磁流变式驾驶室悬置系统隔振研究
2020-07-22王孝鹏
王孝鹏
(1.三明学院机电工程学院,福建 三明 365004;2.机械现代设计制造技术福建省高校工程研究中心,福建 三明 365004)
1 引言
驾驶室悬置系统的优劣关系到驾乘人员的乘坐品质感受;国内商用货车驾驶室多采用四点全浮支撑,即驾驶室前后端分别采用对称的弹簧与阻尼器进行支撑。以(6×4)底盘为基础的商用牵运引货车及工程车辆常在国、省、乡道路面(减速带较多,即为阶跃或者正弦路面信号输入)及极差的工地路面运行,舒适性差,主动驾驶室悬置系统可以有效的改善垂向振动特性,提升乘坐舒适感。驾驶室隔振研究文献主要如下:(1)对悬置系统结构(与车架与驾驶安装位置)及类型(连接方式)、进行优化,减小振动特性;(2)保持悬置系统结构不变,对悬系系统中的弹簧刚度、减震器阻尼特性及于衬套刚度进行优化,提升驾驶室舒适感;(3)采用主动悬置系统并结合相关算法进行匹配,其中主动悬置多为磁流变及空气弹簧,相应匹配算法较多,但多局限于驾驶室单一运行工况理论,实际应用效用甚微。文献[1]用遗传算法辨识磁流变驾驶室悬置系统相关参数,控制算法为状态反馈最优算法,但驾驶室模型仅为二自由度弹簧质量系统,不能反应驾驶室的真实工作状态;文献[2]采用ADAMS 建立驾驶室多体动力模型,控制算法分别为PID 与模糊最优控制并采用实验进行验证,从控制结果看,模糊最优算法相对PID 较好,但依然避免不了定点冲击造成的瞬间震荡,侧倾角速度比被动悬置大,有滞后效应;文献[3]采用模糊控制算法对空气悬架刚度进行控制,驾驶室模型基于整车平台建立,但阻尼器与车身及驾驶室连接处的衬套特性并没有考虑,路面输入为单一工况;文献[4-10]主要采用优化方法对悬置刚度,阻尼特性,驾驶室结构模态,系统间匹配等特性进行优化,降低振动;针对驾驶室振动特性,论文基于整车平台建立主动驾驶室模型,此模型更能反映驾驶室真实运行状态,同时又可以进行系统间参数的匹配;提出模糊PID-D 耦合算法,用车身加速度判别路面状态,对PID 算法中的微分系数进行在线自适应实时调节,避免在较差路面及减速带路面造成的定点冲击,适合多工况路面输入特性,提升驾驶室乘坐品质感,具体研究方案,如图1 所示。
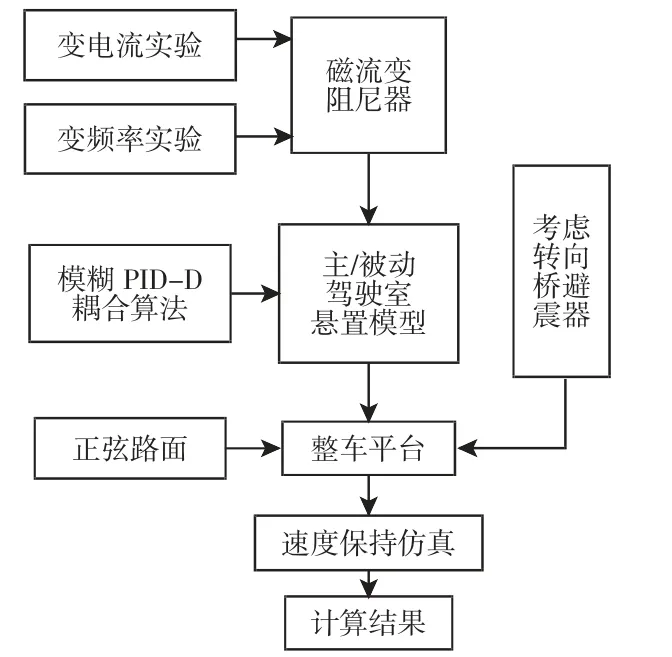
图1 研究方案Fig.1 Research Plan
2 驾驶室模型
驾驶室模型,如图2 所示。驾驶室前后悬置系统结构关于纵轴对称,前悬置系统支撑架与驾驶室通过柔性衬套连接,磁流变阻尼器上端与驾驶室柔性衬套连接,下端与车架用柔性衬套连接,前左右支撑架采用柔性稳定杆连接,稳定杆采用Beam 梁法建模;后悬置系统支撑架与车身采用柔性衬套连接,支撑架与车架之间安装磁流变阻尼器;经计算驾驶室多体模型共包含120 个自由度。驾驶总质量为786kg,X轴方向转动惯量为:9.38E8kg·mm2;Y轴方向转动惯量为:7.07E8kg·mm2;Z轴方向转动惯量为:8.18E8kg·mm2。
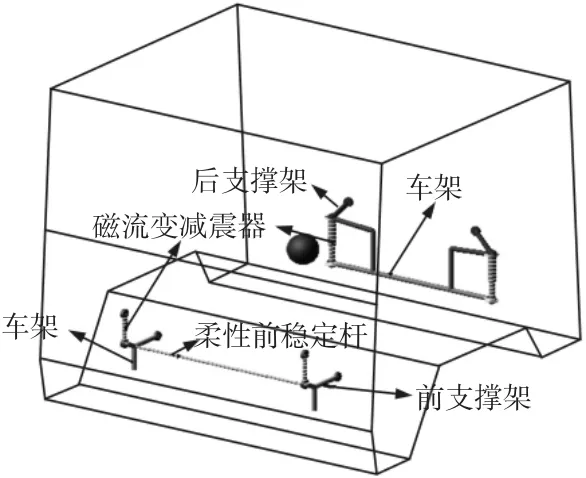
图2 主动驾驶室模型Fig.2 Active Cab Model
2.1 磁流变阻尼器实验
磁流变阻尼器实验的目的是为了获取阻尼力特性曲线,把阻尼力数据编制成ADAMS/car 属性文件输入到减震器部件中,此时减震器变具有磁流变阻尼器的特性。
2.1.1 振动台
磁流变阻尼器的阻尼性能测试采用的是低频电液伺服振动台,振动台的主要技术参数如下:频率范围是(0~50)Hz;最大振幅为0.025m;平台质量约500kg;最大负载质量约200kg。电液伺服激振器由电动激振器、液压伺服阀和液压缸组成,电液伺服激振器接受伺服放大器的信号产生相应的动作,推动操纵阀控制功率阀的位置,压力油经过功率阀送入油缸,驱动工作台产生与原始信号相对应的运动。磁流变阻尼器在振动台上上安装,如图3 所示。设定振动台架运动范围:(0.01~0.04)m;速度:(0.063~0.38)m/s;磁流变阻尼器的初始位置在阻尼器行程的中间。
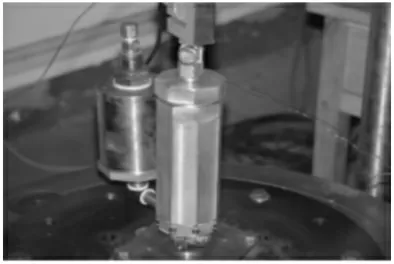
图3 振动台与阻尼器试验台Fig.3 Shaking Table and Damper Test Bench
2.1.2 变电流阻尼器特性
保持振幅和频率不变的情况下,对磁流变阻尼器线圈输入分别输入I=0A、1A、2A、3A 的电流。设定振幅a=0.01m,频率f=1Hz;测出阻尼系数特性曲线,如图4 所示。
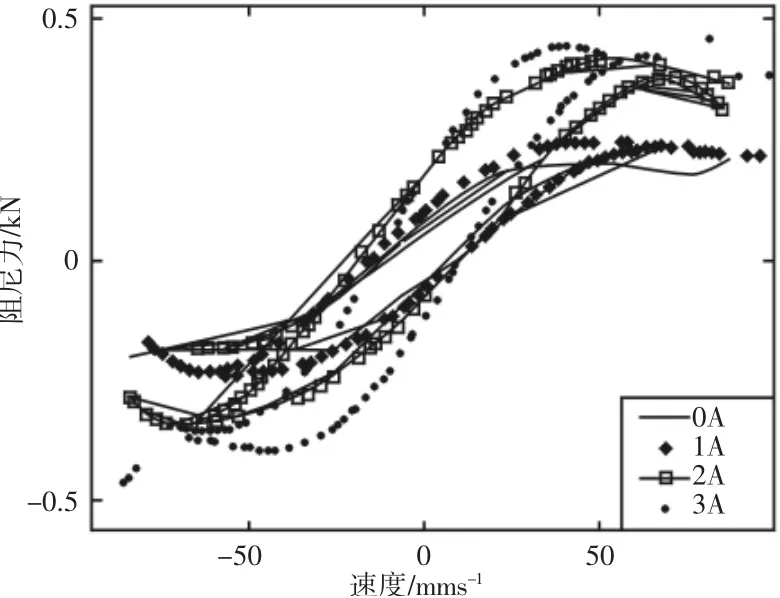
图4 阻尼力与速度特性图/变电流Fig.4 Damping Force and Speed Characteristic Diagram/Variable Current
2.1.3 变频率阻尼器特性
保持输入电流I=1A、振幅a=0.01m;电流频率分别设定为:f=1Hz、2Hz、3Hz 条件下的阻尼特性的测试,如图5 所示。
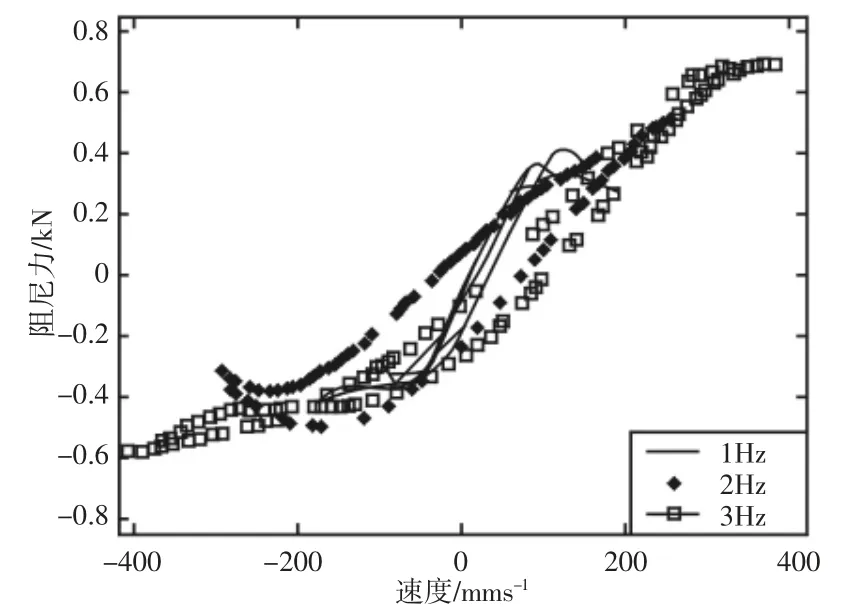
图5 阻尼力与速度特性图/变频率Fig.5 Damping Force and Speed Characteristic Map/Variable Frequency
2.3 整车平台
相对于独立的驾驶室模型,整车平台环境下研究驾驶室的动态特性更符合驾驶室真实的工作状态;整车平台下可以详细的考虑驾驶室与其它系统的匹配特性,同时可以考虑不同的路面特性;整车平台下的缺点是建模工作量较大,系统的匹配与调试较为复杂,计算量大。整车平台,如图6 所示。包含车架、推杆式平衡悬架、前转向悬架,右舵转向系统、制动、动力传动及及轮胎多个系统,整车共包含977 个自由度。
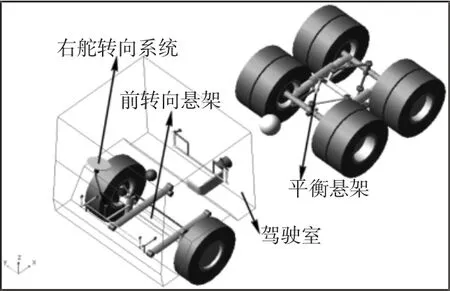
图6 整车平台Fig.6 Vehicle Platform
3 模糊PID-D 耦合算法
(6×4)驱动底盘形式主要用于工程车辆和商用牵引车,工程车辆一般工作路面较差,牵引车多在国道及高速路面运输。对于不同的路面工作状态,驾驶室输出的振动特性不同;当工作路面较差且整车运行速度较小时,输入信号等同与阶跃信号,在驾驶室主动悬置系统控制过程中会造成定点冲击,增加驾驶室的瞬间振动;对于固定的路面信号输入,微分先行PID 控制可以有效的改善瞬时定点冲击现象,但当路面输入改变时,已调整好的系统调节参数已不适用,针对此问题提出模糊PID-D 耦合算法,通过车身加速度判定路面的输入状态,然后通过模糊算法在线自适应调节PID-D 微分系数,使整车在各状态运行时都可以适度的减小及避免定点冲击,改善驾驶室的舒适性。以左前磁流变阻尼器为例,模糊PID-D 耦合算法公式推导如下:
式中:e(t)—输入输出之间误差;
y(t)—驾驶室与阻尼器连接处垂向速度;
KP—缩放系数;
KI—积分系数;
Kd1—误差反馈预设微分系数;
Kd2—输出反馈预设微分系数;
F1、F2—微分在线调节系数,由模糊算法根据路面状态输出;
u(t)—磁流变阻尼器输出控制力;
Ω(VZ)—模糊控制规则。
微分在线调节系数由模糊算法输出,输入为车身垂向加速度,系统模糊控制规则,如表1 所示。建立好的模糊PID-D 控制系统,如图7 所示。
车身垂向加速度论域:

量化因子:

表1 微分系数调节模糊规则Tab.1 Differential Coefficient Adjustment Fuzzy Rule
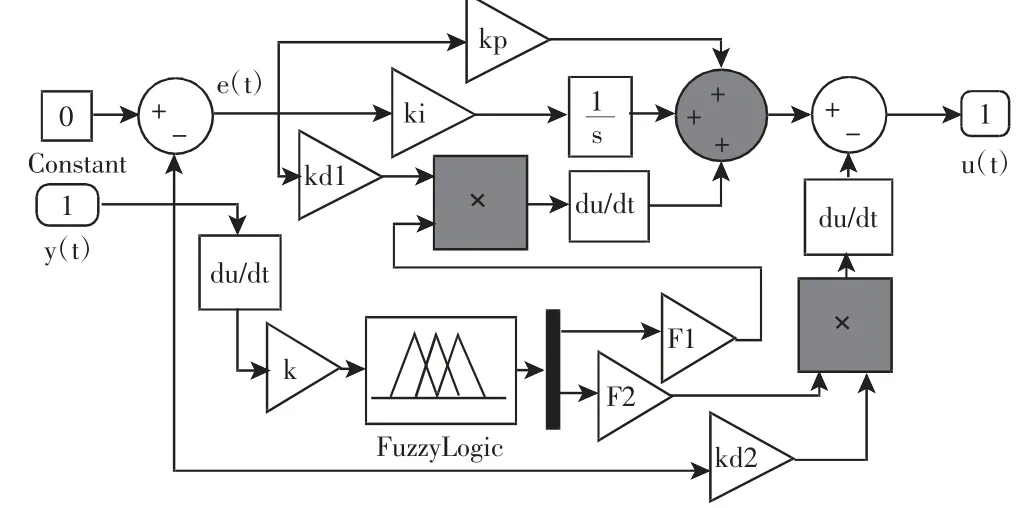
图7 模糊PID-D 系统Fig.7 Fuzzy PID-D System
4 机控联合仿真
4.1 路面模型
按要求编制连续正弦波路面文件谱,波纹路面宽2m,路面摩擦系数为0.9,路面垂向峰值为10mm,波长8m,路面特征为“sine”,波纹路面无偏移;编制好的正弦波路面,如图8 所示。
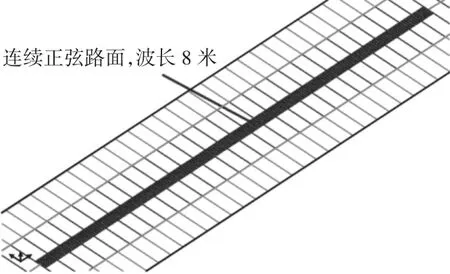
图8 正弦路面模型Fig.8 Sinusoidal Pavement Model
4.2 速度保持仿真
整车保持匀速直线行驶状态,速度40km/h,方向盘锁定,仿真计算时间为10s。计算结果,如图9~图11 所示。图中:passive—常规阻尼器仿真结果曲线;active—磁流变阻尼器仿真结果曲线;驾驶室垂向加速度改善明显,极值从1026.98 降低为403.50,均方根值从415.65 降低为107.47,垂向加速度极值与均方根性能分别提升60.71%,74.14%;驾驶室横摆角速度极值从0.0224 降低为0.0173,均方根值从0.0074 降低为0.0050,横摆角速度极值与均方根性能分别提升22.77%,32.43%;驾驶室侧倾角速度极值从1.4662 降低为0.7720,均方根值从0.3195 降低为0.2720,侧倾角速度极值与均方根性能分别提升47.35%,14.87%。
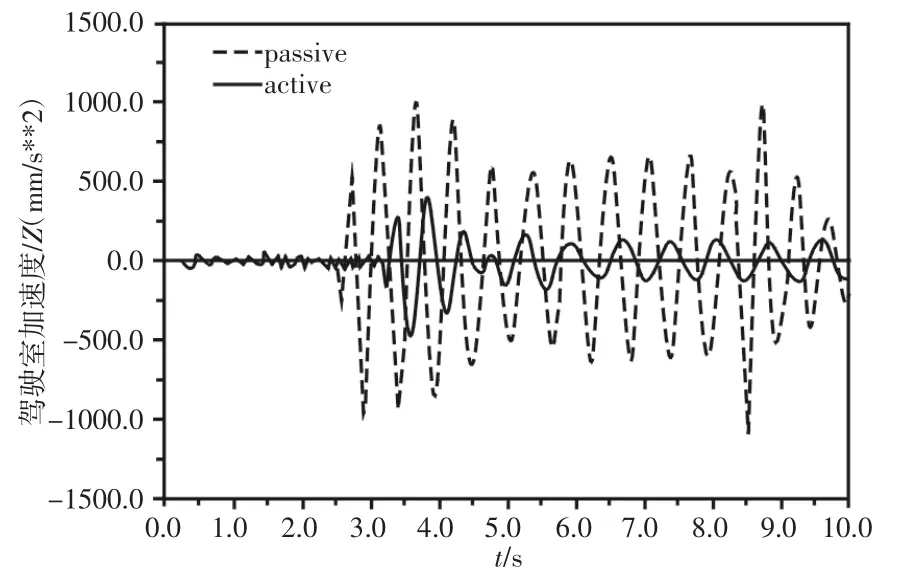
图9 驾驶室垂向加速度/ZFig.9 Cab Vertical Acceleration/Z
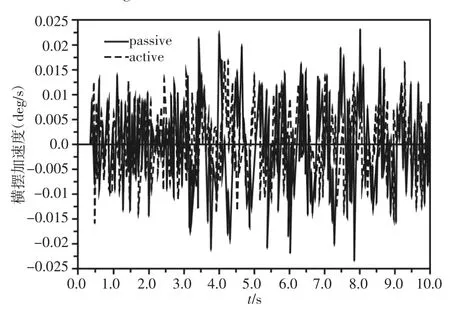
图10 驾驶室横摆角速度/Z Fig.10 Cab Yaw Rate/Z
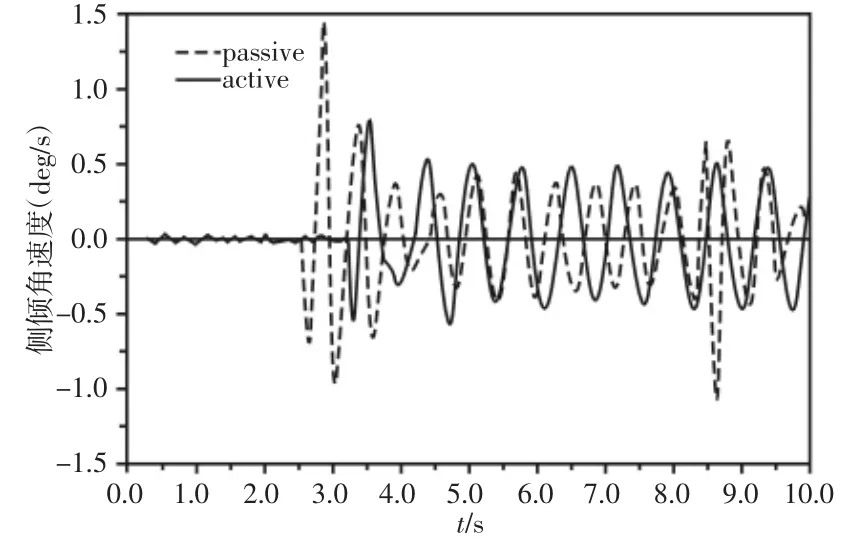
图11 驾驶室侧倾角速度/X Fig.11 Cab Roll Angle/X
4.3 转向桥阻尼器
牵引车轴距较长,同时转向桥板簧刚度相对后轴平衡悬架刚度要小很多,在经过坑洼路面时导致整车的俯仰角过大,因而导致安装在车架上的驾驶振动过大;针对此问题,提出在转向桥加装阻尼器,阻尼器安装位置,如图12 所示。
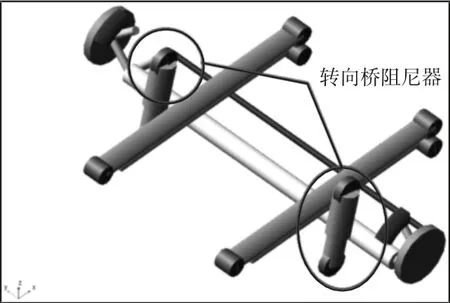
图12 转向桥阻尼器Fig.12 Steering Bridge Damper
更换驾驶室阻尼器特性文件为变频率实验数据,如图5 所示。按同工况进行速度保持仿真,车身垂向加速度计算结果,如图13、图14 所示。auxiliary 为转向桥加装阻尼器仿真结果曲线;驾驶室垂向加速度极值为243.57,均方根值为37.54,驾驶室在磁流变主动阻尼器的基础上极值与均方根性能继续提升39.64%、65.07%;功率谱显示在全频域范围内,驾驶室性能均提升,低频段改善明显。
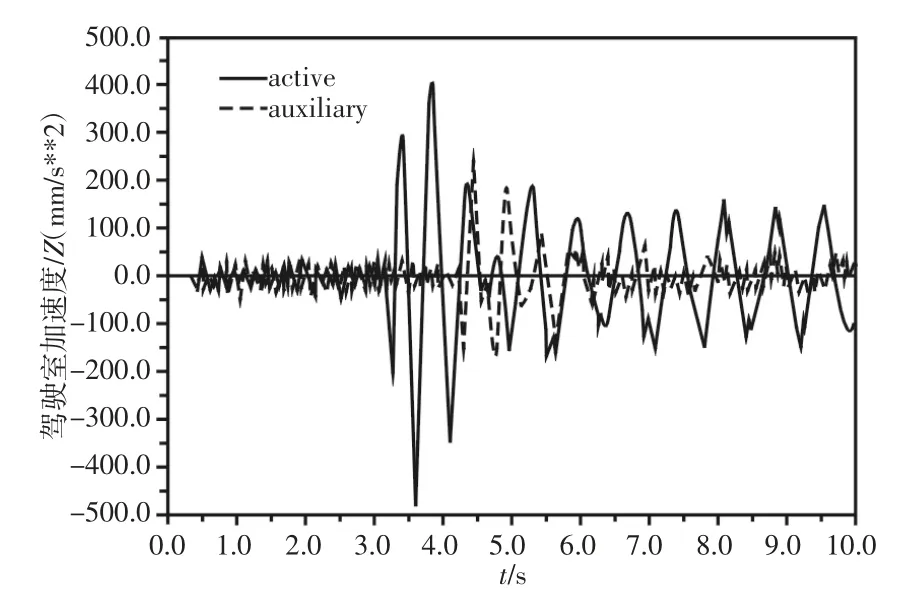
图13 驾驶室垂向加速度/阻尼器Fig.13 Cab Vertical Acceleration/Damper
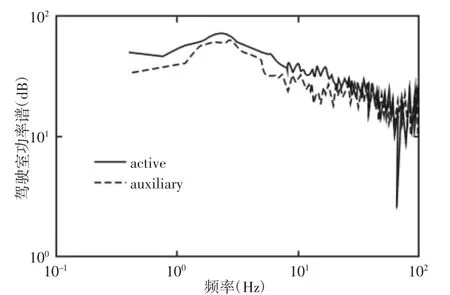
图14 驾驶室垂向加速度功率谱Fig.14 Cab Vertical Acceleration Power Spectrum
5 结论
(1)磁流变阻尼器变电流实验表明:随着电流的的增加,阻尼力增加,阻尼特性为非重合曲线;变频率实验表明,随着频率的增加,阻尼力亦增加,同时阻尼器有效工作区域范围增加,适当提升阻尼器工作频率对系统有益;
(2)采用模糊PID-D 耦合算法后,驾驶室垂向加速度、横摆角速度,侧倾角速度指标参数均有改善,其中驾驶室垂向加速度改善较为明显,垂向加速度极值与均方根性能分别提升60.71%,74.14%;
(3)转向桥加装阻尼器后,驾驶室在磁流变主动阻尼器的基础上极值与均方根性能继续提升39.64%、65.07%;功率谱显示在全频域范围内提升,低频段改善明显;
(4)整车平台下研究驾驶室与其它系统匹配、优化等特性对于车辆理论及工程研究均具有指导意义。
