人工智能专业的自动控制原理课程教学改革
2020-07-18徐文霞于宝成赵彤洲卢涛
徐文霞 于宝成 赵彤洲 卢涛
[摘 要] 針对人工智能专业课程体系设置与传统工科专业的不同,在自动控制原理授课过程中,将机器人实例贯穿整个课程的教学中,通过问题驱动的教学方法,让学生学以致用,提高了学生分析和解决问题的能力。
[关键词] 机器人;自动控制原理;人工智能专业;教学改革
[作者简介] 徐文霞(1986—),女,湖北武汉人,博士,武汉工程大学计算机科学与工程学院讲师,博士,主要从事智能机器人相关研究;于宝成(通信作者)(1974—),男,博士,武汉工程大学计算机科学与工程学院副教授,主要从事机电一体化相关研究。
[中图分类号] G642 [文献标识码] A [文章编号] 1674-9324(2020)25-0221-02 [收稿日期] 2020-02-26
一、引言
自动控制原理是电类专业,如电气工程、自动化等专业非常重要的基础课程。自动控制技术也是各类工业生产、高新技术产品生产等行业的关键及核心技术,因此自动控制原理课程对于各个行业的发展都有着至关重要的作用[1]。
人工智能相关专业的载体是智能机器人,而机器人控制系统是一个非常典型的自动控制系统,它具备感知、决策、执行的能力,是一个典型的闭环控制系统。对于人工智能专业学生,学习自动控制原理是十分必要和重要的。人工智能专业属于新兴学科,是计算机、自动化、信息技术等专业的综合体,是一个综合性的学科[2]。但是自动控制原理课程的学习需要数学、物理以及电学学科的知识,而人工智能专业的课程系统不可能完全把这些学科知识包含到其中,所以人工智能专业的自动控制原理课程的教学应该根据该专业的课程体系设置,以及该专业学生的实际情况进行适当的调整与改革。
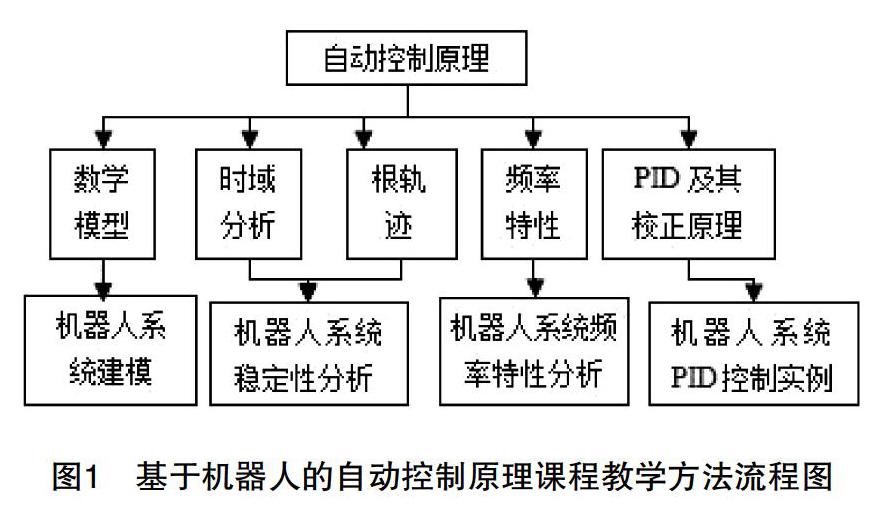
提出人工智能专业的自动控制原理课程的教学改革方法,将机器人作为自动控制原理课的应用实例,贯穿到整个课程的教学知识点中,建立“问题为驱动”的教学方法,提高学生对课程理论知识的理解和实际运动能力。该教学方法内容结构如图1所示。
二、课程教学现状
目前对于人工智能专业,自动控制原理课程教学目前存在两个问题。一是自动控制原理课程的学习需要自然、物理和电学相关知识作为基础,而人工智能专业是一个综合性学科,专业体系设置不可能全面覆盖该课程所需基础理论知识,导致学生在学习的过程中,缺少相应的理论基础;二是传统的教学模式是围绕知识点进行教学,但是这种方法缺乏灵活性,难以激发学生的学习兴趣,而且不能培养学生的创新能力[3]。
针对以上问题,在自动控制原理的课程教学中,以机器人系统作为研究对象,要适当削弱或者减少对物理系统、电学系统基础知识的依赖。机器人控制系统是一个非常典型的自动控制系统,机器人控制系统可以进行系统建模、系统的性能分析、稳定性分析,以及系统的稳定性改进。所以在课程的教学过程中,将一种机器人的应用贯穿整个课程的教学中,这样可以增加课程知识点之间的逻辑性,帮助学生理解知识点以及知识点的应用方法。同时增加机器人相关视频以及在线网络课程,引进先进的机器人技术,激发学生的学习兴趣,增强学生的创造力,提高学生对工程问题的分析和解决能力。
三、课程内容教学体系
自动控制原理课程的主要内容包括系统建模、时域分析、跟轨迹分析、频域分析以及PID控制,主要分析系统的动态性能、稳态性能以及频率特性等,根据控制对象的控制目标对系统进行分析、设计和优化。针对人工智能专业的学生,以机器人为研究对象,将机器人系统的系统分析和设计实例整合到课程的各个主要内容中,培养和提高学生对自动控制原理课程的理解、系统的分析和设计能力,为后续的人工智能相关课程打下坚实的基础。
1.机器人系统数学建模。数学建模是控制的基础,建模的意义在于定性和定量的表达系统的运行规律和物理属性,并为后续的系统分析和设计提供控制方法。以工业机器人作为对象,通过分析工业机器人的运动学规律,建立工业机器人的运动学模型,得到工业机器人的末端执行器位置和机械臂关节选择角度之间的关系,从而建立工业机器人的运动模型。
2.机器人系统稳定性分析。机器人电机具有饱和非线性特性,所以对机器人系统来说,需要分析电机的饱和非线性影响下系统的稳定性。机器人系统的非线性环节的特性曲线和线性环节的奈奎斯特曲线之间的关系可以分析系统的稳定性。
3.机器人系统频率特性分析。机器人系统是一个综合性系统,包含一些结构复杂的子系统,对于这种子系统,采用一般方法很难建立其模型,所以根据频率响应实验的数据绘制系统的伯德(Bode)图,确定该系统所包含的典型环节,得到该系统的频率特性,最后使用算子替换的方法得到该系统的数学模型,完成该系统的系统辨识任务。
4.PID控制及其校正。PID控制是控制系统最常见的控制方法,以工业机器人作为实例,为其设计PID控制方法,调节三个控制参数KP,KI和KD,通过控制机械臂关节角度来实现机械臂末端执行器的轨迹控制。
四、小结
针对人工智能专业的学生,在自动控制原理授课过程中,提出了问题驱动的方法。在课程的各个章节中设计以机器人为对象的解题任务,增强了各个章节的逻辑性,激发了学生的学习兴趣,提高了学生的分析和解决问题的能力。
参考文献
[1]郑艳.“自动控制原理”混合式教学模式探索及教学实践[J].电气电子教学学报,2019,41(6):44-48.
[2]罗家祥.自动化专业理论课程课堂教学中的三层互动设计[J].电气电子教学学报,2019,41(4):115-117.
[3]海涛,赵娟,李伟洪.面向创新能力培养的自动控制原理教学方法研究[J].中国教育技术装备,2015,12(24):90-92.
Abstract: In view of the difference between the artificial intelligence major curriculum system setting and the traditional engineering majors, the examples of robot run through the entire teaching process of Automatic Control Theory. Through problem-driven teaching methods, students can learn to apply and improve their abilities of analyzing and solving problems.
Key words: robot; Automatic Control Theory; the major of artificial intelligence; teaching reform
