无人靶机掠海飞行擦浪缓冲动力学与俯仰控制
2020-07-14葛东东魏小辉
葛东东,聂 宏,2,魏小辉,2
(1.南京航空航天大学飞行器先进设计技术国防重点学科实验室,江苏 南京 210016)(2.南京航空航天大学机械结构力学及控制国家重点实验室,江苏 南京 210016)
无人靶机是无人机家族中的一个重要分支,主要用途是模拟作战飞机、导弹等对目标进行攻击的过程,为防空武器系统的试验和训练提供逼真的空中靶标,是防空武器系统研制、实验、鉴定以及训练中不可缺少的重要保障性器材[1]。掠海飞行可以大大增加隐蔽性。与此同时,带来的问题却是无人靶机可能会在掠海飞行的过程中与海平面接触[2]。由于靶机存在竖直方向的分速度,触水碰撞将产生巨大的过载,有可能导致靶机损坏。而通过在无人靶机机体下部加装一套缓冲机构,就有可能允许无人靶机在掠海飞行过程中出现擦浪。冲浪板在触水后,通过主副摇臂将载荷向上传递,从而压缩缓冲器。缓冲器的主要功能是油液流经小孔后,油液阻尼力使油液升温,而吸收碰撞所产生的能量,从而降低传递到无人靶机机身上的载荷。因此提高掠海型无人靶机的超低空飞行能力尤为关键[3]。
1 擦浪缓冲机构设计
设计缓冲机构的目的是将作用于无人靶机机身上的垂向加速度减小到某一设计值以下。为了防止擦浪过程中溅起的海水浸湿机身,损坏相关的电气设备,冲浪板的高度应当受到限制。综上考虑,无人靶机擦浪缓冲机构的设计[4]要求如下:
1)合理设计缓冲器,使缓冲器具有较好的缓冲性能,能够将作用于无人靶机机身上的垂向加速度减小到某一设计值以下,规定垂向过载小于50g;
2)合理布置机构的垂向位置,保证在缓冲过程中,缓冲器压缩量最大时,冲浪板下后缘与无人靶机机体下沿的距离不小于200 mm,即整个缓冲过程中,冲浪板应始终位于上边界安全位置以下;
3)考虑到高速飞行过程中,打开冲浪板会产生很大的气动阻力,在无人机飞行任务前段,应当保证冲浪板为关闭状态,即冲浪板应当与无人靶机外形共形。
本文以中国航天科工集团第三研究院研制的WJ-500中型高速无人机为背景[5],设计一套缓冲机构,带有擦浪缓冲机构的无人靶机如图1所示。
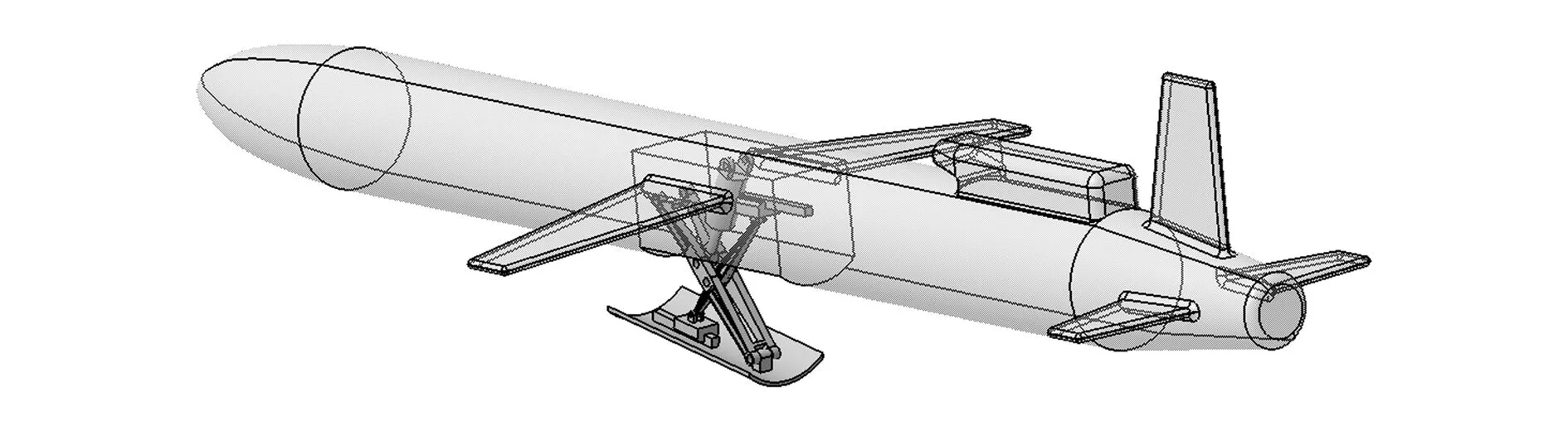
图1 无人靶机整体视图
将无人靶机整体考虑为两质量模型,分为上部弹性支撑质量(即机体质量)和下部非弹性支撑质量。先对机身整体进行受力分析,机体受到的外载荷主要包括水动力、重力、升力、发动机推力以及气动阻力[6],受力分析如图2所示。
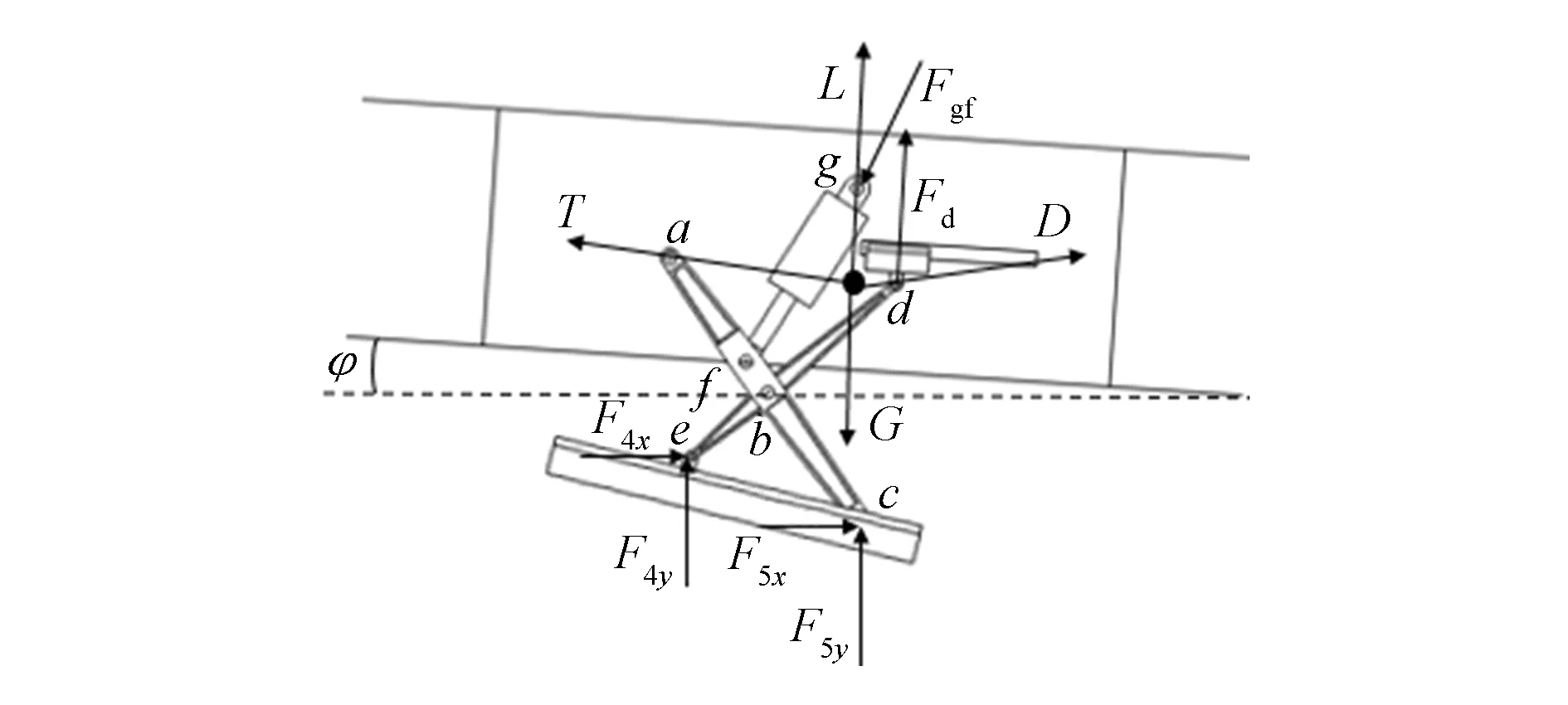
图2 受力分析图
机身总体在水平方向的动力学方程为:
(1)
机身总体在竖直方向上的动力学方程:
(2)
机体关于俯仰角的动量矩平衡方程:
(3)
式中:m1,m2为上部弹性质量及下部非弹性质量;x,y分别为机体在水平和竖直方向上的位移;xp,yp分别为下部质量在水平和竖直方向上的位移;I为机体绕质心的转动惯量;φ为机体坐标系与地面坐标系夹角;φ为气流坐标系与地面坐标系夹角;F4x,F4y,F5x,F5y分别为作用在冲浪板上的等效力在水平和竖直方向上的分量;L4x,L4y,L5x,L5y分别为对应等效力对机身重心处的力臂长度;D为阻力;L为升力;T为推力;ma为靶机总质量;g为重力加速度。图中,Fd为副摇臂在上安装点处受到的力,方向始终与F4yz保持一致。对于副摇臂,在机体坐标系下,分析其受力情况,并选取主摇臂绕图中点b的转动角度为系统自由度,顺时针为正,列出动量矩平衡方程:

(4)
式中:I副为副摇臂相对于质心的转动惯量;β为副摇臂转角;F4xz,F4yz为作用在下滑板两点处的载荷在机体坐标系上的投影;Lbe为主副摇臂连接轴线到副摇臂与冲浪板连接轴的距离;Lbd为主副摇臂连接轴线到副摇臂与靶机机体连接轴的距离。
Fd的大小为:

(5)
在机体坐标系下,分析缓冲系统受力情况,并选取主摇臂绕主摇臂安装点a点的转动角度为系统自由度,顺时针为正,列出动量矩平衡方程:
(6)
式中:I1为下部质量对主摇臂安装点的转动惯量;α为主摇臂转动角度;ex和ey分别为e点在机体坐标系下的横坐标和纵坐标;cx和cy为c点在机体坐标系下的横坐标和纵坐标;Fgf为缓冲器轴向力;γ为主摇臂与缓冲器轴线夹角;Laf为主摇臂-靶机机体安装轴线与主摇臂-缓冲器安装轴线之间的距离;Lab为主摇臂-靶机机体安装轴线与主摇臂-副摇臂安装轴线之间的距离;F4xz,F4yz分别为等效在e点的水动力在靶机机体坐标系x,y方向上的分量;F5xz,F5yz分别为等效在c点的水动力在靶机机体坐标系x,y方向上的分量。在机体发生俯仰运动时,水动力对下部质量的作用力大小及方向发生变化,故将全局坐标系下的水动力投影到机体坐标系下进行计算,计算公式为:
(7)
2 建立仿真模型
数值仿真采用MATLAB/Simulink软件,将上述计算公式编辑成计算函数,利用Simulink的积分环节,对常微分方程进行数值求解,形成计算回路。采用定步长迭代进行计算,步长设置为0.000 1 s,算法采用三阶龙格-库塔算法。
仿真初始输入参数见表1。
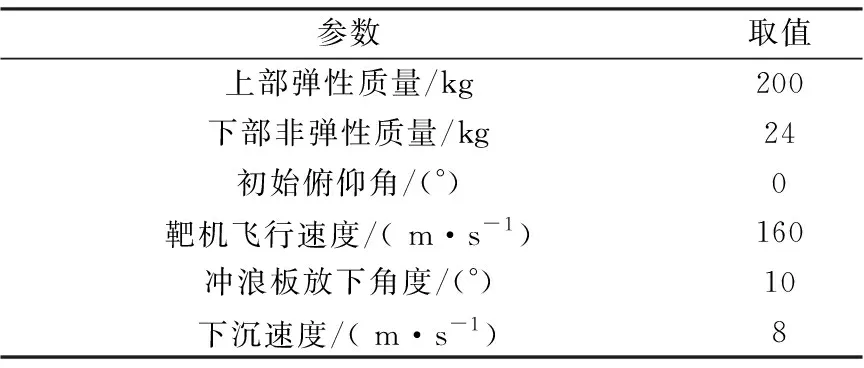
表1 仿真输入参数
LMS Virtual.lab仿真软件已被广泛应用于航空、航天、汽车和机械工程等领域,它不仅能为多学科设计分析团队提供完备的工具,还具有设计流程自动捕捉和管理功能,并完全实现参数驱动[7]。
3 仿真结果对比分析
缓冲系统设计要求中提出:在缓冲结束后,靶机机体上的过载应减小到50g以下。通过两种仿真方法,得到在下沉速度为8.37 m/s情况下,无人靶机机体y方向的加速度,结果对比如图3所示。
由图3可以看出:第一个峰值处,MATLAB仿真结果略大于LMS仿真结果;第二个峰值处,MATLAB仿真结果略小于LMS仿真结果。MATLAB第一个峰值为368 m/s2,LMS第一个峰值为353 m/s2,以LMS仿真结果为基准,相对误差为4.25%;MATLAB第二个峰值为422 m/s2,LMS第二个峰值为468 m/s2,以LMS仿真结果为基准,相对误差为-9.83%。
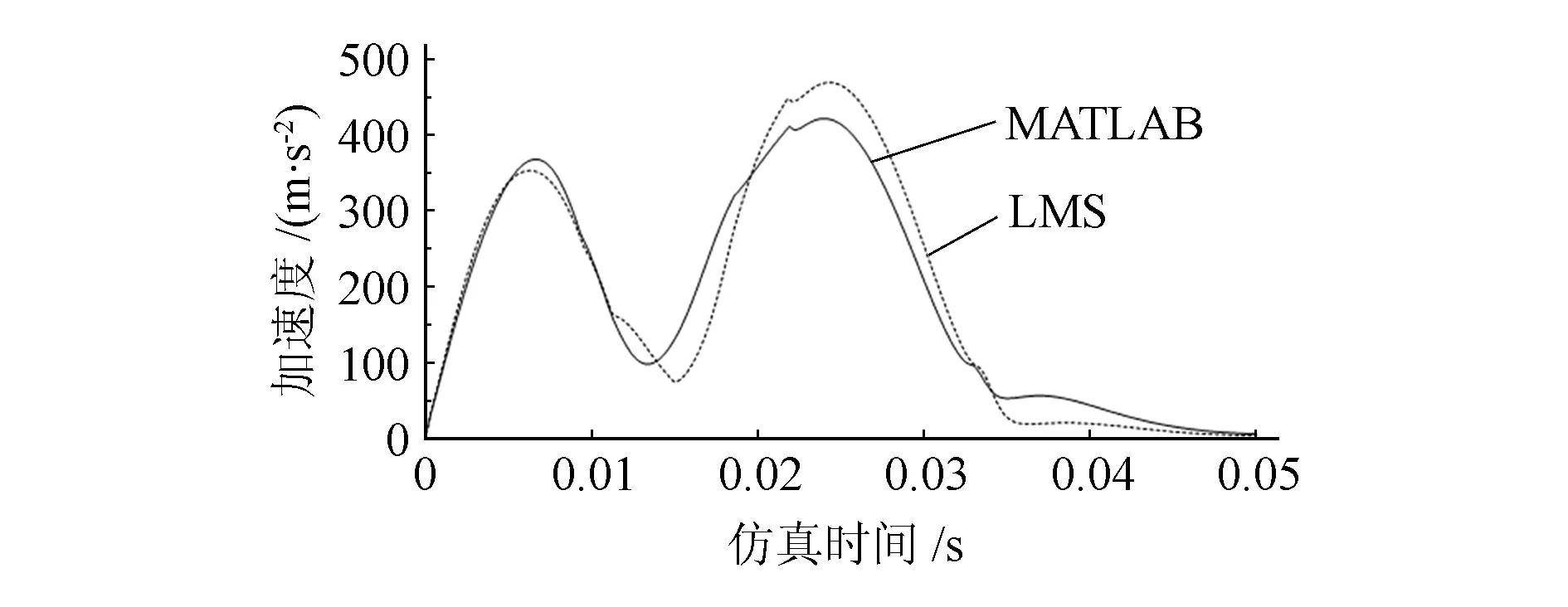
图3 机体y向加速度
设计要求中还提出,在缓冲过程中,应保证缓冲器压缩量最大时,冲浪板下后缘点与无人靶机机体下沿间的距离不小于200 mm,该距离参数仿真结果如图4所示。

图4 冲浪板下后缘点与无人靶机下沿间距离
从图4可以看出,两种仿真方法得到的计算结果整体吻合度良好,且冲浪板下后缘点与弹体下缘间距离最小值均大于200 mm,满足设计要求[8]。
4 擦浪缓冲后无人靶机俯仰姿态控制
升降舵在无人靶机飞行姿态控制中起着至关重要的作用,无人靶机在空中飞行的过程中,通过控制指令,使升降舵的舵面发生偏转,相应地会产生附加的气动力和附加气动力产生的气动力矩,从而改变舵面偏角,实现对无人靶机俯仰运动的控制[9]。当本文所研究的擦浪缓冲系统触水缓冲后,将对无人靶机的姿态产生很大的扰动,如果不加以控制,靶机机体可能触水,严重时可能造成无人靶机姿态的颠覆或者设备的损坏,因此需要对触水缓冲后的姿态加以控制。当无人靶机抬头时,升降舵向上偏转,产生的附加低头力矩使得无人靶机低头,升降舵纠偏原理如图5所示。
在进行靶机俯仰姿态控制时,选择双模态控制方法中的比例微分(PD)控制,比例环节对系统输入与实际输出之间的偏差进行比例放大与调节,微分环节反映偏差信号的变化趋势,并能够在偏差信号变得太大之前,及时在系统中引入一个有效的早期修正信号,从而加快系统的动态响应,减少调节时间。因此,升降舵纠偏控制系统舵面偏转指令可以表示为:
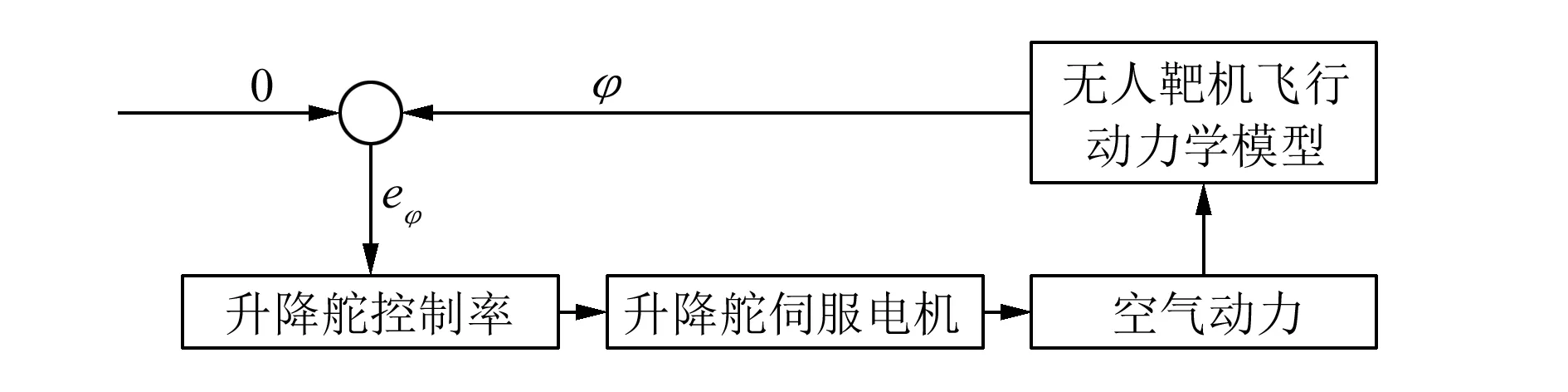
图5 升降舵俯仰姿态控制原理图
(8)
式中:δr为舵面偏转角;Kp,Kd分别为控制系统中对俯仰角控制的比例系数和微分系数。
在MATLAB/Simulink中建立升降舵纠偏控制模型,如图6所示。
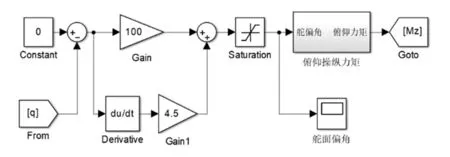
图6 升降舵纠偏控制模型
由图4可知,整个缓冲过程中,在缓冲系统压缩最严峻(就是压缩量最大)的情况下,冲浪板下后缘点距离无人靶机机体下缘仍有200 mm的距离,本文根据此参数确定靶机机体俯仰角的允许范围。通过计算,为保证靶机机头、机尾不发生触水情况,应保持无人靶机机体俯仰角绝对值不大于5°,并且认为当俯仰角度大于10°时,已经出现姿态的颠覆,对颠覆后的俯仰角度将不作分析。
从图7可以看出,由于受到水面载荷的作用,无人靶机擦浪缓冲机构触水之后,水动力使无人靶机抬头,俯仰角迅速增大,在0.2 s之后达到10°,很可能发生无人靶机尾部触水的情况,造成无人靶机的损坏。通过对俯仰操纵力矩的控制,将最大的俯仰角控制在5°以内,在大约1.0 s后,无人靶机的俯仰角稳定在0°。
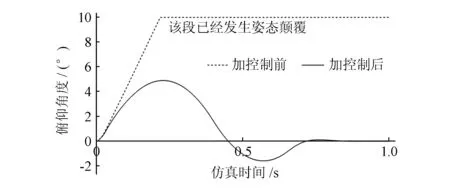
图7 擦浪缓冲过程俯仰角度变化曲线
从图8可以看出触水之后角速度迅速增大,中间有一段转折,是由于冲浪板有一段时间浸水深度减小为0,此时没有水动力的作用,缓冲结束后角速度最大,达到了48.7 (°)/s,俯仰角将进一步增大。施加控制环节后,最大角速度为40.1 (°)/s,在大约1.0 s后,无人靶机的俯仰角速度减小到0。
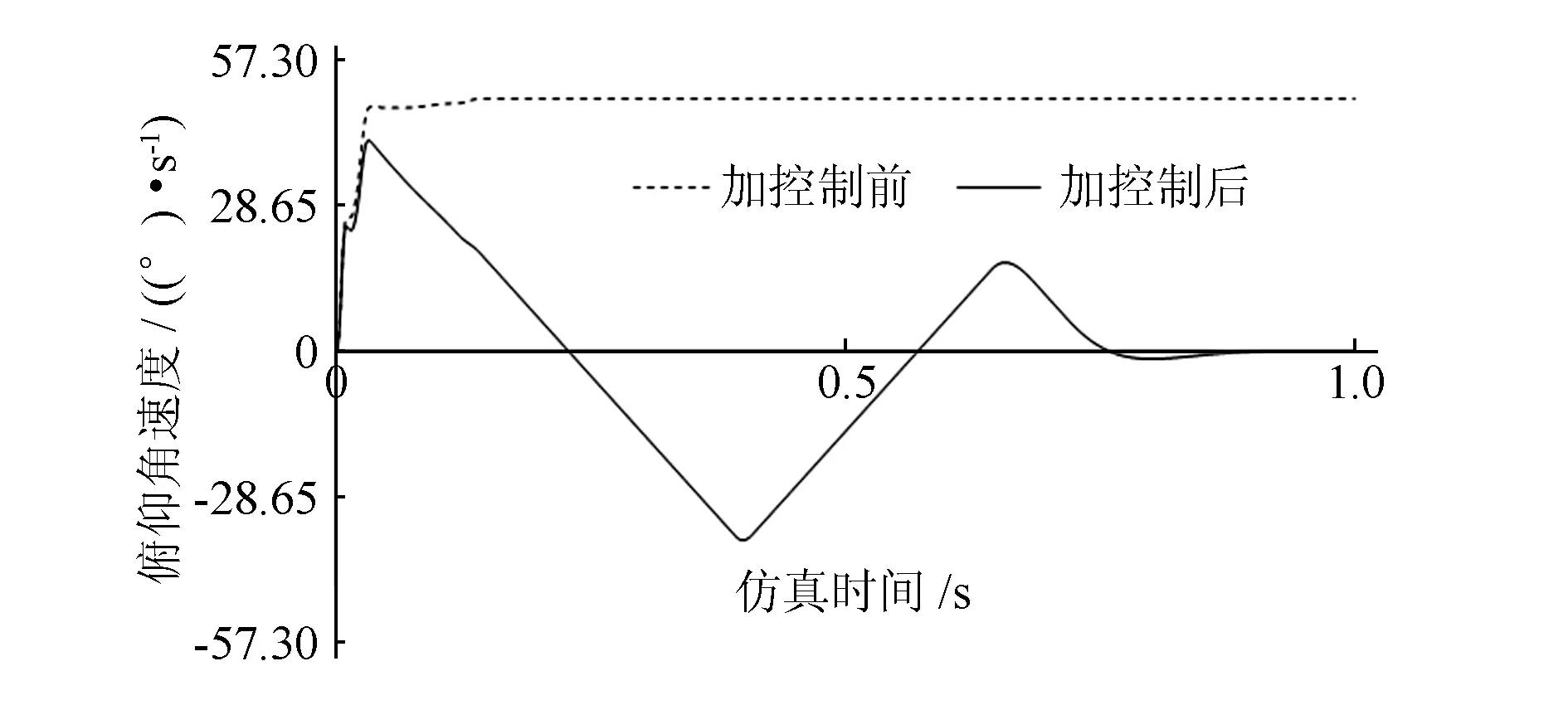
图8 擦浪缓冲过程俯仰角速度变化曲线
由于靶机以高速飞行,来流有着较大的动压,因此平尾上的力也比较大,有着较高的控制效率,能够有效地对无人靶机飞行姿态进行控制。通过以上分析可知,施加俯仰操纵力矩后,对擦浪缓冲后无人靶机的飞行姿态实现了有效控制。
5 结论
本文设计了一套用于掠海型无人靶机擦浪降载的缓冲系统,基于多体动力学理论,建立了动力学方程,采用MATLAB/Simulink模块搭建仿真模型,通过LMS Virtual.lab motion仿真验证计算结果,并针对擦浪后无人靶机俯仰姿态进行控制,得到如下结论:
1)该擦浪缓冲机构能够有效降低掠海型无人靶机出现擦浪情况下机身承受的过载,提高无人靶机的低空飞行能力。仿真结果显示,在给定的输入条件下,机体过载均小于50g。
2)整个缓冲过程中,冲浪板下后缘点距离无人靶机机体下沿距离始终大于200 mm,有效避免了因俯仰姿态角变化造成无人靶机尾部触水的情况,从而避免损坏靶机相关设备。
3)掠海型无人靶机擦浪缓冲后,将有很大的俯仰角速度,俯仰角度一直增大,在0.2 s时达到了10°;通过控制模块,有效地将无人靶机机体俯仰角度控制在5°以内。