挥舞旋转运动薄板磁弹性振动分析
2020-07-16冯小庭王航史骏
冯小庭,王航,史骏
(西安铁路职业技术学院,陕西 西安 710026)
0 引言
在复杂物理场中的薄板振动分析可以指导很多实际问题。例如在热场、流场中做旋转运动的透平机械,其叶轮的振动可以简化为旋转运动薄板的振动。有大量的文献涉及导电物体的磁弹性振动分析,其中不乏作轴向运动薄板的磁弹性振动研究,亦有大量的学者研究了作旋转运动梁、板的振动分析。文献[1-9]分别对非线性振动特性、动力失稳特性、振动位移响板临界失稳荷载的影响做了深入研究,柔性薄板在磁场中的磁弹性振动分析已有丰富资料。作挥舞旋转运动的导电薄板的磁弹性分析尚不多见。导电材质的磁弹性分析有着现实的意义。
本文基于薄板理论,建立了旋转柔性薄板在横向磁场环境下的振动运动方程。应用Maxwell电磁定律得出导电薄板的电磁本构关系,使用Hamilton原理推导出在磁场中旋转运动薄板的动力学方程,并使用Galerkin法对方程进行离散,进一步研究挥舞旋转运动和磁场协同作用下薄板振动的特性。
1 系统建模
1.1 系统动能和势能
导电薄板在磁场中做旋转运动的模型,如图1所示。其中,惯性坐标系Oxyz,中心刚体的附体坐标系为O1x1y1z1,柔性薄板的附体坐标系为O2x2y2z2。x2轴、y2轴分别沿薄板的长、宽方向。中心刚体的半径为R,绕y1轴的转动惯量为J,板长为a,宽度为b,板厚为h。弹性模量为E,泊松比为μ,密度为ρ。薄板绕刚体中心轴线做旋转运动的角位移是θ。建立动力学方程时不计重力。

图1 系统模型示意图
薄板上任意一点P0(x,0,0)变形后的位置是P,其在浮动坐标系O2x2y2z2下的变形矢量为u=[u,v,w]T。在附体坐标系O2x2y2z2下的矢径为P点,在附体坐标系O1x1y1z1下的矢径为
r=(R+x+u)i+(y+v)j+(w)k
(1)
P点在惯性坐标系Oxyz下的矢径为
(2)
r关于时间求导,得P点的速度矢量


(3)
则系统的动能为
(4)
根据薄板理论,薄板横向变形引起轴向的缩短,得:
(4)建筑工程运维阶段应用。从全生命周期角度来看,建筑工程项目施工完成后,后期的日常运行和维护管理也至关重要。利用BIM技术能够根据建筑项目实际情况,同步获得建筑项目的使用数据,如项目容纳人员数、已使用时间、建筑财务等,以及承租人、租赁面积、收入分配、家具、设备库存等信息,根据相关信息的收集和运算,提升建筑物的经济价值,并通过相关成本运算,及时掌握建筑项目的短板和不足,提升用户体验。
(5)
计算系统势能时,忽略面内拉伸引起的变形以及中面变形,故系统势能仅是弯曲变形的应变能,即:
(6)
1.2 电磁力和电磁力矩
薄板内部的介质满足Maxwell电磁本构关系:
D=ε0E;B=μ0H;J=σ(E+V×B);f=J×B
(7)
其中:V是旋转运动薄板各点的速度矢量;磁感应矢量为B(Bx,By,Bz);电位移矢量为D(Ex,Ey,Ez);电场强度矢量为E(Ex,Ey,Ez);磁场强度矢量为H(Hx,Hy,Hz);电流密度矢量为J(Jx,Jy,Jz);ε0为真空介电常数;μ0为真空磁导率;σ为电导率;忽略扰动电场e。
设导电薄板在横向磁场中运动,即磁感应强度矢量为B(0,0,Bz)。此时单位面积所受电磁力和电磁力矩:

(8)
外力虚功为:
(9)
1.3 动力学方程
将式(4)、式(6)、式(9)代入式(10)。根据Hamilton变分原理

(10)
其中t0、t1为任意两个固定时刻。

(11)
2 振动分析
采用Galerkin法离散,设横向振动的解为
(12)
将式(12)带入变分方程式(11)中,由于广义坐标是相互独立的,故δqij的系数项分别为0。则振动方程整理为
(13)
其中广义坐标向量为:Q={q11,q12,…,q1N,…,qM1,qM2,…,qMN}T。将系统的振动方程整理为

(14)
其中:广义质量矩阵
广义坐标一次导的系数矩阵
坐标的一次项系数矩阵
广义坐标的零次项系数矩阵


3 数值计算
磁感应强度为Bz=0.1T,薄板挥舞运动角速度Ω=10rad·s-1,时长为2s,薄板长为2m,宽2m,厚0.1m,中心刚体的半径R=0.2m,弹性模量为206GPa,泊松比为0.3,密度为7800kg·m-3,M=5,N=5。中心刚体运动角速度为
(15)
式中:Ω为稳态旋转角速度;T是旋转加速运动的时间,取为2s。
图2是在磁场中作挥舞运动的薄板不同阶振动模态。其中,图2(a)是m=1,n=1阶振动模态,相比于其他阶振动模态,其横向位移比较大,这说明(1,1)阶振动是实际振动的主要成分。
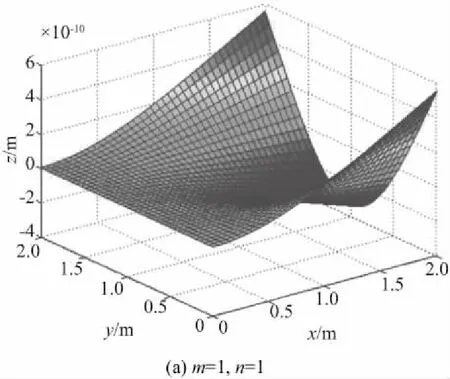




图2 1 s时振动模态
图3所示是不同时刻的横向变形位移图,可知作挥舞运动薄板在远离旋转中心的边缘处变形量最大,需要关注边缘处的疲劳强度。
当薄板绕y轴挥舞运动的角速度幅值不变且为20rad/s时,横向磁感应强度的取值依次为[0 T,0.1 T,0.2 T,0.3 T,0.4 T]时,x=a时的最大变形如图4所示。可知,发生最大变形时,边缘的变形曲线都是关于中心对称的,最大变形发生在坐标为(2,0)、(2,2)的角点处。不同的磁感应强度所对应的最大变形位移为[1.69×10-10,4.29×10-9,1.72×10-8,3.86×10-8,6.87×10-8],单位为m。可知没有横行磁场时,变形量最小。随着磁感应强度增大,薄板的振动幅值变大。



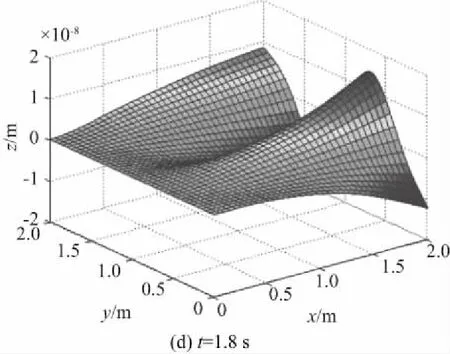
图3 不同时刻的横向变形位移
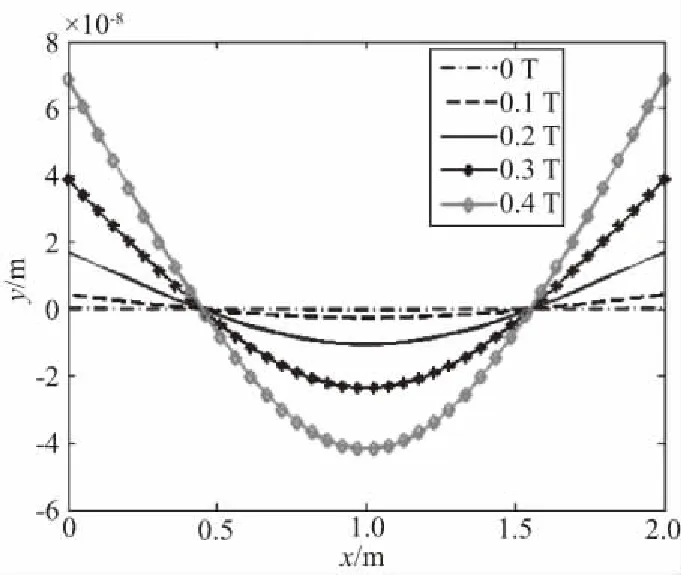
图4 x=a处的变形曲线(变形最大的时候)
当横向磁感应强度为定值0.1T时,薄板绕y轴挥舞运动的角速度幅值变化值取为[0,10,20,30,50],单位为rad·s-1,不同的磁感应强度所对应的最大变形位移为[0,4.29×10-9,1.29×10-8,2.15×10-8],单位是m。可知不旋转时,薄板没有变形。随着角速度增大,薄板的振动幅值变大(图5)。

图5 转速和最大变形量的关系
薄板的长宽之比变化时,角速度幅值为10rad/s时,横向磁感应强度取值0.1T,长宽比,即b/a=[0.1,0.2,0.5,0.7,1.0]。其最大变形如图6所示。不同的长宽比所对应的最大变形位移为[3.28×10-13,5.28×10-12,2.18×10-10,8.95×10-10,4.29×10-9],单位是m。可知,随着长宽比增大,薄板的最大振动幅值变大。
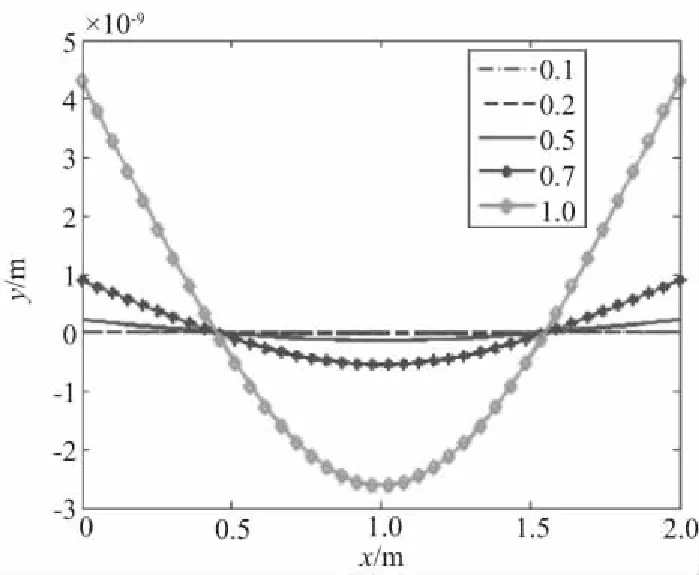
图6 板长和最大变形量的关系
4 结语
利用Hamilton变分原理,建立了在磁场中运动的薄板系统动力学方程。研究了该系统的振动特性。经过分析,得出如下结论:1) 推导了横向磁场中旋转运动薄板的非线性磁弹性振动方程。2) 薄板的振动以1阶振动为主。3) 薄板的振动幅值随着外界横向磁感应强度的增大而增大,随着旋转运动角速度的增大而增大,随着长宽比的增大而增大。4) 本文建立动力学方程的过程,可应用于其他在磁场中作旋转运动的厚板、层合板等。
