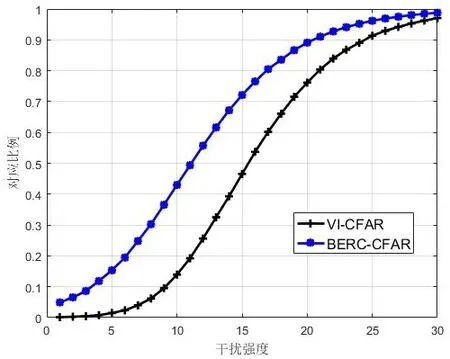
图6 两种检测算法的选择准确率对比图
下面通过仿真实验比较常规 VI-CFAR算法与BERC-CFAR算法的检测性能。分别在平稳环境与目标干扰环境下对上述两类算法进行蒙特卡洛试验仿真,得到对应的检测性能曲线。其中参考单元数与之前一致,平稳背景下噪声包络服从瑞利分布,分布参数为 3,虚警概率设置为 10-3,蒙特卡罗试验次数为100 000,各检测算法的门限因子与门限值见表2。图7为在两侧参考单元格均加入强干扰目标后 VI-CFAR算法与 BERC-CFAR算法的检测ROC曲线,干噪比为10 dB。由仿真结果可以看出在强目标干扰背景下,BERC-CFAR算法的检测性能明显优于常规 VI-CFAR算法。当SNR=10时,BERC-CFAR算法的检测概率比VI-CFAR算法高出约39%;检测概率都为50%时,BERC-CFAR算法的性能高出近7 dB。

表2 门限因子及参数设定
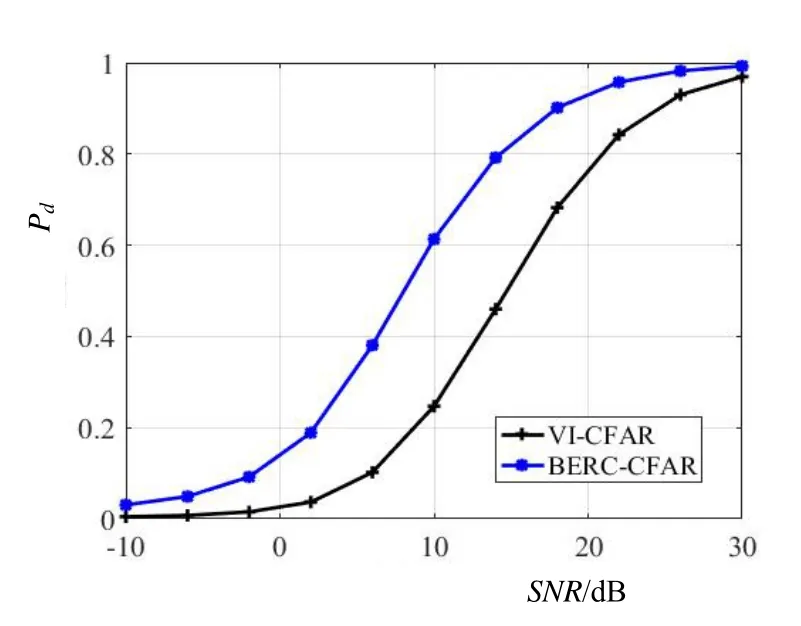
图7 两侧参考窗均有干扰时两种检测算法的检测性能对比图
在平稳噪声与单干扰背景下对 VI-CFAR算法与BERC-CFAR算法进行仿真,得到的仿真结果见图 8~9。

图8 背景平稳时两种检测算法的检测性能对比图

图9 单干扰背景下两种检测算法的检测性能对比图
由图8~9可知,BERC-CFAR算法的检测性能与VI-CFAR检测算法相比几乎一致,检测性能不会下降,原因是该算法在引入新统计量的同时,又保留了VI-CFAR算法原有的分类标准,因此对于非强目标干扰环境,BERC-CFAR算法仍能保持检测性能不下降。
4 总结
本文提出了强干扰背景下的声呐目标恒虚警检测算法,即BERC-CFAR检测器,通过性能分析以及仿真实验得到的结果表明,在强干扰目标背景下,BERC-CFAR检测算法表现出了良好的检测性能,可适应更复杂的背景环境,具有更好的应用价值。但改进后的检测算法仍然存在一些问题,比如,背景均匀判决、更匹配的检测器选择等,后续可借助辅助知识(比如海底地形、干扰杂波先验分布等)[16,17]和AD检验、KS检验[18,19]等,进一步改善均匀性参考单元判决和选择。
