带主动横向稳定杆的混合电磁悬架性能研究
2020-07-22季云华汪若尘丁仁凯
季云华,汪若尘,丁仁凯,杨 霖
(江苏大学汽车与交通工程学院,江苏 镇江 212013)
1 引言
据统计表明,车辆侧翻事故占总事故量的20%以上[1]。为了提高车辆的抗侧倾能力,通常会在车辆底盘上安装横向稳定杆。被动横向稳定杆虽然能够提高车辆抗侧倾刚度,但无法针对不同情况进行实时调整。针对这一问题,文献[2]设计了由旋转作动器连接的横向稳定杆,并根据侧向加速度信号对对横向稳定杆进行主动控制。文献[3]采用模糊PID 控制主动横向稳定杆。文献[4]通过研究表明主动横向稳定杆能够很大程度地提高车辆的操稳性及舒适性。为了进一步提高车辆的操稳性与舒适性,文献[5]将主动横向稳定杆与主动悬架进行集成,其研究表明:通过对两子系统进行控制,不仅能够利用主动横向稳定杆提高车辆抗侧倾能力而且能够通过主动悬架很大程度地提高乘坐舒适性。主动悬架虽然能够很大程度上提高车辆动力学性能,但依旧无法解决能耗过高的问题[6-7],而主动横向稳定杆也是一耗能元件,因此将两者进行集成势必导致整车能耗进一步增加。
半主动混合电磁悬架将直线电机与减振器集成,通过调节直线电机外接电路电阻从而改变直线电机阻尼以实现对悬架半主动控制[8-9],且直线电机作为发电机时可回收悬架振动能量对外接电路进行充电[10]。考虑到关于主动横向稳定杆对半主动混合电磁悬架动力学性能及馈能性能的影响研究较少,利用某轿车底盘参数在Adams 中建立了整车底盘模型,并在此基础上加入主动横向稳定杆及混合电磁悬架,进一步在Simulink 中建立了主动横向稳定杆及混合电磁悬架的控制系统,进行了联合仿真,分析在匀速直线行驶工况及开环转向工况下车辆的性能。
2 Adams-Simulink 联合仿真模型建立
2.1 整车底盘模型建立
为了提高仿真精度,以实验所用车辆为研究对象,并对其底盘各硬点进行测量,基于Adams/Car 软件建立了整车多体动力学模型。该车辆的前悬子系统为麦弗逊式,后悬子系统为四连杆式,前后主动横向稳定杆分别通过球铰链与前后悬架摆臂相连。
研究的主动横向稳定杆为液压旋转马达式,其通过可正反转的电动液压泵驱动液压旋转马达,液压马达连接左右两侧稳定杆。当车辆行驶时,控制器输出信号至电磁调控阀体,电磁调控阀体决定电动液压泵输出油压的大小,从而控制液压马达输出转矩以控制左右两侧稳定杆产生抗侧倾力矩,最终达到控制车身侧倾的效果。在Adams 中建立的前主动横向稳定杆模型,如图4 所示。图中:下标F—处于前主动横向稳定杆中;Mm-F—前液压马达输出力矩;aF、bF、cF—球铰链安装位置距离稳定杆中心的纵向距离、横向距离、垂向距离;Fx-LF、Fz-LF—左侧球铰链传递给左悬摆臂的纵向力、垂向力;Fx-RF、Fz-RF—右侧球铰链传递给右悬摆臂的纵向力、垂向力;φ—车身侧倾角。

图1 前主动横向稳定杆模型Fig.1 Model of Front Active Roll Stabilizer
前后主动横向稳定杆结构参数,如表1 所示。
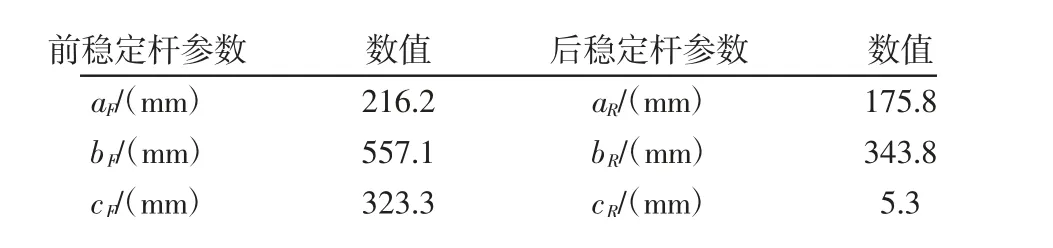
表1 主动稳定杆结构参数Tab.1 Structural Parameters of Active Roll Stabilizer
整车底盘的部分参数,如表2 所示。
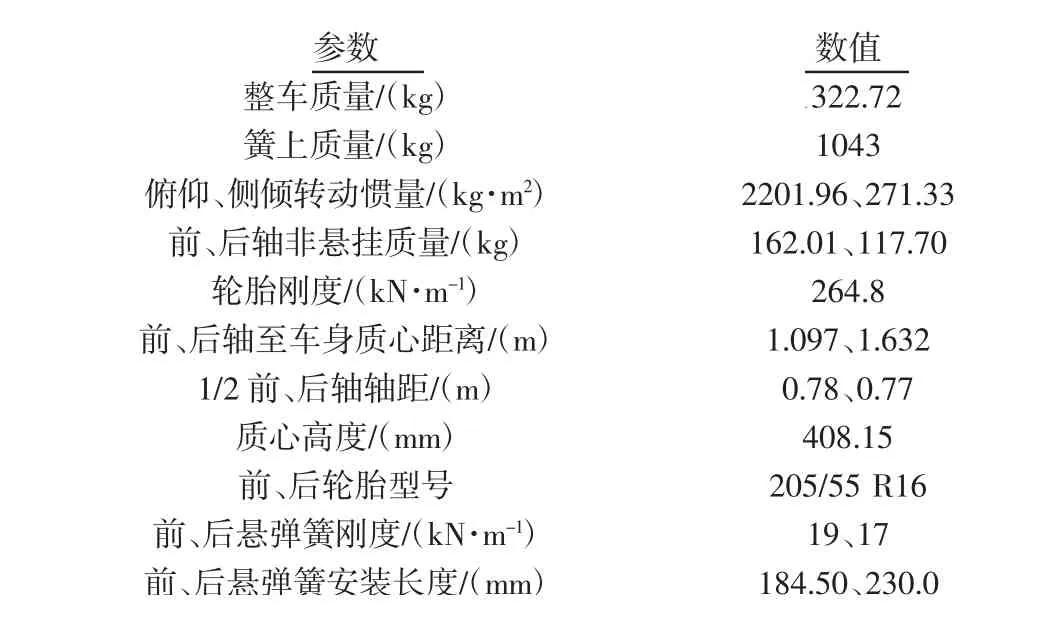
表2 整车系统参数Tab.2 Parameters of Vehicle System
并在Adams/Car 中建立的整车底盘模型,如图2 所示。
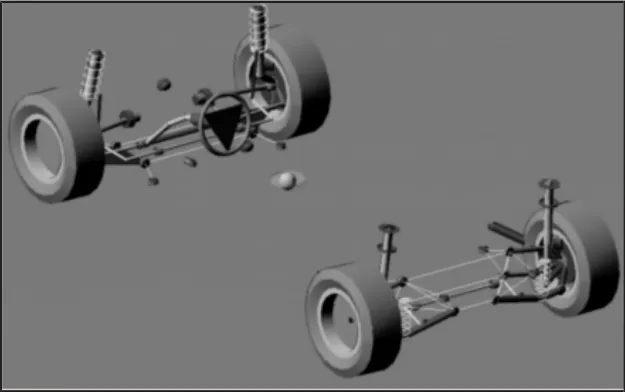
图2 Adams 底盘模型Fig.2 Chassis Model of Adams
2.2 联合仿真模型建立
为了实现对悬架系统的半主动控制,Adams 模型中的各减振器力以及前后横向稳定杆的转矩设置为由外部输入,并将车身的侧倾角以及各悬架相对速度与各悬架顶端的绝对速度作为输出信号。利用Adams/Car 将所建立的整车底盘模型生成为Simulink 的控制对象,并在Simulink 中构建半主动混合电磁悬架及主动横向稳定杆的控制策略。通过该控制策略,Simulink 输出各悬架直线电机半主动控制力以及前后横向稳定杆液压马达转矩至Adams 整车模型中,以实现对各直线电机及横向稳定杆进行主动控制。Adams-Simulink 联合仿真的信号传递路线,如图3所示。
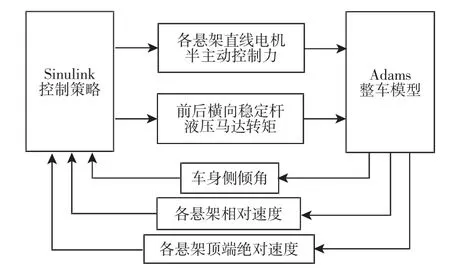
图3 联合仿真信号传递示意图Fig.3 Signal Transmission Route of Co-Simulation
3 控制策略设计
混合电磁悬架可实现对车身垂向振动的控制,利用改进天棚控制算法可实现半主动控制,并实现能量回馈。主动横向稳定杆主要控制的是车身的侧倾,通过所设计的模糊比例控制,输出液压马达的目标转矩。Adams-Simulink 联合仿真的控制框图,如图4 所示。

图4 联合仿真控制框图Fig.4 Control Block Diagram of Co-Simulation
3.1 混合电磁悬架改进天棚控制算法设计
1/4 悬架模型,如图5 所示。
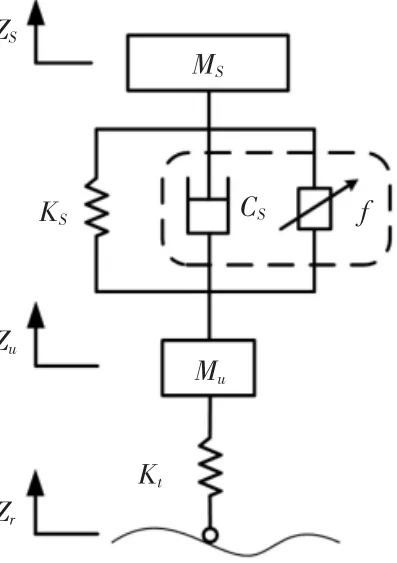
图5 1/4 悬架模型Fig.5 Model of Quarter Suspension Model
图中:Ms、Mu、Zs、Zu、Zr、Ks、Kt、Cs、Csky、f—簧上质量、簧下质量、簧上位移、轮胎位移、路面激励、弹簧刚度、轮胎刚度、减振器阻尼、天棚阻尼以及直线电机力。传统天棚控制的原理是在簧上质量上加入一阻尼产生抑制其运动的阻尼力:

而改进天棚控制下的作动器其输出的阻尼力为:

在集成直线电机与液压减振器的混合电磁悬架中,直线电机与减振器分别输出式(2)中前后两部分力。进一步为了实现半主动控制设定直线电机最小等效阻尼Cmin以及最大等效阻尼Cmax。因此各悬架需实时计算直线电机的预期等效阻尼:

通过将直线电机的预期等效阻尼Ceq与直线电机的最小等效阻尼Cmin及最大等效阻尼Cmax进行对比,以确定直线电机阻尼力fij,具体规则如下:
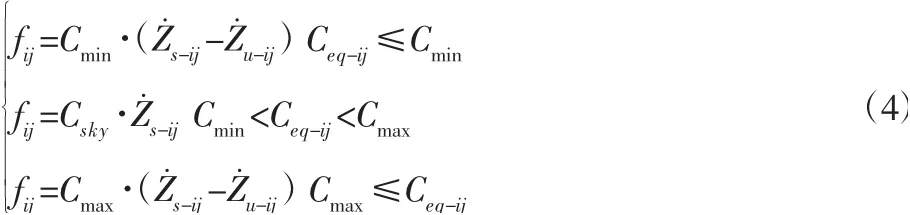
此时,各直线电机的阻尼力fij与减振器阻尼力fs=-cs·(Z˙s-Z˙u)方向相同,各直线电机在悬架系统中与减振器一样始终消耗悬架振动能量,而直线电机将这部分能量用于对外部电路进行充电,理论馈能瞬时功率可达:

3.2 主动横向稳定杆模糊比例控制算法设计
车辆发生侧倾时后悬示意图,如图6 所示。图中:后缀LR,RR—左后、右后;φ、ay、hg、hr、B—侧倾角、侧向加速度、质心高度、侧倾中心高度、轴距。由车身侧倾而产生的侧倾力矩为:

此时质心发生横向位移而产生的横向位移力矩为:

同时车身侧倾导致左右侧载荷发生转移,由此产生的前、后载荷转移力矩分别为:

对车辆纵向中心线取矩得到力矩平衡:

式中:MaR、MaR—代表前、后横向稳定杆产生的抗侧倾力矩。
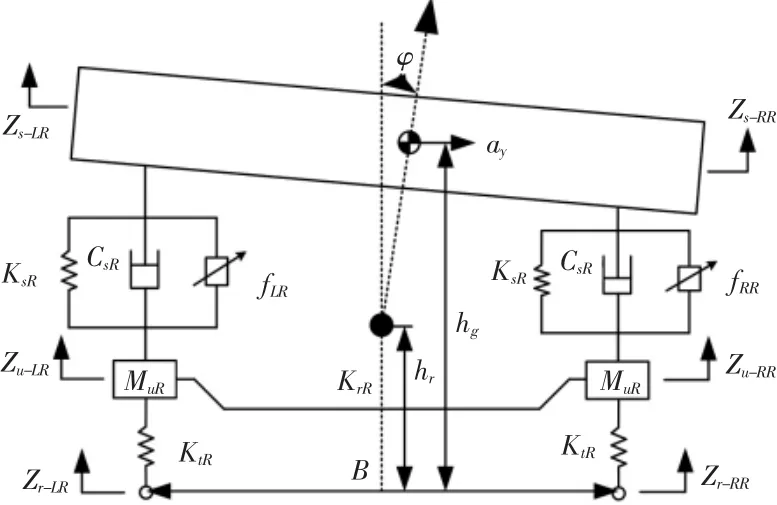
图6 车身侧倾示意图Fig.6 Body Roll Diagram
当车身侧倾加剧,侧倾力矩、横向位移力矩以及载荷转移力矩会随之增大,由于同轴左右轮胎载荷转移量越大越容易引起车辆侧翻,会导致行驶时的操稳性受损,为了减轻车身侧倾,需要增大前后主动横向稳定杆抗侧倾力矩。由结合式(6)~式(10)可知,侧向加速度、车身侧倾角以及轮胎载荷可作为主动横向稳定杆调节抗侧倾力矩的影响指标。由于轮胎载荷在实际情况中较难测得而侧向加速度变化频率过于频繁,因此选用车身侧倾角作为控制系统的反馈参数。
若忽略杆件变形,前后主动横向稳定杆通过球铰链传递给悬架的垂向力分别为:

进一步得到前、后主动横向稳定杆产生的抗侧倾力矩分别为:

由式(11)、式(12)可知,主动横向稳定杆的抗侧倾力矩与液压马达的转矩成正比。为了减少车身受力不均匀,需保证前、后主动横向稳定杆对车身产生的抗侧倾力矩大小相同,从而得到前、后横向稳定杆液压马达转矩比值需保持在左右。
由于半主动混合电磁悬架主要抑制车身的垂向振动,主动横向稳定杆主要抑制的是车身的侧倾运动,为了在匀速直线运动时最大限度的发挥半主动混合电磁悬架的优点,需将主动横向稳定杆刚度调低;而在转向或车身侧倾严重时最大限度发挥主动横向稳定杆的作用,需将主动横向稳定杆刚度调高。因此进一步设计了模糊比例控制算法。其控制框图,如图7 所示。模糊控制器的输入为车身侧倾角偏差的绝对值e以及车身侧倾角偏差绝对值的变化速率ec,比例控制器比例系数kp作为模糊控制器的输出。设e、ec、kp的实际变化范围分别为[0,emax]、[-ecmax,ecmax]、[0,kpmax];其论域分别为[0,6]、[-6,6]、[0,6],则比例因子k1=6/emax、k2=6/ecmax、k3=6/kpmax;模糊控制规则,如图8 所示。进一步将模糊控制器输出的比例系数kp与车身侧倾角偏差的绝对值e相乘进行比例控制,其结果为主动横向稳定杆的等效刚度ars。最后将等效刚度ars 与车身侧倾角相乘,得到主动横向稳定杆液压马达理想转矩。
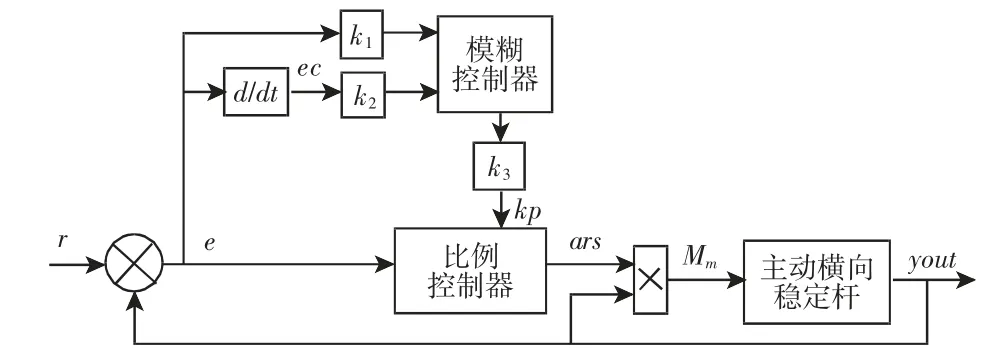
图7 主动横向稳定杆控制框图Fig.7 Control Block Diagram of Active Roll Stabilizer

图8 模糊控制规则Fig.8 Fuzzy Control Curve
4 整车控制效果仿真
4.1 匀速行驶性能仿真
为了研究在车辆匀速直线行驶时,主动横向稳定杆对半主动混合电磁悬架的性能的影响,分别对无横向稳定杆的半主动混合电磁悬架、带被动横向稳定杆的半主动混合电磁悬架以及带主动横向稳定杆的半主动混合电磁悬架进行联合仿真分析,此时车辆以72km/h 的车速在C级路面上匀速行驶,仿真结果,如表3 所示。

表3 C 级路面仿真结果Tab.3 The Simulation Results of C Grade Road
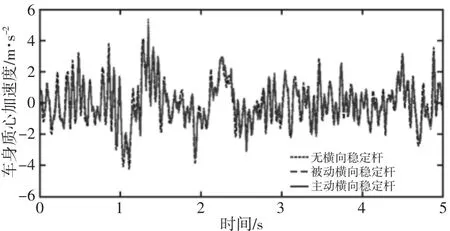
图9 车身质心加速度Fig.9 Body Acceleration
相对于不带横向稳定杆的混合电磁悬架,带被动横向稳定杆的混合电磁悬架的车身加速度恶化了8.66%,这是由于在两侧车轮跳动不同步时被动横向稳定杆产生的抗侧倾力矩对混合电磁作动器阻尼力的执行产生干扰,如图9 所示。而由于此时车身侧倾角较小,主动横向稳定杆的刚度较被动横向稳定杆小得多,因此主动横向稳定杆可最大程度的保留混合电磁悬架半主动控制提高车身舒适性的效果。
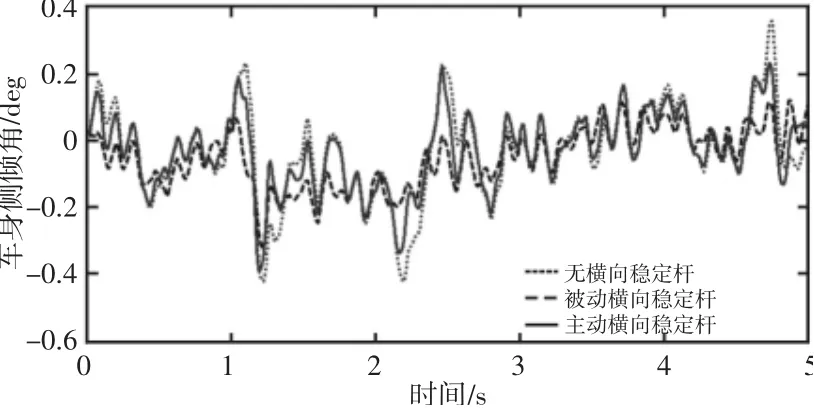
图10 车身侧倾角Fig.10 Roll Angle
相对于不带横向稳定杆的混合电磁悬架,带被动横向稳定杆的混合电磁悬架的车身侧倾角提高31.25%,而带主动横向稳定杆的混合电磁悬架的车身侧倾角仅提高18.75%,这是由于对横向稳定杆进行模糊比例控制使得在匀速直线行驶时横向稳定杆的抗侧倾能力减弱,如图10 所示。正常情况下,车辆在匀速直线行驶时车身侧倾角较小,有无横向稳定杆对乘客的舒适性影响不大,因此主动横向稳定杆较被动横向稳定杆,在车辆匀速直线行驶时并不会由于车身抗侧倾性能减弱而影响乘客的乘坐舒适性。
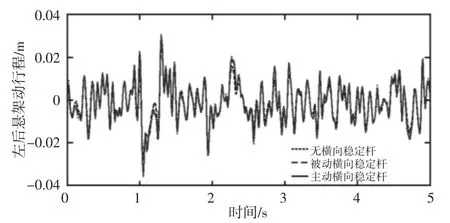
图11 左后悬架动行程Fig.11 Working Space of Suspension
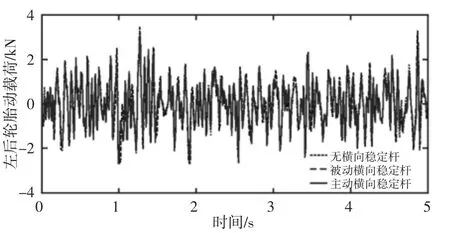
图12 左后轮胎动载荷Fig.12 Tire Dynamic Load
结合表3 与图11~图12,被动横向稳定杆可使得悬架最大动行程减小23.25%,而主动横向稳定杆对悬架最大动行程几乎没有影响,由于悬架动行程始终保持在4cm 内,远小于乘用车设计的悬架动挠度(7~9)cm,因此被动横向稳定杆对悬架的寿命并无实质性提高。对于轮胎动载荷,主动横向稳定杆对轮胎动载荷的影响几乎没有,而被动横向稳定杆使得轮胎动载荷恶化了3.78%。这同样是由于在车身侧倾角较小的情况下,被动横向稳定杆始终保持着刚度一定,其产生的抗侧倾力矩也增加了轮胎的动载荷,从而加剧了轮胎的磨损。相对于不带横向稳定杆的混合电磁悬架,带被动横向稳定杆的混合电磁悬架的馈能功率减少了11.41%,这是由于被动横向稳定杆产生的抗侧倾力矩对直线电机产生干扰,从而影响直线电机馈能功率,如图13 所示。由于主动横向稳定杆此时刚度较小,产生的抗侧倾力矩有限,因此带主动横向稳定杆的混合电磁悬架的馈能功率几乎没有损失。
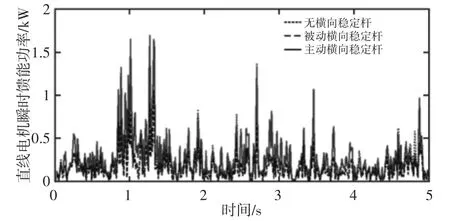
图13 直线电机瞬时馈能功率Fig.13 Recycled Energy of Linear Motor
4.2 开环转向性能仿真
为了验证主动横向稳定杆在转向工况下抗侧倾的能力,分别对无横向稳定杆的半主动混合电磁悬架车辆、带被动横向稳定杆的半主动混合电磁悬架车辆以及带主动横向稳定杆的混合电磁半主动车辆进行开环转向性能仿真。角脉冲转向仿真时车速以60km/h 匀速行驶,(0~2)s 内方向盘转角保持0°不变,在2s 时将方向盘转至150°后迅速回正,整个过程用时0.5s,之后继续保持在0°内。方向盘角度,如图14 所示。在角脉冲转向过程中带有主动横向稳定杆的混合电磁悬架,虽然车身侧倾角较被动横向稳定杆并未减小多少,但系统到达稳态的调整时间减少了84%,因此被动横向稳定杆更小,带有主动横向稳定杆的混合电磁悬架在角脉冲输入时系统的收敛速度更快,如图15 所示。
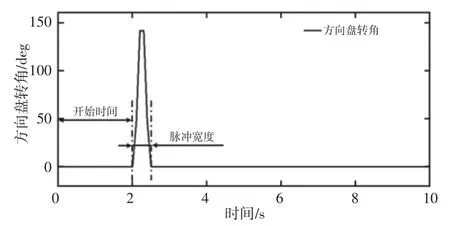
图14 角脉冲转向过程方向盘角度Fig.14 Steering Wheel Angle of Impulse Steer
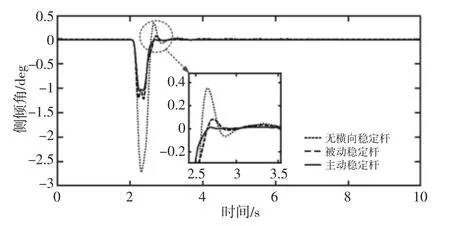
图15 角脉冲转向过程车身侧倾角Fig.15 Roll Angle of Impulse Steer
斜坡脉冲转向仿真时车辆以60km/h 匀速行驶,在第3s 时方向盘右转,并以每秒20°的速度增加方向盘转角。方向盘角度,如图16 所示。由图17 及表5 可知,在斜坡脉冲转向过程中当侧倾角较小时,主动横向稳定杆侧倾刚度较小,对侧倾角抑制没有被动横向稳定杆好。例如第5s 时,被动横向稳定杆较主动横向稳定杆,侧倾角小15%。但当侧倾角角度过大之后,主动横向稳定杆侧倾刚度急剧增加从而使得对侧倾角抑制效果更加明显,例如第10s 时,被动横向稳定杆较主动横向稳定杆,侧倾角增加21%。

表4 角脉冲转向过程仿真结果Tab.4 The Simulation Results of Impulse Steer
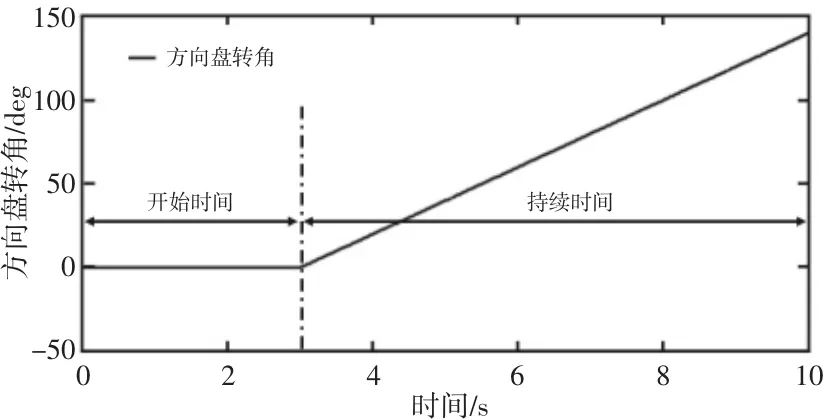
图16 斜坡脉冲转向过程车身侧倾角Fig.16 Steering Wheel Angle of Ramp Steer
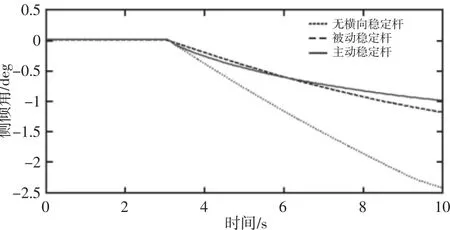
图17 斜坡脉冲转向过程车身侧倾角Fig.17 Roll Angle of Ramp Steer

表5 角脉冲转向过程仿真结果Tab.5 The Simulation Results of Ramp Steer
5 结论
(1)通过Adams/Car 建立了整车底盘多体动力学模型以提高仿真精度,在Simulink 中建立了主动横向稳定杆及混合电磁悬架控制系统,从而实现Adams-Simulink 联合仿真。(2)提出了一种基于主动横向稳定杆的半主动混合电磁悬架侧倾控制方法。通过改进天棚控制策略实现对混合电磁悬架的控制,可减少车身垂向振动的同时最大限度的提高能量回馈量;通过对主动横向稳定杆进行模糊比例控制,可实现主动稳定杆的抗侧倾刚度可调,从而适应不同的需求,能够更好配合混合电磁悬架工作。(3)仿真结果显示,配有主动横向稳定杆与配有被动横向稳定杆的半主动混合电磁悬架相比,在匀速直线行驶时,车身加速度优化7.81%、馈能功率提高11.98%,因此能够更好的发挥混合电磁悬架提高乘坐舒适性以及能量回馈特性;在转向工况下,系统达到稳态时间减少了84%,且当侧倾角过大时,车身侧倾角能够减小21%。
