胶囊机器人主动运动机构的研究进展
2020-07-16孙志峻杨建林
孙志峻,杨建林
(南京航空航天大学 机械结构力学及控制国家重点实验室,江苏 南京 210016)
0 引言
消化道疾病是我国人群中的常见病和多发病。胃镜和肠镜的检查能够直接观察到被检部位的真实情况,并可以通过对病变部位进行病理活检及细胞学检查,从而得到进一步诊断[1-3]。但是传统的胃镜和肠镜检查方法中镜身必须从受检者口腔或者肛门进入消化道,患者在身体遭受痛苦的同时心理也会产生一定的恐惧,如果处理不当,还会造成交叉感染。
胶囊内镜因其在检查消化道病变时具有操作简单、检查方便、无痛苦、无创伤以及无交叉感染等优点,填补了胃镜和肠镜的检查盲区,扩展了消化道检查视野,尤其对可疑小肠病变具有很高的诊断价值,被医学界誉为21 世纪内窥镜发展的革命与方向[4-5]。随着人们对全肠胶囊内镜的需求越来越迫切,完全依赖消化道蠕动而被动运动的胶囊内镜已不能满足医学要求。如何让胶囊内镜成为具有主动运动能力的胶囊机器人已成为解决这一问题的关键和突破点[6-10]。
目前,在研的胶囊机器人主动运动机构主要集中于活检机构、行进与锚定机构和给药机构这三个大类。活检机构可以从人体内提取病变组织,更加方便医生的化验与诊断。已有的结构包括活检钳、活检剃刀等。行进与锚定机构是近年来胶囊机器人研究的重点,用于实现胶囊机器人在消化道内主动爬行、转向和驻留等功能,主要包括尺蠖式、磁驱动式、螺旋桨驱动等形式。给药机构主要作用是在胶囊机器人到达病变位置后进行施药操作,能够有效提高药物的利用率,降低药物副作用。
本文对胶囊机器人主动运动机构的研究作了充分的梳理与总结。重点阐述了胶囊机器人的活检机构、行进与锚定机构及给药机构等方面国内外的研究思路及方法,并根据驱动形式的不同将各类机构进行了分类;分析了这些驱动方式的优缺点,为胶囊机器人主动运动机构进一步的研究提供参考。
1 活检机构
活检机构是一种可以从人体内通过切取、钳取或刺穿等方法取出病变组织的机构。它方便医生对患者体内病变组织进行诊断和研究,了解病变,确定病变性质进而决定手术方案。胶囊机器人的活检机构还未真正用于临床,不过科研工作者对于胶囊机器人活检机构的研究从未停歇。目前胶囊机器人使用的活检机构主要分为活检钳式和活检剃刀式两类。
1.1 活检钳
胶囊机器人用活检钳一般是利用钳刀切下人体病变组织样本,并把组织样本回收进胶囊内的活检装置。不同于一般的内窥镜活检钳,它的动力由胶囊机器人内部提供而不是人力,因此对胶囊机器人用活检钳的体积和能耗要求非常高。
上海交通大学医学精密工程及智能系统研究所颜国正教授带领的团队在微创诊疗设备领域做了很多积极有效的工作,他们开发过多款带有主动运动机构的胶囊机器人。图1(a)是他们提出的一种胶囊机器人微活检机构[11],它利用带有镊子的螺母在丝杠上移动,从而使镊子可以伸出囊体夹持人体组织并回缩进囊体。该活检钳结构是微小电机通过齿轮和丝杠螺母传动将电机转动变为钳口的伸出和缩回,然后再通过铰链结构带动钳口的开合。齿轮的转动使丝杠旋转,钳口随着在丝杠上旋转的螺母伸出胶囊,进而在导槽的作用下张开。钳口收回胶囊体时,逐渐闭合,从而带着被夹持在钳口槽中的人体组织缩进胶囊内。
韩国国立全南大学的VIET Ha Le等提出的胶囊机器人微型夹持器活检装置则是利用磁铁的转动间接控制钳口的开合,并将其应用在ALICE胶囊机器人中[12]。图1(b)为胶囊机器人及其活检装置的实物图。活检装置由一个带有两个刀片的活检钳和一个微型齿轮箱组成。通过磁铁的旋转带动齿轮箱中的齿轮转动,齿轮机构可将磁体的转动力矩传递给夹持器,从而打开或关闭活检钳,进而提取活检组织。
图1(c)所示是哈尔滨工业大学的PAN X等提出的带倒齿微型活检钳[13]。该活检钳长度仅为3.35mm,倒齿宽度仅为0.2mm,通过齿轮齿条机构带动活检钳伸出缩回进行活检操作。哈尔滨工业大学的YE D等在胶囊机器人中安装微型活检钳,利用磁驱动活检钳伸出缩回[14]。利用限位机构,使得活检钳到达一定位置就会打开。收回过程中,将活检钳限制在圆孔中,活检钳逐渐闭合,从而实现组织的夹取,图1(d)为该机器人的CAD模型。北京航空航天大学的O. Tovmachenko等采用滑块曲柄机构,驱动三爪开合实现活检操作,其CAD模型如图1(e)所示[15]。
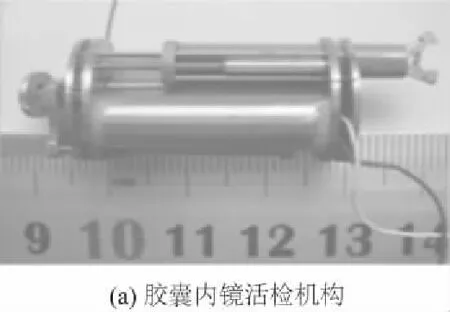
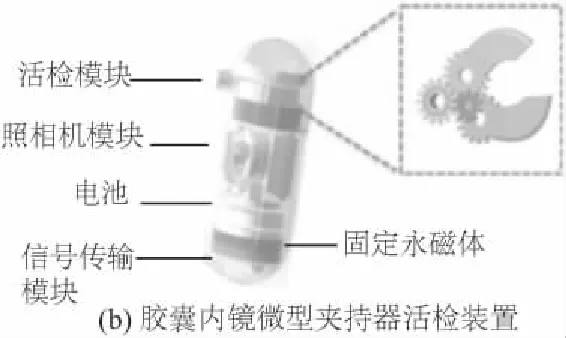


图1 活检钳机构
1.2 活检剃刀
胶囊机器人用活检剃刀机构的运行动作与日常生活中的剃刀动作类似。但由于胶囊机器人内部结构十分狭小,如何实现剃刀机构主动运动成为一个难点。
韩国国立全南大学的VIET Ha Le[16]针对胶囊机器人的活检问题提出了一种由电磁驱动的智能触发活检装置,它利用带有椭圆孔的活检装置紧贴组织,从而使装置中的剃刀剃下组织样本。图2(a)是活检装置的示意图,由椭圆孔、连接弹簧的活组织切片剃刀、带有微簧片开关的模块、聚合物弦和形状记忆合金(shape memory alloys, SMA)模块组成。装置首先被迫压在组织处,在椭圆孔处有部分组织被压紧嵌入到椭圆孔内部,在旋转磁场作用下机构被启动,当刀刃经过椭圆孔时,嵌入其内部的组织被刀刃剃下保存在贮存空间内。图2(b)所示是该团队提出的磁驱动剃刀式活检机构,该机构无需电池供能,由外部磁场驱动[17]。
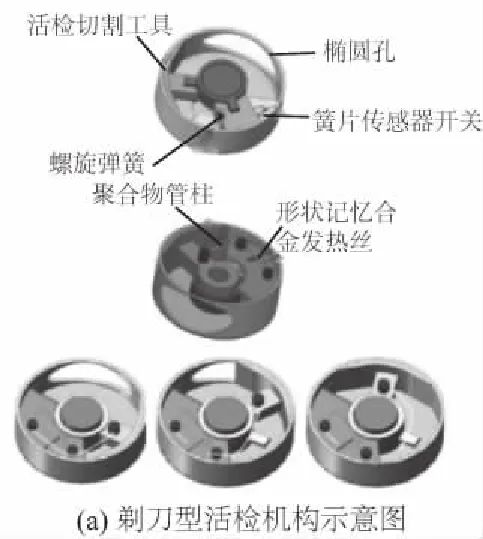
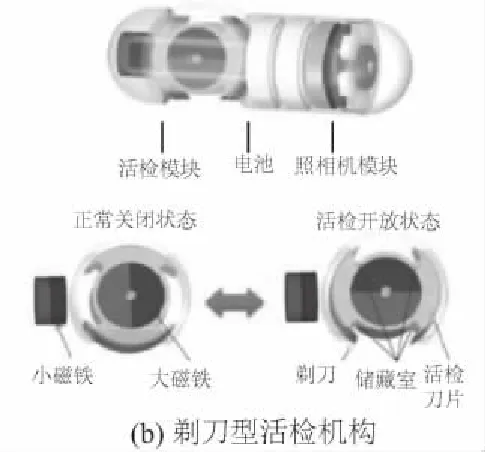
图2 活检剃刀机构
2 行进与锚定机构
早期的胶囊内镜无法在人体肠道内主动行走或驻留,只能随着肠道的蠕动而移动。为了更好地观察病灶位置、活检取样和定点施药,越来越多的科研工作者提出了具有主动行进机构及锚定机构的胶囊机器人。它不但解决了胶囊内镜在人体内无法移动的难题,还可以保证胶囊内镜以一定的速度和方向定向移动或停留,大大方便了医生对病情的诊断和研究。
2.1 行进机构
目前科研工作者所提出的行进机构多种多样,主要有:尺蠖类爬行、螺旋桨推动、旋转磁场驱动、蠕动前进及划桨式爬行等。尺蠖身体的前后部位有类似吸盘的附件,中间躯干可以收缩和伸长,运动过程中前后吸盘交替作用,中间部位交替收缩和伸长,最终实现运动。尺蠖类胶囊机器人包括箝位、伸缩等模块,在运动过程中模拟尺蠖的运动步序。该过程中箝位机构主要通过气动吸附、夹钳、径向扩张的方法增加机器人在肠道中的锚定力。
H Shu 等[18]提出了一种通过机械伸缩和锚定实现尺蠖式爬行功能的胶囊机器人。该结构通过伸缩模块和锚定模块实现了仿尺蠖爬行的步态。其伸缩模块主要依靠电机和丝杠传动实现。锚定模块则主要通过电机和齿轮传动实现,最终实现的机器人直径为14mm,长度为45mm,锚定最大直径32mm,轴向伸缩长度为9.5mm。实物如图3(a)所示。LUO Y等采用可展机构作为仿尺蠖机器人的伸缩和锚定装置,制作了机器人原理样机, 如图3(b)所示[19]。该装置适合各种崎岖的表面,是胶囊机器人行进机构的有益探索。
在液体环境中,最常见的运动执行器莫过于螺旋桨。螺旋桨驱动的胶囊机器人多为内部电池供电,电机带动螺旋桨驱动机器人前进。螺旋桨的作用主要用于控制胶囊前进的速度。徐建省等[20]设计的一种主动型无线胶囊机器人是由外部控制系统控制电机的运动方向及速度。胶囊机器人的头部为半球形透明罩,后面依次为LED 灯、磁块、摄像头、无线通信控制模块、电池、电机、螺旋桨。胶囊接收外部的电机控制指令,控制电机的启停及转动速度,电机带动螺旋桨旋转从而控制胶囊的运动速度。图3(c)为胶囊结构图,从该图中可以看出其为单螺旋桨胶囊,利用轮式驱动这种高效的前进方式。SUN Z等在胶囊机器人中采用磁驱动方式,让磁铁通过齿轮组带动蜗杆,从而带动作为驱动轮的4个蜗轮[21]。机器人三维模型如图3(d)所示,样机的行进速度为5.7mm/min。图3(e)所示是HEE Man Kim等仿照划桨,提出了划桨式主动运动胶囊机器人[22]。桨片前进时阻力小,后退时阻力大,利用此原理,胶囊得以前进。机器人只需单个驱动源就可以实现前进和驻留,结构简单,制作成本也较低。图3(f)所示是苏州大学的LI Juan等人提出的谐振式纤毛结构胶囊机器人[23]。机器人内部的压电层膜驱动配重块前后摆动,由于机器人外部的纤毛都指向后方,前进和后退的摩擦力不同,这样机器人就可以依靠惯性力前进。仿照蚯蚓等动物的蠕动,上海交通大学的WANG Kungdong等提出了蠕动式胶囊机器人[24]。机器人共有5节,前后模块依次按照顺序运动,就可以实现蠕动式前进与后退。如图3(g)所示,细长的机器人在结构和尺寸上来看十分适合在肠道中运动。
旋转磁场驱动指在旋转磁场作用下,利用动压原理使胶囊在肠道中高速螺旋前进。GAO Mingyuan等[25]设计了旋转磁场的驱动胶囊机器人并进行了相应的电磁驱动设计及仿真分析。叶波等[26]提出了一种新的基于单片机的手持式机构,用于主动控制磁性螺旋型胶囊机器人,该胶囊机器人在猪小肠内进行了离体运动实验。ZHANG Yongshun等[27]设计实现的磁驱胶囊机器人,可在管道中垂直运动,并研究了转弯的可行性。为了适应变化的肠道直径,设计了变直径胶囊,采用三轴正交的亥姆霍兹线圈生成了一个空间全方位的磁场环境,提高了胶囊机器人外表面螺旋肋处的流体动压力、推力和胶囊机器人的管径适应性。GUO S等人将胶囊机器人做成螺旋状,在机器人内部安装磁铁,利用外部磁场驱动机器人旋转,从而使得机器人前进[28]。如图3(h)所示,该机器人结构十分简单,很容易小型化。
韩国航空大学的KIM Ji Yoon等提出了一种自主调节的螺旋式胶囊机器人爬行机构[29],并在离体的猪小肠内做了相关实验,其结构如图3(i)所示。该结构包括胶囊主体,两个可旋转和滑动的磁环、螺旋叶片。两个磁环通过多个螺旋叶片相连。在外部磁场引导下,由磁场引导,胶囊机器人会跟随外部磁场前进而前进。当肠道内径前后一致时叶片两端的磁环与肠道摩擦力一致,不产生相对转动,胶囊只产生平移;当肠道内径前后有差异时叶片两端的磁环与肠道摩擦力不一致,磁环产生相对转动,叶片产生扭转,胶囊一边旋转一边平移,旋转运动有助于胶囊的平移前进。
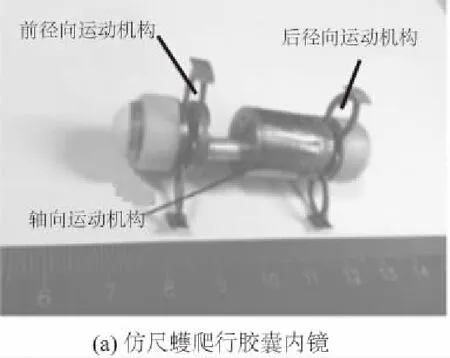




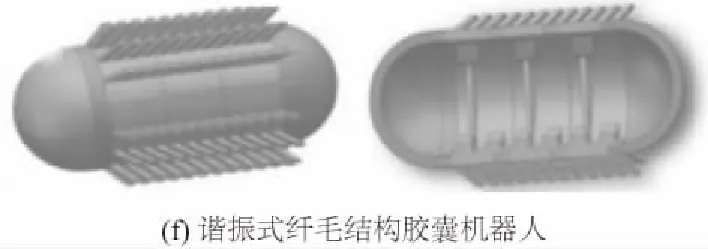


图3 行进机构
2.2 锚定机构
胶囊内镜在肠道中可以依靠肠道蠕动实现被动前进,从而对整个消化道进行检查,然而整个过程中,胶囊的运动是不可控的,这就经常导致难以获得病变区域的清晰图像。为此,胶囊机器人需要借助主动锚定机构,以实现在特定位置驻留,从而看清病变区域。
图4(a)所示是WOODS,S. P等提出的锚定装置,该装置采用电机驱动,通过齿轮组带动曲柄滑块机构,从而将滑块和连杆撑开实现锚定[30]。该胶囊机器人结构紧凑,锚定装置与肠壁接触区域较大,可有效锚定而不损伤肠壁。A Mousa等基于转动滑块机构提出一种结构十分紧凑的锚定机构[31]。如图4(b)所示,该机构使用微型电机同时驱动3个曲柄,从而带动3根摇杆撑开,但该装置机构锚定足与肠壁接触面积较小,安全性较低。
澳大利亚伍伦贡大学的ZHOU Hao等提出了一种基于同极相斥、异极相吸原理的腿式胶囊机器人锚定机构[32]。该胶囊机器人的锚定机构如图4(c)所示。胶囊机器人上有两个磁环,一个可旋转,一个可上下滑动。可滑动的磁环通过铰链与锚定腿相连。当撤除外部磁场时,由于异极相吸作用,滑动磁环靠近旋转磁环,锚定腿收紧;当施加外部磁场时,由于同极相斥作用,滑动磁环远离旋转磁环,锚定腿张开,达到锚定作用。图4(d)所示是该学者提出的另外一款带锚定机构的胶囊机器人[33]。该机构采用外部磁场驱动新颖的可展机构,该机构伸缩比高,与肠壁接触也较为温和。
如图4(e)所示,MA T等采用摆动滑块机构提出了一种胶囊机器人的锚定机构[34],该机构与文献[32]中的机构类似。不同的是,该机构采用电机驱动丝杠螺母机构带动滑块移动,易于控制。如图4(f)所示, ZHANG F等提出了使用凸轮机构带动锚定装置的方案,该方案采用外部磁场驱动胶囊机器人中的磁铁旋转,进而带动凸轮旋转[35]。另外,该装置中也采用凸轮机构带动活检钳伸出缩回,结构十分小巧紧凑。蒲鹏先等人设计了一组展开机构作为仿尺蠖胶囊机器人的锚定装置,该机构由电机驱动小齿轮,进而带动与3个大齿轮固连的弧形腿[36]。该结构伸缩比大,结构十分简单,与肠壁的接触也较为柔和。
浙江大学的G Daqiang等人提出了一种采用记忆合金的胶囊机器人爬行及锚定机构[37]。胶囊机器人的爬行装置核心部件是一个SMA弹簧,同时胶囊内镜的四周增加了6个SMA锚定腿,胶囊机器人的直径为15mm,总长度为33mm。该团队对该种胶囊机器人前进及后退时的步态进行了分析,同时通过对胶囊机器人在肠道内的受力进行了分析,通过力学分析对6个SMA锚定腿进行了优化设计。







图4 驻留机构
3 给药机构
主动运动胶囊机器人的另外一个重要作用就是给病变区域施药,这可以大大提高药物的利用率。图5(a)所示是S Yim等提出的具有给药功能的胶囊机器人。机器人结构由柔性材料制作而成,用柔性铰链作为转动关节[38]。通过外部磁场驱动机器人内安装在首尾的两个磁铁块相互吸引或排斥,从而让机器人本身变形,触发给药机构实现给药。同样基于磁驱动,F. Munoz等提出的一款胶囊机器人,使用外部磁场驱动机器人内部的磁铁旋转,带动曲柄滑块机构,从而带动活塞将药物挤出实现给药操作,其三维模型如图5(b)所示[39]。GUO J等利用磁铁的同性相斥、异性相吸原理,直接通过外部磁场驱动胶囊内部的两块磁铁吸引或排斥,从而触发给药机构闭合或打开,实现药物释放[40]。仿真图如图5(c)所示。
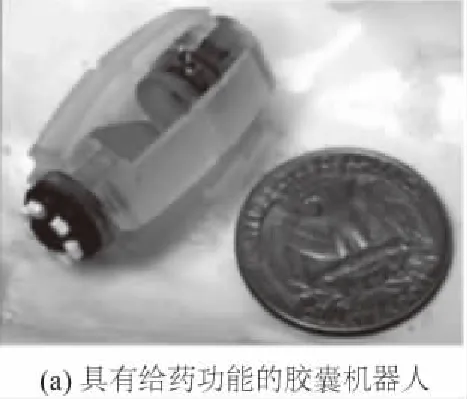

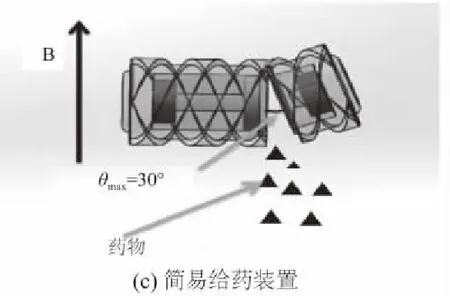
图5 给药机构
4 各类驱动-执行系统的特性分析
根据目前胶囊机器人各主动运动机构动力源的不同,可以将其归纳为电磁电机-机械传动机构、磁致动器-机械传动机构和智能材料致动器3种类型。
4.1 电磁电机-机械传动机构
采用电磁电机驱动的胶囊机器人,其机械传动机构多是通过齿轮系、丝杠螺母等机构连接在一起的。电磁电机-机械传动机构系统模型的建立与普通机械系统建模并无过多区别。通过计算各运动件的受力,得到系统各构件力、速度和加速度,进而建立机构的等效质量、转动惯量、阻尼等模型,最后得到系统的动力学模型,为控制模型的建立提供依据。由于胶囊机器人的空间狭小,因此其内部的机构均比较小而复杂。传递链越长,齿轮与齿轮之间、丝杠与螺母之间的累积间隙越大,系统的机械误差越大,最终导致系统的控制精度越低[41]。而为了提高传递精度,其做法只有提高零件的加工精度和改善系统的控制策略。提高零件加工精度会进一步增加微小零件的加工难度,同时增加成本;胶囊机器人在复杂的肠道环境内控制策略本身就比较复杂,还要改善控制策略用于消除机械传动的间隙会使得控制难度呈几何级数增加。
4.2 磁致动器-机械传动机构
磁致动器驱动的胶囊机器人利用磁场,基本上摒弃了电磁电机-机械传动机构中需要通过“链接”将能量传递给执行机构的中间传输装置,使得机器人结构更为紧凑,体积也更小。然而,磁致动器的一些局限性仍有待解决。磁场具有较大的滞后性、非线性和不确定性,建模难度较大,同时多自由度系统中需要多个磁体,如何克服磁体之间的相互作用也是疑难问题。此外作为微创诊疗设备,磁致动器限制了胶囊机器人在核磁共振成像(MRI)检查过程中的应用[42-43]。
4.3 智能材料致动器
SMA具有技术性能高,耐腐蚀,无磁性等特点[44],使其有望在生物医学上得到应用。目前,有两类控制模型能捕捉到SMA滞回特性,即利用微分方程来描述迟滞的差分模型和采用算子描述滞后的算子模型[45]。然而,应变小、驱动频率低、相变温度高和精确的控制难度等问题限制了SMA的使用范围。从安全角度考虑,温度和电流的隔离是患者使用的最低要求,同时加热和冷却的方法诱导相转变也会对系统响应产生较大影响。同时胶囊机器人无线驱动的特殊性决定了SMA不易实现加热或者冷却诱导相变。
5 结语
从目前的研究成果来看,各种带主动运动机构的胶囊机器人都处在研究阶段,均存在不同程度的缺点。外部磁场驱动是目前研究的主流方向,此方案可以在机器人内部使用小型的磁铁作为驱动源,设计较为灵活。混合驱动可能为主动运动胶囊机器人的发展带来突破,对各种驱动方式进行取长补短,有望研发出高性能、多功能的胶囊机器人。另外,简单巧妙的机械结构、微型高效的作动器、越来越集成化小型化的电子器件也会有力推动胶囊机器人的发展。
消化道检查机器人的市场在不断扩大,然而高效、安全、微型的主动机器人的设计制造是目前最大的挑战。尽管科研人员对胶囊机器人主动运动机构进行了大量的探索,但目前为止尚没有一款使用主动运动机构的胶囊机器人问世,但随着新兴技术的出现和制造水平的不断提高,更加集成化、智能化的胶囊机器人一定会成为现实。
