LiDAR 技术在高速公路改扩建中的应用及精度分析
2020-07-22廉福绵
廉福绵
(中交公路规划设计院有限公司,北京 100088)
1 引言
随着经济社会的快速发展,不少早期建成的高速公路已经达到甚至超过了其通行能力,出现了交通拥堵、服务能力下降的现象[1]。因此,对既有高速公路的扩容改造,以适应社会经济的发展需要,已成为近几年研究的热点问题[2]。高速公路改扩建最重要的是要精准掌握既有道路的路面数据,从而确定最佳的改扩建方案[3]。传统的改扩建勘测方法是采用GPSRTK 技术和水准测量、全站仪测的方法进行路面数据获取,需要大量的人工上路测量,存在安全隐患、干扰路面交通以及效率低下等问题[4]。
机载LiDAR 设备包括激光发射与接收装置、数码相机、GPS/IMU 系统等,能够快速获取地面点云和影像数据[5],已经广泛应用于交通、规划、智慧城市建设、国土等领域[6-8],而尚无将其应用于高速公路改扩建勘测领域的成功案例。本文结合京藏高速公路改扩建项目的特点和精度要求,提出了采用直升机载LiDAR 进行高速公路改扩建勘测,从数据采集、靶标控制测量、点云数据精化处理、成果精度分析等方面进行研究,最终得到了平面位置精度优于5cm,高程精度优于2cm 的路面数据成果,满足改扩建的设计的要求。
2 工程概况
京藏高速公路改扩建项目N3 标段路线全长54.041 km,起点接第N2 标段终点桩号为K1160+600,设置枢纽互通立交,终点与第N4 标段起点顺接桩号为K1213+000,其中新建道路长度39.538 km,改建道路长度14.503 km。改扩建段交通繁忙,项目工期紧,且精度要求较高。采用传统的勘测手段存在巨大的安全隐患、影响路面交通,所以提出了采用LiDAR 技术进行改扩建段勘测的技术方法。
3 工程方案设计与实施
3.1 方案设计
为保证数据获取的精度,采用Bell206 直升机搭载OptechOrionH300 型激光雷达进行路面高精度点云数据获取,航飞相对高度为200m,获取点云密度为160 点/m2,并采用航飞之前布设的地面靶标控制点进行点云数据的精化处理,最后得到高精度的路面点云数据。项目设计方案如图1 所示。
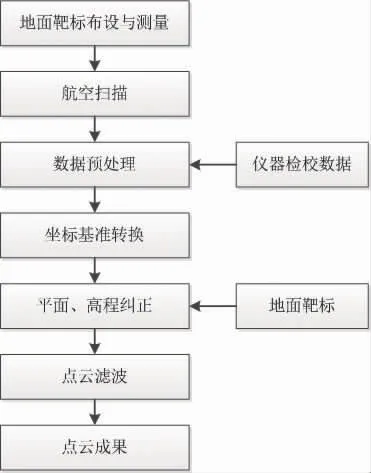
图1 项目设计方案
3.2 靶标控制点布设与测量
为了对点云数据进行精化处理,在航空扫描前需要在高速路两侧的应急车道上布设一定数量的靶标控制点。为了验证方案的可行性和控制点间距对数据精度的影响,本项目按照每200 m 布设一对控制点,控制点的形状采用对三角形设置,大小为1.5 m,如图2 所示。控制点的平面位置采用带有简易三脚架的GPSRTK 进行测量,高程采用四等水准的方法测量。
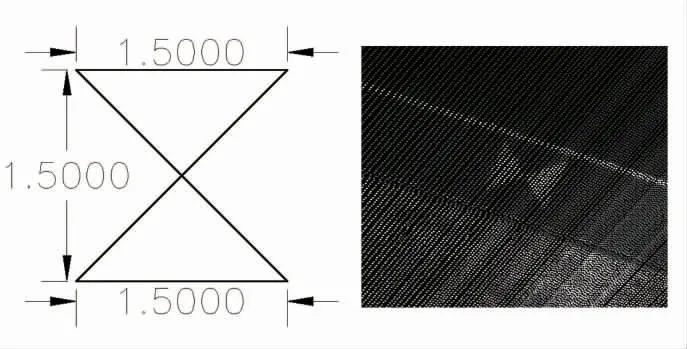
图2 靶标控制点及其在点云中的显示
3.3 数据获取
直升机航空扫描航线沿道路中线敷设,为减小IMU 累计误差的影响,每条航线的分型时间应当小于15min。且每段至少包含3 个靶标控制点,相邻两端的公用靶标控制点至少为1 个,以便于点云数据的精化处理。每段航线的开始和结束均进行"∞"飞行进行IMU 初始化,另外,还应当保证地面GPS 基站覆盖范围不超过15km。获取的路面点云数据如图3 所示。

图3 获取的路面点云数据
3.4 数据处理
获取的路面点云数据需要经过数据预处理、坐标基准转换、数据精化处理、点云分类滤波等才能得到满足要求的成果。
(1)数据预处理
数据预处理是采用LMS 和POSPAC 等软件进行激光点云和POS 数据解算,得到条带的*.las 数据和航迹线数据,以进行下一步的工作。
(2)数据基准转换
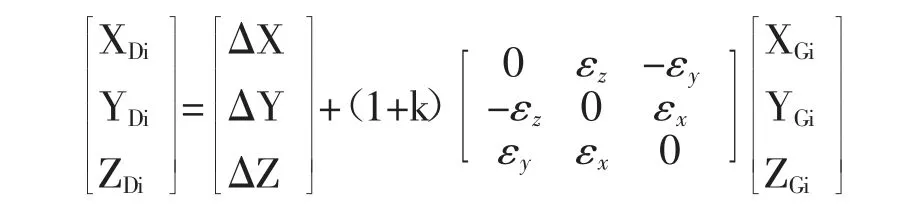
经预处理后的点云数据为WGS-84 坐标系,投影为UTM 投影,需要采用七参数模型将其转换到工程独立坐标系下,才能够提供设计施工使用。转换的数学模型如下[9]:

其中:
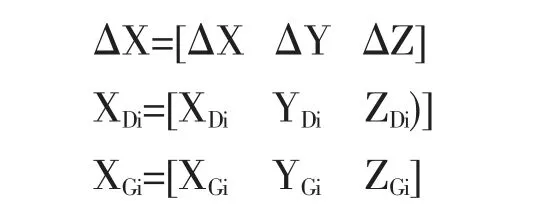
式中R 均为旋转矩阵,k 为尺度变化参数,旋转参数矩阵为:
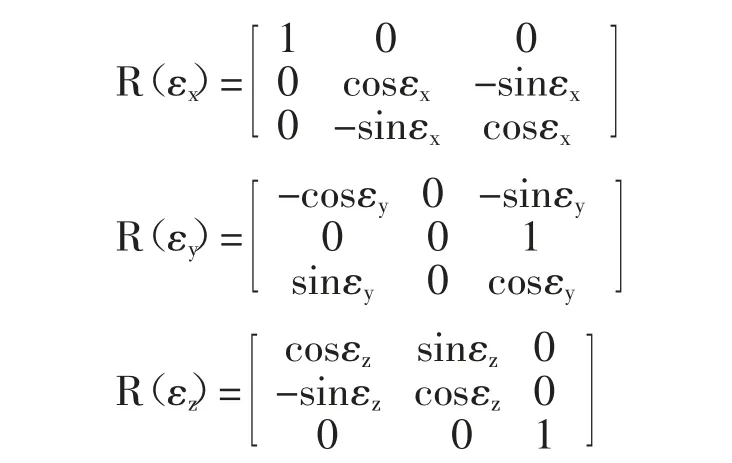
由于旋转角度极小,可认为cosε=1,sinε=ε,则(1)式可转化为:
(3)点云数据精化处理
a.平面坐标精化处理
由于IMU 的辅助作用,POS 系统在短时间内的定位定姿精度较高,所以在一定距离内,点云数据的相对精度比较高。因此点云数据平面位置精化处理采用分段仿射算法进行,其数学原理为:

式中:(X,Y)T为校正后点云平面坐标;(x0、y0)T为校正前点云平面坐标;a、b、c、d、dx、dy 为仿射变换参数[10]。
b.高程精化处理
为保证点云高程中误差优于2cm,在完成其平面位置精化处理后,需要进行高程的精化处理。高程精化处理利用三角网算法进行,其原理是先计算每个靶标控制点位置点云与靶标点的高差dz,并自动生成覆盖点云数据的最小外接矩形,然后以靶标点与外接矩形的顶点进行构网,建立改正模型,其原理如图4 所示。
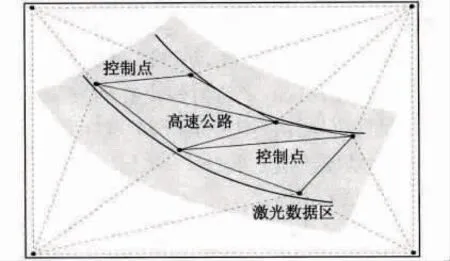
图4 高程改正模型原理
假设三角网模型中的三个顶点坐标为(x1,y1,z1)、(x2,y2,z2)及(x3,y3,z3),由于靶标控制点间距较短,可认为在每个三角形范围内高程异常呈线性变化,则可得:
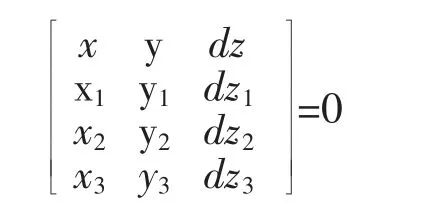
由上式可得点云数据高程改正值:

式中,x,y 为点云平面坐标,dz 为点云高程改正值,xi,yi(i=1,2,3);dzi(i=1,2,3)为三角形顶点点云高程与控制点高程差值。
4 成果分析
为检查精化处理后点云数据精度,并研究靶标控制点间距对点云精化处理结果的影响,分别采用不同间距的靶标点对点云数据进行精化处理,其余的靶标点作为检查点,当采用靶标点间距为400m时,精化处理后的点云成果平面位置中误差为3.5cm,高程中误差为1.2cm,完全能够满足高扩建的精度要求。精化处理后的中误差分布如图5、图6 所示。
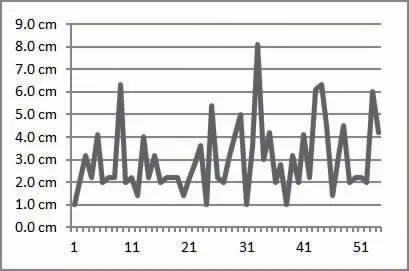
图5 点云平面误差
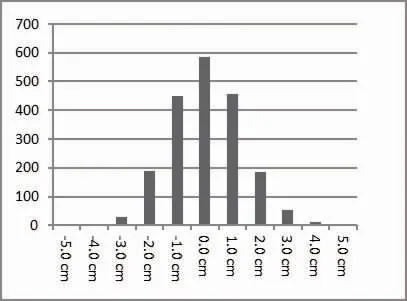
图6 点云高程误差分布
分别采用不同间距的靶标点对点云数据进行精化处理后的精度统计如表1 所示。
由表1 可知,点云精化处理的精度随着靶标控制点的距离增大而降低,当靶标控制点的间距小于3km 时,精化后的平面和高程精度均能够满足高速公路改扩建勘测的要求,在综合考虑成果精度和效率及成本的同时,地面靶标控制点的布设距离应当为1km~3km。
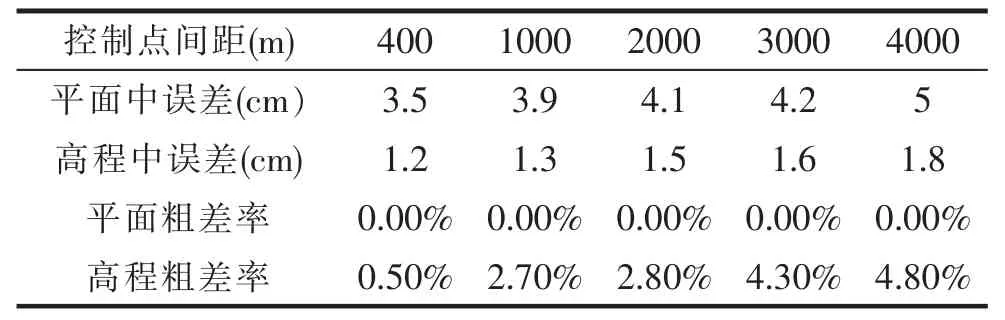
表1 不同间距靶标点精化点云精度统计
5 结束语
本文以京藏高速公路改扩建项目为例,分别从数据获取方式、地面靶标控制点布设、点云数据精化处理等方面对LiDAR 技术应用于高速公路改扩建勘测进行了研究,并对成果进行了分析和评价,结果如下:
(1)直升机飞行机动灵活,采用其搭载LiDAR设备进行航空扫描,能够高效的获取满足高速公路改扩建勘测的精度要求的路面数据,既保证了外业工作人员的安全,又能够不影响路面交通。
(2)在进行数据获取时,点云密度应当保证靶标控制点易于识别;采用地面靶标控制点对点云数据进行精化处理,精化后成果的精度与靶标控制点的间距成反比,为保证方案的经济合理性,靶标控制点布设间距宜为1km~3km,精化后的成果平面位置精度优于5cm,高程精度优于2cm。
