一种全新的娱乐卡丁车转向机构优化设计
2020-07-19李叶松梁风勇
李叶松,梁风勇
(深圳市怡安机械科技有限公司,广东深圳 518115)
1 娱乐卡丁车转向系统结构与布置及不足
娱乐卡丁车的转向系统是布置在前后轴之间,靠近前轴位置。鉴于空间与人机工程考虑,转向柱夹持在驾驶者两腿中间,转向拉杆小心安置在驾驶者小腿下方,车架被迫往前延伸,以布置刹车与油门踏板(图1)。

图1 娱乐卡丁车整车布置数模图
从此种布置以及通过分析卡丁车转向系统的结构(图2),可以直观地看出存在以下3 个问题。
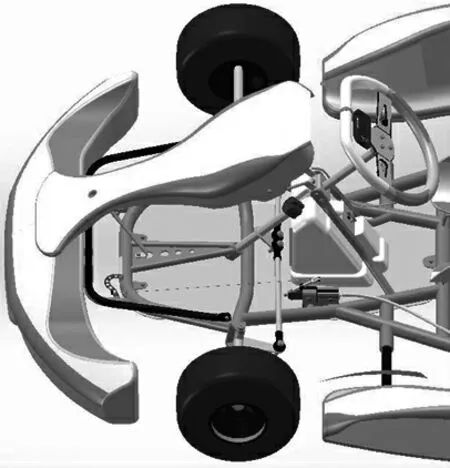
图2 娱乐卡丁车转向系统布置
(1)驾驶者整个被“井田制”地架置于狭小的空间之间,坐姿基本被固定,毫无弹性空间可言,上下车也极不方便且存在安全隐患。这是因为受制于传统转向系统的结构,转向柱必须位于两腿之间,转向拉杆必须位于驾驶员小腿屈膝下方。
(2)转向柱俯仰角度的调整量很小,轻微的调整就容易导致转向拉杆与驾驶员小腿或者车架底板形成干涉,无法迎合不同身高驾驶者的需求。
(3)这种转向系统使得卡丁车需要往前延伸车架来布置刹车和油门踏板,因此在轴距一定的情况下,车身长度会加长。
鉴于娱乐卡丁车转向机构及布置方式存在的上述问题,本文提出了一个全新的替代方案——前梯交叉臂几字勾转向机构。
2 新型转向机构布置方案及优点
本文提出的新方案具体结构及其布置形式如图3 所示:整套转向系统(除方向盘和转向柱外)布置在车架前端,且位于驾驶前舱外。
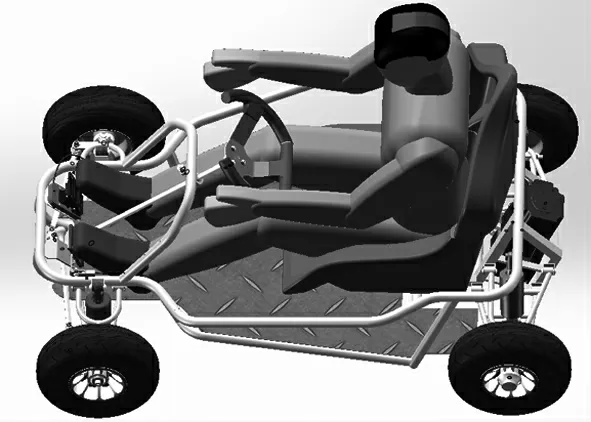
图3 新型卡丁车整车布置数模图
全新转向机构相较于娱乐卡丁车转向机构而言,具有以下3 个优点。
(1)转向机构移出驾驶前舱,腾出了更多的前舱空间,给予了驾驶者更为舒适自由的驾驶感,同时使上下车动作变得更便捷起来。
(2)转向摇臂与转向柱的端部相连接,调整转向柱俯仰角度时,转向摇臂的上下摆动幅度较传统卡丁车布置方案小很多(图4)。转向摇臂和转向拉杆前移之后,拥有足够的上下活动空间,所以在调整方向柱角度的过程中并不存在干涉问题。这样,方向柱俯仰角度调节范围变大,不同身高的驾驶者坐姿的可调性增强。

图4 新型卡丁车转向系统布置
(3)由于新方案的转向系统(除了方向盘和转向柱)被抬高布置在车头前端,大大缩减了转向系统所占的空间。因此,在轴距一定的情况下,此方案能有效缩短车身长度。
3 方案介绍
为了使本方案的机构原理和结构布置更加清楚呈现,下面结合附图进行详细介绍。
3.1 动作原理
如图5 所示,当车辆转向时,驾驶员通过操纵方向盘,转动转向柱,在所施加的转向力矩的作用下带动几字勾转向摇臂转动,使左转向横拉杆、右转向横拉杆一个受压、一个受拉,并随之移动,左转向拉杆、右转向拉杆的外端通过弯杆球头分别带动左转向节臂、右转向节臂和转向节绕主销转动,从而使转向轮偏转一定角度,实现转向。
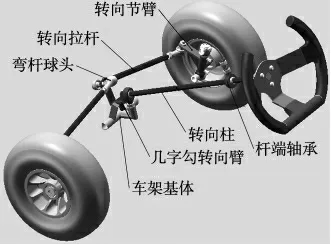
图5 新型转向机构的三维数模图
3.2 布置描述
通过独特的几字形转向摇臂设计,两根转向拉杆(左转向横拉杆和右转向横拉杆)交叉布置(图6),使得在转向摇臂可以做得更小巧,方便布置。同时,在保证强度的情况下,适当腾让出两个弯杆球头的运动空间,避免干涉。而在几字勾转向摇臂上还设计了一种限位结构,即所述转向摇臂的下方连接有一根限位杆,以及两个相对设置且固定连接于车架的限位挡块。限位杆的端部位于两个限位挡块之间,通过此结构控制和调整转向车轮偏转的角度,不使车轮转向角度过大。
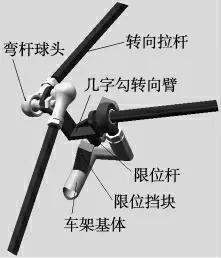
图6 新型转向机构的局部数模图
4 转向机构动力学验证
4.1 转向机构动力学验证的目的
之所以要进行转向机构转向运动的动力学验证,是为了确保转向过程中两侧车轮转角偏差(阿克曼角)接近理论数值。从而实现车辆在转向过程中的流畅、平顺,以及减少轮胎的磨损。
4.2 转向机构动力学模型建立(图7)
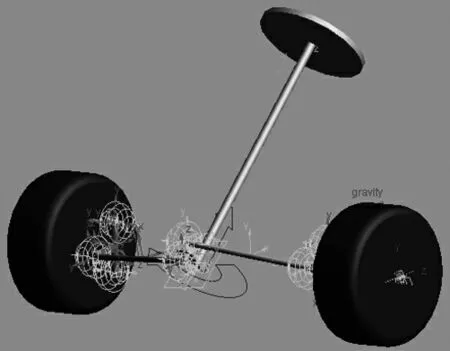
图7 新型转向机构的动力学模型
首先在CAD 软件中采集硬点,然后把硬点导入到ADAMS/View 中。导入完成后,分别创建车轮、转向节、转向拉杆、转向柱等部件,接着建立合理的运动副对各部件进行约束,最后验证模型是否有错误。
4.3 转向机构的仿真分析
首先在转向柱上添加一个旋转驱动然后开始仿真,仿真完成后建立两个测量函数分别检测左右两个车轮的转动角度,最后查看结果图表(图8、图9)。
接下来进行仿真结果和理论数值的对比分析,理论转向阿克曼角可以结合车辆轮距轴距等参数计算得出,也可以通过绘制转角偏差示意图的方法得出(图10)。
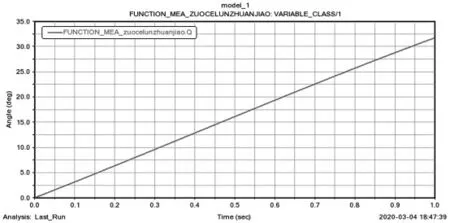
图8 左侧车轮转角动力学仿真图
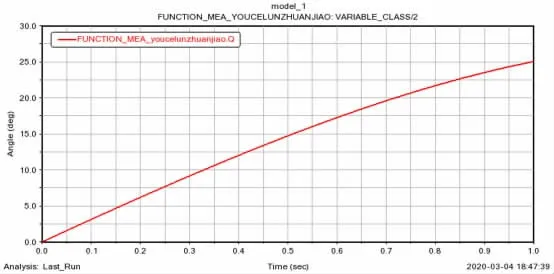
图9 右侧车轮转角动力学仿真图
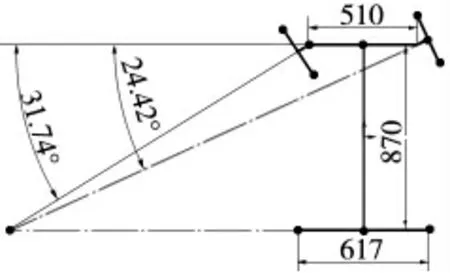
图10 转角理论偏差示意
通过对比可以看出,仿真结果与理论数值相差不大,最大转角下的阿克曼角仅相差0.62°,满足设计需求。
5 结束语
通过新方案的结构分析和动力学分析得到如下结论:
(1)新的转向机构及布置方案取代娱乐卡丁车转向结构和布置方案完全可行。
(2)新型卡丁车拥有更舒适,宽阔的前舱空间。而且由于其坐姿调整空间大,在轴距一定的情况下,能有效缩短车长,使得其适应的人群更为广阔,同时也拓宽了市场。
(3)通过仿真模型计算并验证了车辆的转向动力学性能,确保了转向过程中两侧车轮转角偏差(阿克曼角)接近理论数值。
目前该转向机构在某司定型卡丁车中已批量应用与生产,充分验证了该机构的先进性、经济性和可靠性。该转向机构已申请发明专利,发明专利号为ZL201720068051.7。
在研究的过程中还发现,此方案仅适用于娱乐卡丁车,并不适用于竞速卡丁车;其布置形式虽然使得前舱空间变得更为宽敞舒适,但却牺牲了腿部的包裹性,因此对于完善该方案还有待探讨。
