适用于地面和探空观测的多路温湿度巡检仪设计
2020-07-13茆文杰刘清惓吕鸣晨
茆文杰,刘清惓,孙 星,吕鸣晨
(1.南京信息工程大学电子与信息工程学院,江苏南京 210044;2.南京信息工程大学大气环境与装备技术协同创新中心,江苏南京 210044;3.江苏省气象探测与信息处理重点实验室,江苏南京 210044)
0 引言
大气的温度、湿度等参数是了解和分析天气预报和气象变化极其重要的依据,也是气候诊断预测、气候变化预估等进行科学研究必不可少的资料[1]。探空仪是采集大气中温度、湿度等参数的重要仪器。根据国际气象组织对高空气象探测的有关规定,探空仪在出厂前以及施放前要进行精度检验,以确定探空仪传感器的基点是否在允许范围内。所以需要用一个可靠的检验设备来测量传感器的技术指标。近年来,已有不少国内外学者就如何对探空传感器进行精度检验展开研究,其主要的方法是使用基测箱。然而基测箱每次只能检验一个探空传感器,对于施放探空仪量较大的气象站和探空仪厂家需要一种可检验多个探空传感器的温湿度环境试验箱。目前市面上没有针对探空传感器精度检验的温湿度环境试验箱,由于箱内部会存在一定的不均匀性,可能会影响探空仪传感器的精度检验。
为了测试温湿度环境试验箱能否达到检验探空传感器的标准。本文提出了一种针对于地面和探空观测的多路温湿度巡检仪系统和校验温湿度环境试验设备的一套算法。校验过程中需将探空仪放入温湿度环境试验箱内,由于环境试验箱内温度场存在分布误差会影响湿度传感器采集的相对湿度值。为消除温度造成的影响,湿度参数应以绝对湿度或露点作为参考,而非相对湿度。本文使用PSO优化后的BP神经网络算法拟合出环境试验设备内温度和绝对湿度场的分布场来校验探空传感器的参数指标是否合格。
1 多路温湿度巡检仪系统设计
多路巡检仪系统是基于ARM的Cortex-M3架构的STM32F103处理器,主要有24路信号采集通道(9路湿度传感器和15路四线制PT100),RS485通信接口,24位∑-Δ模/数转换器AD7794,7英寸彩色液晶显示屏以及电源模块。有U盘拷贝数据(Excel格式或.NHD格式)和电池供电等功能。整个系统的结构设计框图如图1所示。
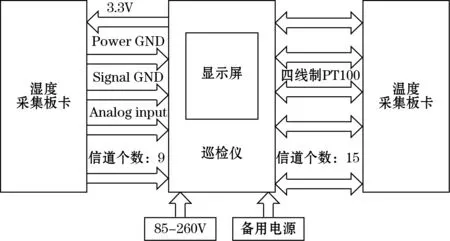
图1 系统框图
1.1 多路温湿度巡检仪电路设计
由于铂电阻具有精度高、性能可靠、抗氧化性好、物理化学性能稳定、有较高的电阻率等特点,所以本设计采用了铂电阻作为温度传感器[2]。湿度传感器选取的是HC2-C04,HC2系列是基于AirChip3000技术的数字湿度探头。HC2探头包含了HygroClip独特技术的所有优势,具有热交换功能的探头以及有显著改善区域测量精度和功能的特点。同时HC2作为标准的独立设备,可作为模拟量输出信号或者应用数字接口。
巡检仪共有15个温度测量通道和9个湿度测量通道。使用四线制电桥法测温,不仅可以消除连接线阻值的影响,还可以消除连接导线间接触电阻及其阻值变化的影响。采用高精度24位∑-Δ模/数转换器AD7794对温湿度信号进行采集,为了保证信号的转换速率,同时要尽量降低RMS。本文选择增益为1,更新速率为8.33 Hz,此时的RMS为1.04 μV。但由于AD7794只具备6通道测量功能,不能满足24通道测量的需求[3]。故选用单路十六选一,双路八选一的开关选择器ADG706,作为ADC的输入通道选择器。传感器通过开关选择器后连接到ADC的差分通道上。由于ADC采集到的是模拟信号,所以要将此模拟信号转换为数字信号来处理。它的基准电压会直接影响AD7794的转换精度。因此一个精准可靠的基准电压对A/D转换是非常重要的。本文使用ADR444ARZ芯片为ADC提供一个4.096 V的基准电源[4]。此电路的硬件结构框图如图2所示。

图2 传感器系统框图
本系统采集的是微弱信号,对噪声的处理尤为重要。传感器噪声的主要来源是来自系统内外的干扰。它的耦合方式有辐射耦合、直接耦合、电容耦合与电磁耦合等。本文在采用了电路布置时避免形成环路;回路设计时采用平衡方式;将数字和模拟电路的供电和接地分开布置;在供电的引脚放置LC滤波电路;在电路板外加一层金属屏蔽壳等措施来抑制噪声。
1.2 温度、相对湿度和绝对湿度的换算关系
现行的我国《地面气象观测规范》采用的是戈夫-格雷奇(Goff-Gratch)公式来计算空气中的饱和水汽压[5]。也是世界气象组织推荐使用的一种计算方式。本文将其作为参考公式。
在纯水的平面表面,0~100 ℃范围内的饱和水汽压公式如下:
(1)
式中:T1=273.16 ℃(水三相点温度);T=273.15+t(℃)(绝对温度);E为纯水平面饱和水汽压,hPa。
纯冰的平面表面,-100~0℃范围的饱和水汽压公式如下:
(2)
式中:T1=273.16(水三相点温度);T=273.15+t(℃)(绝对温度);E为纯水平面饱和水汽压,hPa。
一定环境温度下,相对湿度RH是空气中的待测空气中的实际水汽压强e与该温度下的饱和水汽压强E的比值:
(3)
绝对湿度ρω也可用水的蒸气压来表示:
(4)
式中:e为水汽的实际压强;m为在空气中溶解的水的质量;V为空气的体积;Rw为水蒸气的气体常数,462 J/(kg·K)=462 N·m/(kg·K)(1 J=1 N·m)。
系统首先通过温度传感器测量出当前环境的温度t,可由式(1)得到饱和水汽压E。然后读取湿度传感器采集值(相对湿度),可由式(3)求出当前水汽压强e。最后将e带入式(4)可计算出相应的绝对湿度ρω。
1.3 UI界面设计
此系统设计要将测量到的各通道温度、湿度信息在7英寸的LCD屏上实时显示出来。不但可以显示数据,还可以直观观测出数据波形,同时还可以保存成时间对应点数据文件,方便后续数据调用。UI界面如图3所示。

图3 UI界面图
2 BP神经网络和粒子群算法拟合
神经网络算法是一种当前使用非常广泛的算法,它的本质是由很多个小的非线性函数组成的大的非线性函数,反映的是输入变量到输出变量之间所存在的一种复杂的映射关系[6]。其中BP(back propagation)是神经网络中最具有代表性而且最成功的算法之一。它由数据流的正向传播和误差信号的反向传播2个过程构成。即误差输出的计算是从输入层到输出层,而对权值和阈值的调整则是从输出层到输入层的。BP算法的目的是利用梯度下降法来调整输入节点与隐层节点的联接权重和隐层节点与输出节点的联接强度以及阈值,使得网络的实际输出值和期望输出值的误差均方差最小[7]。权值和阈值的初始值对BP神经网络可靠性的影响很大,为此本文提出了利用PSO来寻找最优权值和阈值,避免BP神经网络陷入局部极小值,并提高其稳定性。
粒子群算法(PSO)是一种仿生算法,它是模拟鸟群觅食行为的智能优化算法,鸟群中的鸟在搜索空间中单独搜寻当前的个体极值(局部最优解),并将个体极值与整个鸟群里的其他鸟共享,找出最优的个体极值作为整个鸟群的当前全局最优解[8]。因为食物位置信息在鸟群间传递并不断更新,所以该算法能有更多机会求解全局最优解,避开局部最优解。使用PSO优化BP神经网络的目的是通过粒子群算法得到网络最优初始权值和阈值[9]。
本文使用的是经过PSO优化后的BP神经网络,它包括输入层、隐含层和输出层[9]。然后建立一个三维的空间,以温湿度传感器在空间内的坐标(x、y、z)作为输入层参数,将该坐标的温湿度值作为输出层,通过算法拟合可以获得坐标和温湿度值的函数关系。BP神经网络结构模型如图4所示。
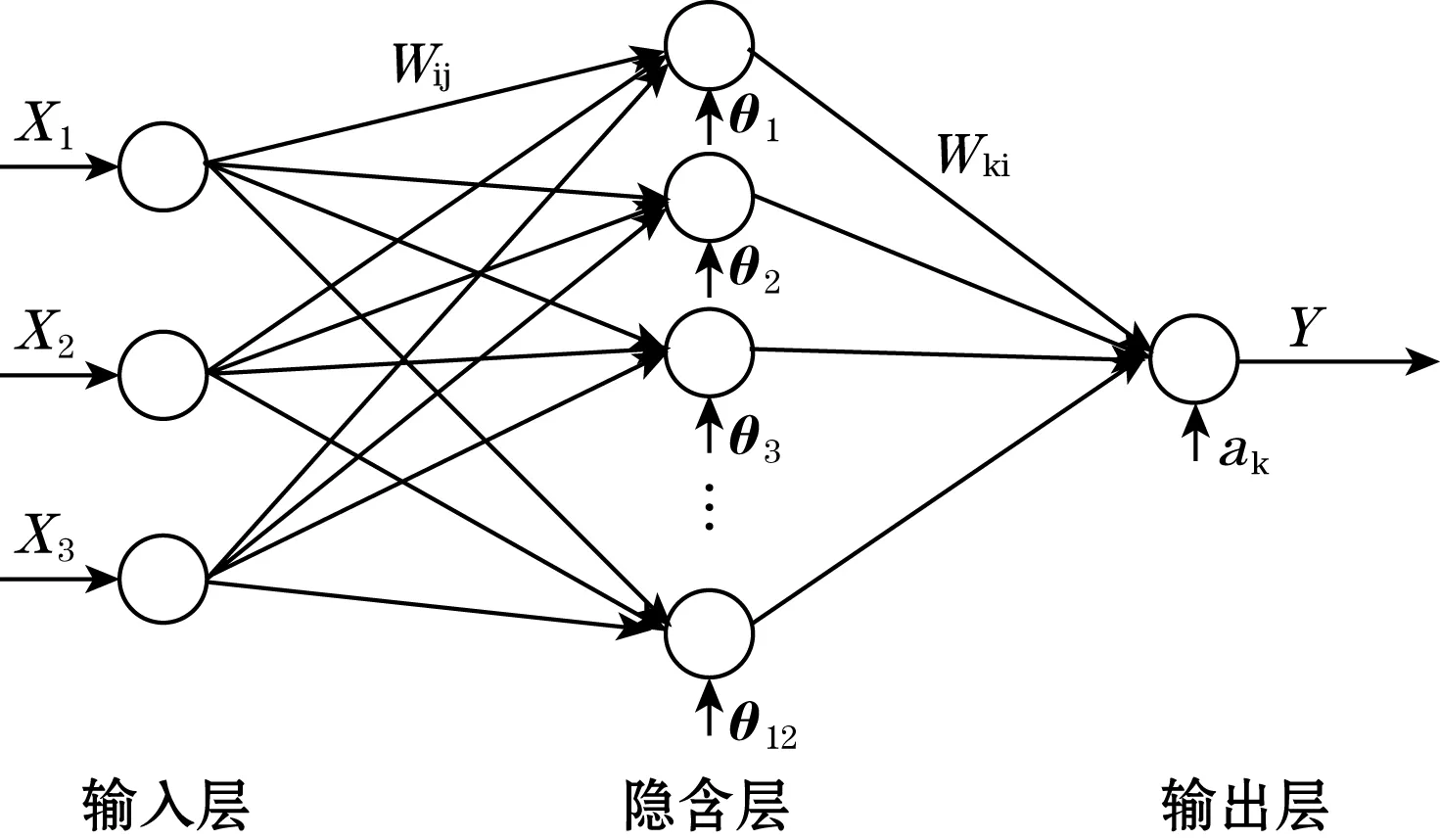
图4 BP神经网络模型图
设定BP神经网络输入层神经元为3个,输出层神经元为1个,隐含层神经元为12个,学习速率设为0.05,训练结果设为0.001,训练次数设为5 000,粒子群算法的种群个数为40,学习因子C1、C2为2,约束因子r为1[10]。将实验样本的90%作为训练样本,通过MATLAB对BP神经网络进行训练学习,并用另一部分数据进行测试。本文隐含层传递函数选择tansig,输出层传递函数选择purelin。温湿度传感器在空间内的坐标和对应的温湿度值之间关系式如下:
U=purelin{tansig(X·W1j+Y·W2j+Z·W3j+θi)·Wki+ak}
(5)
式中:W1j、W2j、W3j分别为纵坐标X、横坐标Y、高度坐标Z对应的由输入层到隐含层的权值;Wki为隐含层到输出层的权值;θ1、θ2,…,θ12为隐含层阈值;ak为输出层阈值。具体值如图5所示。

图5 训练后BP网络的权值和阈值
图5中:T1、T2是将2组温度值作为输出层神经元的训练结果;U1、U2是将2组绝对湿度值作为输出层神经元的训练结果;输入层节点数j=1、2、3;隐含层节点数i=1、2、…、12;输出层节点数k=1。
3 实验数据对比分析
在此实验中选取的是YGM-C系列的鉴定箱作为环境试验设备。为验证此设备内部两次的温度场和绝对湿度场是否稳定并且分布均匀。将环境试验设备设置温度为20 ℃、湿度为60%RH,将温湿度传感器放置在试验设备内,并记录下传感器的位置。使用BP神经网络拟合出温度场T1的分布,再通过温度、相对湿度和绝对湿度的换算关系推出绝对湿度,然后拟合出绝对湿度场的分布U1。重复上述的实验流程,但改变各个温湿度传感器放置的位置。使用BP神经网络拟合出温度场的分布T2,和绝对湿度场的分布U2。
在T1、T2的温度场中分别取30个对应相同位置的点,然后对比每个点的温度值,对比结果如图6所示。

图6 温度场结果对比
在U1、U2的绝对湿度场中分别取30个对应相同位置的点,然后对比每个点的绝对湿度,对比结果如图7所示。
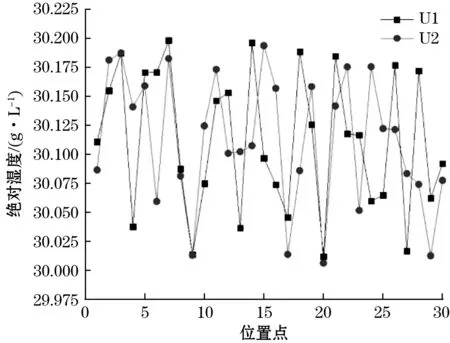
图7 绝对湿度场结果对比
通过对这60组数据进行分析和计算,温度场的最大绝对误差为0.07 ℃,均方根误差为0.041 ℃;绝对湿度场的最大绝对误差为0.1 g/L,均方根误差为0.063 g/L。可得出该设备内部的温度场和绝对湿度场分布均匀而且稳定。
4 结论
本文设计了一种适用于地面和探空观测传感器的多路温湿度巡检仪系统,使用电流源和四线制的测量方式,通过开关选择器连接具有内置低噪声放大器的24位∑-ΔADC对温湿度信号进行采集。通过LCD屏对温湿度数据进行实时显示,通道选择和采集时间间隔设定。并提出校验温湿度环境试验设备的一套算法。即通过PSO优化的BP神经网络算法,拟合出温度场和绝对湿度场分布,判断试验箱内部的温湿度环境参数是否达标。最后该系统有望在今后的探空站和探空仪生产厂商进行推广和应用。
