智能树木涂白机设计
2020-07-14周丽娜刘文庆刘峻伶
周丽娜 刘文庆 刘峻伶
摘要:本文以智能机器给树木涂白作业为研究目的,以组合涂刷运动系统、视觉识别系统、物料供电提示系统、智能轨道系统以及机械设备树木涂料给料控制系统的方式进行设计。智能树木涂白机可智能自动化进行树木涂白,智能控制涂白液的输出,涂刷自动进行树木涂白作业。本文通过阐述智能树木涂白机设计的思路,并进行实践,希望通过对智能树木涂白机的设计可减少人工工作压力,减少涂料的浪费。
关键词:智能;树木涂白机;设计
中图分类号:TB472 文献标识码:A
文章编码:1672-7053(2020)05-0155-02
1树木涂白机概述
树木涂白机是用于对树木进行涂白作业的机器,代替人工涂白,将人工涂树作业动作转移至辅助树木涂白机作业。树木涂白机可减少作业人员对于树木涂白液的接触次数以及减少作业人员的工作压力。
2树木涂白机现状
现存的树木涂白设备,大多设备体型过大,对于较为茂密的树林以及车水马龙的街道来说无法进入,并且单人操作不便,需2至3人一同操作使用机械设备,且需要一定的操作技术。虽亦有一些较为小型的机械设备,但其装置内部结构亦过于繁杂,使得其体积对于单人操作也过于偏大,操作不便。同时现存大型设备涂白过程中,设备喷涂出的涂液量不易控制,会造成资源浪费以及污染环境。
3智能树木涂白机设计思路
3.1功能设计
1)“边喷液边涂刷”功能。智能树木涂白机涂树过程体现自动涂树以及控制物料,将喷液处与刷头进行组合使用,减少人为“蘸取涂料”这一多余动作。
2)控制物料输出功能。智能树木涂白机通过树木涂料给料控制系统地计算,控制涂白液的输出。
3)智能提醒功能。当智能树木涂白机监测到涂剂及电量余量不足时,可由传感器实时监测盛装涂料容器内涂剂的余量以及电池所剩电量,智能树木刷白机可发出颜色及声音警告提示作业人员及时为其补充。
4)识别树木功能。智能树木涂白机在使用过程中,树木涂白机的识别系统会进行树木识别,进而确定树木位置进行作业。
3.2结构设计
智能树木涂白机的整體结构主要由控制系统、视觉识别、涂白液放置区、供能系统、物料输出,移动装置六部分构成。
1)控制系统。控制系统可由系统编码设计而形成,装置上可设计人机交互操作触摸屏,人通过屏幕可以与控制系统进行联系,从而控制液体流量、树木涂白高度、路线设计以及机器工作终止等。
2)视觉识别系统。可用于辅助其他系统工作的完成,例如,识别树木,从而进行树木定位,进而完成树木涂白的作业;当涂剂及电量余量不足时,视觉识别系统会产生颜色以及声音提醒作业人员。
3)涂白液放置区。机体内可合有涂液特定盛装容器,即涂白液放置区,涂白液放置区安装有SY-UQZ型磁浮球液位计,用于检测装料桶内涂白剂液面的高度。采取顶置安装的方式,通过法兰安装于涂白剂装料桶顶上,当磁浮球随液位变化、沿导管而上下浮动时,由于磁性作用,浮球液位计的干簧受磁性吸合,把液面位置变化成电流信号输出到触摸屏上,同时触摸屏上设定液面上、下限报警,通过视觉系统可见的颜色改变来增加或减少物料。
4)供能系统。其是由太阳能电池板、太阳能控制器、蓄电池构成的太阳能光伏发电系统组成。蓄电池可使用可替换蓄电池,防止在长期作业中断电而导致工作无法继续进行。采用太阳能发电符合绿色发展理念,节能环保,也使作业变得灵活方便。
5)物料输出。物料输出部分设计成输出胶管及刷头电的组合形式,刷头为本机的喷涂装置,采用刷头与输液管相组合的方式,边喷液边涂刷。刷头可设置为两个,皆置于圆形轨道上,涂树作业时,两个刷头沿着圆形轨迹进行涂树,由控制系统控制,轨道与刷头向下移动再次重复动作,提高涂树作业的工作效率。
6)移动装置。移动装置的设计采用履带结构,履带适用范围广,适宜树木涂白机在各个场合移动使用,避免泥泞而使得树木涂白机无法作业。
3.3系统设计
树木涂白机器是由机械设备树木涂料给料系统来操作控制,机械设备树木涂料给料系统由机械设备涂刷运动系统、视觉识别系统、物料供电提示系统、智能轨道运动系统组成。
1)视觉识别系统。视觉识别系统可以基于获取深度信息的传感器Kinect实现对于环境内的树木深度感知其信息,帮助机器分析树木位置、胸径大小及表面粗糙程度等,识别出信息后将指令传递给控制系统。在粉刷树木过程中视觉识别系统可以实时监测工作完成度及完成质量,通过树与涂料的色差进行识别涂树完成度,再次将信息传递给控制系统。
2)机械设备涂刷运动系统。控制系统在接受到识别系统发出的信息后,可根据识别的信息(树木的半径)以及人为输入的涂树高度自动计算出所要输出物料的多少,将涂料准备好后运动系统开始粉刷工作。根据所识别到的信息对树木进行刷头沿圆形轨道运动,同时刷头与圆形轨道进行向下运动来模拟作业人员粉刷动作。人工可以通过交互屏幕控制迷你PLC,迷你PLC所带的电机模块控制电机正反转进行往复运动,通过转速调节速度,在进行往复处加入限位开关,当接收到启动命令时电机正转触点闭合,轨道进行向上运动,到达限位开关时,轨道进行向下运动再次到达限位开关,通过梯形图设计逻辑关系,进行模块化轨道的上下运动。
3)智能轨道运动系统。刷头置于轨道上,特质刷头的下方与轨道内侧具有磁l生,在通电情况下,两者相互作用,从而使特质刷头在轨道进行运动。轨道由数个弯形轨道组合而成,可以人为进行拼接拆卸,根据树的粗细不同,设计出五种半径不同的轨道方式,尺寸设计分别是半径为6厘米、12厘米、18厘米、25厘米、30厘米的轨道,轨道内侧合有磁性液体倾角传感器,磁性液体兼具磁性和流动性两大物理特性,基于这两个独特的物理性质产生了磁性液体倾角传感器。利用惯性质量块的微小位移带来的线圈电感变化,进行倾斜角度测量,便于更正运动轨迹。
4)人机交互系统。此系统需要人为协助进行工作,例如,人为在交互屏幕输入涂树高度进而输出物料,以及非正常情况下暂停或开始作业以及行走路线等。
4智能树木涂白机设计实践
根据设计思路对机械设备树木涂料给料系统、智能轨道运动系统进行设计实践。
1)涂料的输出。智能涂白机搭载机械设备树木涂料给料控制系统,系统进行自动识别判断所要粉刷树木对象的粗细及表面粗糙程度进而输出定量的涂白液,自动给料系统采用性能可靠的PLC和PROFIBUS现场总线技术。涂料给到电子秤进行计量,从而准确输出物料量。以防止多余涂料造成的浪费,同时也减少了对环境的污染程度。
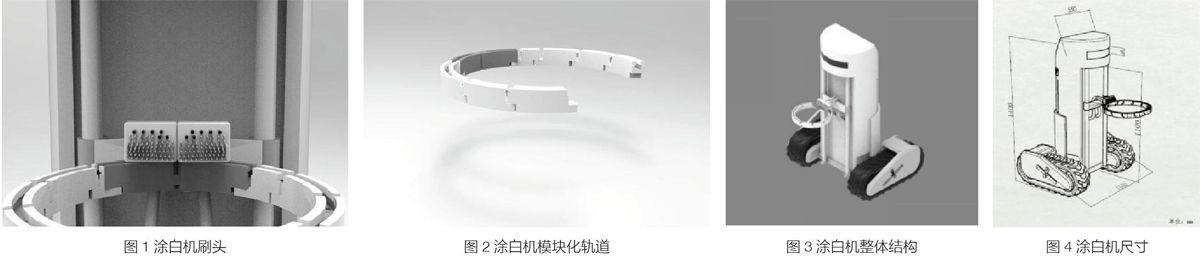
2)树木的粉刷方式。圆形轨道绕在树木周围,两个刷头可沿着圆形轨道进行涂刷,两个刷头运动方向相反,当两个刷头相遇时,树木的一层涂树工作完成,刷頭如图1所示。刷头与轨道进行向下运动来配合来完成第二层的涂树运动,重复以上工作,粉刷树木的工作即可完成。输出物料装置与刷头相结合,实现边喷液边涂刷的动作。根据树木粗细的不同,人为采用不同直径的圆形轨道进行粉刷。圆形轨道(图2)为模块化设计,通过树的直径来采取模块数量,人工拼接圆形轨道,由于刷子的刷毛部分长度为5厘米,即轨道直径误差范围在2厘米至6厘米之间。视觉系统可识别树木涂刷是否完全,即树木的各个缝隙都能够填充均匀,保证一定的工作质量。
机体外部可设计为一个半圆柱体的外壳保护支撑,前方为可上下运动的圆形轨道及刷头,此刷头与输液管连接,实现边涂边刷;涂白机整体结构如图3所示;涂白机机体尺寸如图4所示,高度为1400毫米,整机宽度设为为1100毫米,符合人机工程学尺寸,利于操作机器,识别处宽度设为为60毫米,视野宽大。
智能树木涂白机作业前期,人工进行轨道的选取安装以及涂料的增添,人为开启机器,机器视觉系统识别树木,识别后进行涂刷作业。
5结语
随着现代科技的不断进步,智能化操作方式的趋势已势不可挡,城市的不断发展使道路两旁的景观树木不断增多,智能涂白设备下在此背景也应运而生。机器代替人工的使用大大增加了工作效率且工作完成质量也有所提升。绿色环保是当今发展的重点,此树木涂白机的设计符合当下发展理念,既节省了人力物力财力,相比传统涂白方式又减少了对环境的污染。
