事件触发机制的网络控制系统控制器设计
2020-07-14王连耀王天宝
王连耀 王天宝


摘 要:为了节约控制系统能量与缓解通信网络压力,针对基于事件触发机制的网络控制系统控制器设计问题进行研究。首先,提出一个新颖的事件触发通信方案,并且考虑事件触发通信方案的作用,建立一个时滞控制系统模型;然后,利用李雅普诺夫稳定理论与线性矩阵不等式方法提出两个稳定定理;最后,根据提出的两个定理利用数值例子进行仿真,以验证方案的有效性。当设置触发阈值δ= 0.2,性能参数y=200时,仅由45.3%的采样信号触发通信,相较于时间控制方案,节约了有限的通信带宽。仿真结果表明,该控制方案不仅可以保证控制系统具有一定控制性能,还降低了控制系统通信频率,节约了控制系统能量。
关键词:事件触发机制;时滞系统;李雅普诺夫稳定理论;网络控制系统
DOI: 10. 11907/rjdk.191421
开放科学(资源服务)标识码(OSID):
中图分类号:TP319
文献标识码:A
文章编号:1672-7800( 2020)001-0130-05
0 引言
网络控制系统( Network Control Systems,NCSs)是一种新型控制结构,其通过通信网络联系控制回路,可以在系统组件(传感器、控制器和执行器)之间交换控制信号与反馈信号[1],使得控制系统更加智能与高效。将网络引入系统具有许多优点,但也不可避免地造成了一些不确定性问题,如网络延迟、数据包丢失与数据包无序等[2],这些网络诱导问题势必会影响系统性能,甚至导致系统不稳定。另外,由于通信带宽是有限的,大量需要通过网络传输的数据会对节点与有限的网络带宽造成负担[3]。所以,如何在保证控制系统性能的前提下尽可能节约能量并减少通信网络压力,是网络控制系统领域的一个重要研究课题[4]。
针对上述问题,学者们提出了许多控制策略,例如周期触发控制,该控制方案以固定时钟周期对设备进行采样,并将采样得到的数据全部发送到通信网络。这种周期性的采样数据控制一定程度上推动了网络控制系统发展[5]。然而,周期性的触发控制在实际控制系统中可能引发一系列问题,如造成不必要的资源浪费等[6]。近年来,事件触发控制策略引起了很多科研人员关注。在事件触发通信方案的实现中,信号由预先设计的事件触发条件决定是否触发通信,而不是像传统的周期性通信一样,按照计时器的时间间隔进行通信,因此可以减少数据传输次数,减轻通信网络负担。所以对于此类机制的研究具有一定的现实意义。
近年来,在已有研究文献中,呈现出了很多有价值的方案,如文献[7]提出一种考虑分组丢包与网络时延的分布式事件触发方案,证明了线性非时变网络控制系统的稳定性。针对网络诱导时延存在随机和不确定性的问题,文献[8]提出一个事件驱动的H∞控制器设计方案;文献[9]针对考虑时延与丢包的网络控制系统,提出一个事件驱动的H∞协同设计方案,该方案应用松弛矩阵变量对控制系统模型进行处理;文献[10]从事件触发通信模型角度出发,对事件触发控制方案进行改进,并对基于不同事件驱动通信的控制器和通信方案进行协同设计;文献[11]提出一种记忆状态反馈控制器与一种具有时滞不确定网络控制系统的事件触发控制方案。在触发通信方案中,当状态误差超过指定阈值时,传感器将采样数据传输到控制器,从而减少被传输的采样数据,以便在事件触发器下减轻网络负担。
受到以上文献研究的启发,本文研究基于事件触发通信机制的状态反馈网络控制系统的控制综合问题。相较于以上文献,本文考虑了时变的采样周期,在状态变化较小的时间段减少对设备的采样,从而节约能量,并且在设计的新颖的离散事件触发方案基础上,通过充分利用时滞建模方式,建立一个与当前采样时刻状态及上一次事件触发通信状态之间误差相关的状态误差依赖型时滞控制系统模型,因此相比文献[9]更容易在统一框架下同时考虑通信和控制问题;然后,利用Lyapunov稳定理论提出两个稳定定理,以评估具有时变采样周期和时变通信延迟的网络控制系统的H∞稳定性,并对控制器进行设计;最后利用两个数值的例子,验证本文方案的有效性。
1 问题描述及事件触发方案
1.1 设备与采样器
考虑一个线性时不变物理装置:
x(t)= Ax(t)+ Bu(t)+ Biw(t)
(1)
控制系統采用时变采样的方式,假设采样周期hs是变化的,在数据变化的高峰期缩短采样间隔,而在信号变化较小的时间段,可以减小采样频率,以节省能量、减少对设备的损害。
1.2 事件触发器
建立一个新型事件触发通信方案:
1.3 通信网络与零阶保持器
本文假定数据发送是通过单包的方式,并且假设数据包在通信网络中没有出现丢失与无序问题。
在控制回路中引入零阶保持器,当一个数据包通过通信网络到达零阶保持器时,会被立即发送到执行器,并且直到下一次有效数据包到达时,才会更新数据。
2 系统建模
本节建立一个状态误差依赖型时滞系统模型,该模型考虑了上节提出的离散事件触发通信方案,从而有利于后续在统一框架下进行H∞控制器的分析与综合。
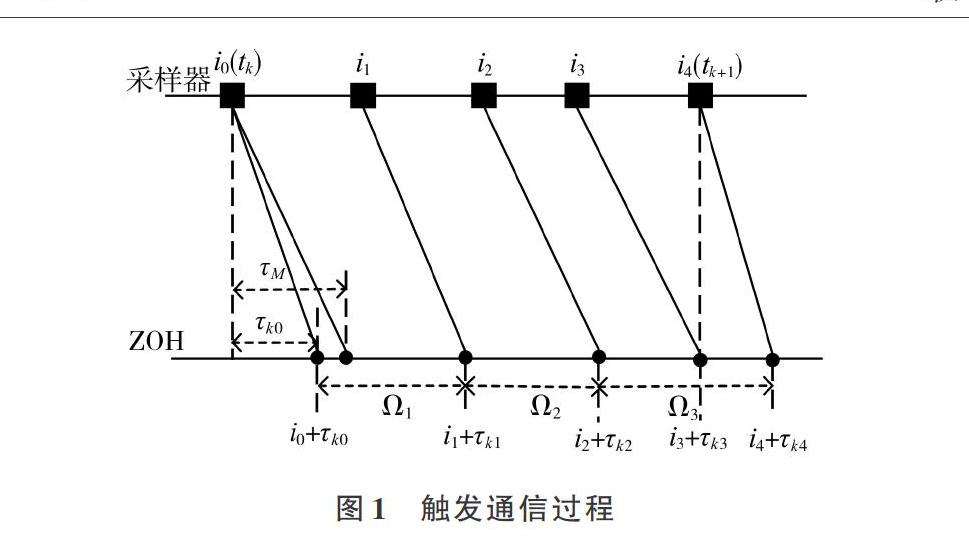
假设在tk时刻生成事件,数据包通过网络经过τk延迟后到达零阶保持器,t k+1次事件触发时,经过τk+1延迟到达零阶保持器。将零阶保持器的时间间隔Ω分为若干子集[9,13],如图1所示。
3 稳定性分析与控制器设计
3.1 稳定性分析
若系统进行时变采样、单通道传输,并且考虑数据通信过程中的非均匀分布延时,利用Lyapu-nov稳定性分析方法,可得到受通信方案式(2)约束的闭环系统式(6)是渐进稳定的,即得到如下定理:
5 结语
[15] 付敬奇 ,昊杰 ,沈卫利 .网络控制系统的事件触发与 Hw控制协同设计 [ J ] .系統仿真学报 . 2018 . 30( 9) : 3578-3585.
[16] 吴敏 ,何勇 .时 i~系统鲁棒控制 : ~由权矩阵方法 [ M] .北京 :科学出版社 , 2008.
[17]GHAOUI L, OUSTRY F, AITRAMI M. A cone complementarity lin- earization algorithm for static output-feedback and related problems[J]. IEEE Trans. Autom. Control, 1997 , 42( 8) : 1171-1176.
[18]PENC C, HAN Q L. Output-based event-triggered H _ control forsampled-data control systems with non-uniform sampling [ C l. Proc.of the American Control Conference . 2013.
[19]DONKERS M C F. HEEMELS W P M H. Output-based event-trig-gered control with guaranteed L= gain and improved and decen-tralised event-triggering [ J] . IEEE Trans. Autom. Control. 2012 , 57( 6) : 1362-1376.
[20]MAZO M . ANTA A, TABUADA P. An ISS self-triggered implemen-tation of linear controllers[J] . Automatica, 2010 , 46( 8 ) : 13 10-1314.
基金项目:国家自然科学基金青年科学基金项目( 61403170)
作者简介:王连耀(1994-),男,江苏大学电气信息工程学院硕士研究生,研究方向为事件触发机制的网络控制系统;王天宝(1982-),男,博士,江苏大学电气信息工程学院讲师、硕士生导师,研究方向为事件驱动网络控制系统的网络流量优化与控制综合、忆阻切换系统动态分析与非连续控制。本文通讯作者:王天宝。
