谐振式MEMS生物传感器系统检测电路设计
2020-07-13王栎皓朱银芳刘晓晨赵俊元郭阳宽杨晋玲
金 庚,王栎皓,朱银芳,刘晓晨,赵俊元,郭阳宽,杨晋玲*
(1.中国科学院半导体研究所,北京 100083;2.中国科学院大学,北京 100049;3.北京信息科技大学,北京 100192;4.传感技术联合国家重点实验室,上海 200050)
0 引言
基于MEMS微悬臂梁结构的生物传感器是国际传感领域的热点研究内容之一,其应用前景广阔。微悬臂梁生物传感器可以用来测量病原微生物、免疫蛋白、核酸等多种生物分子,能够满足不同精度和测量范围的探测需求,被广泛应用于医药筛选、疾病诊断、食品安全、环境监测等各个领域[1]。微悬臂梁结构的MEMS生物传感器,主要有两种基本工作模式:静态模式和动态模式[2-3],其中动态模式,即悬臂梁谐振状态测量模式,使微悬臂梁处于谐振状态,微悬臂梁的有效质量会因生物分子与其作用而改变,从而产生谐振频率偏移,被测生物分子质量可通过测量微悬臂梁的频率变化获得。微悬臂梁工作在动态模式时,对力以及质量的变化敏感度极高,具有极高的灵敏度和精度。这一特性可以应用在生物检测中,实现生物分子的超高灵敏检测。
目前,为了满足医疗检测、生物研究等领域的应用需求,谐振式微悬臂梁生物传感器需要实现便携式、多目标检测。常用的悬臂梁频率测量方法主要分为光学检测与电学检测,光学方法包括激光多普勒、激光位移传感等,通常包含较大的光学部件,不适合便携式应用。电学方法包括电容检测、压敏电阻等,电容式检测因需要在微悬臂梁结构上制备导电涂层,会降低悬臂梁的品质因数(Q),降低检测灵敏度。而通过将压敏电阻与悬臂梁结构片内集成,通过构筑惠斯登电桥,降低噪声,可以实现亚赫兹量级的频率测量分辨率。多目标生物分子联合检测,一方面可以提高检测通量,另一方面,对于癌症早诊等应用领域,多标志物联合检测可以显著提高检测准确性,降低假阳性与假阴性。基于悬臂梁的谐振式MEMS生物传感器,通过微悬臂梁阵列结构,可实现多目标的联合检测。由于微纳制造工艺容差,同一传感单元中的悬臂梁阵列频率存在一定差异,因此,驱动悬臂梁阵列进入谐振状态,并且快速跟踪和精确测量每根悬臂梁的谐振频率是多生物分子高精度检测的关键。
一个完整的MEMS生物传感器系统主要由生物样本进样系统、MEMS悬臂梁谐振传感单元、接口检测电路、微流体驱动控制系统等组成,其中进样系统提供生物分子检测的反应腔室,同时为微悬臂梁提供封装保护。MEMS悬臂梁谐振传感单元与接口检测电路实现被测信号传感与检测读出。由于MEMS悬臂梁生物传感器灵敏度很高,工作时易受环境温度变化、冲击振动、杂质干扰等的影响[4],因此,为了保证检测结果的重复性、稳定性和准确性,微流体驱动控制系统的精确可控的自动化进样、清洗、干燥等操作至关重要。
本文针对MEMS悬臂梁阵列传感芯片的接口检测电路、多通道微流体进样系统、以及微流体驱动控制系统等进行设计并优化,主要解决传感器信号闭环下的处理与读出,提高系统测量精度;解决微流体生物样本精确进样控制、快速切换及精确驱动。为传感器提供智能集成化的微反应平台,实现基于微程序控制器(micro-programmed control unit,MCU)的可控、多模式的生化反应及高灵敏、高精度检测系统。
1 MEMS悬臂梁生物传感器接口电路设计
本文中MEMS传感器采用课题组前期研制的多通道MEMS悬臂梁阵列传感芯片,图1(a)为悬臂梁阵列芯片的扫描电子显微镜(scanning electron microscope,SEM)照片,传感芯片为5通道,可同时检测4种标志物,其余1通道为参考梁,用于降低反应中非特异性吸附的干扰,提高检测精度[5]。
该生化传感器工作于微悬臂梁的动态工作模式,即谐振状态下,当检测样本中的待测物质与表面功能化的微悬臂梁发生特异性吸附后,悬臂梁的等效质量和弹性系数等物理参数会发生相应的改变[6],使悬臂梁谐振频率出现偏移。设计相应的频率跟踪与检测模块,即可实时测量悬臂梁谐振频率偏移量,从而获取被测样本中生物分子的种类和浓度等信息。微悬臂梁的信号检测电路主要由信号处理电路与频率测量电路两部分构成。
图1(b)是单通道悬臂梁及后端的惠斯登电桥电路,当悬臂梁处于谐振状态时,位于悬臂梁根部的压电电阻的阻值以同频率发生周期性变化。惠斯登电桥电路的工作原理如图2所示,在惠斯登电桥输入端施加电压Uin,由式(1)可得输出信号Uout的表达式,通过检测Uout即可获得悬臂梁谐振频率。

(a)SEM图 (b)单通道示意图图1 MEMS悬臂阵列SEM图及单通道示意图
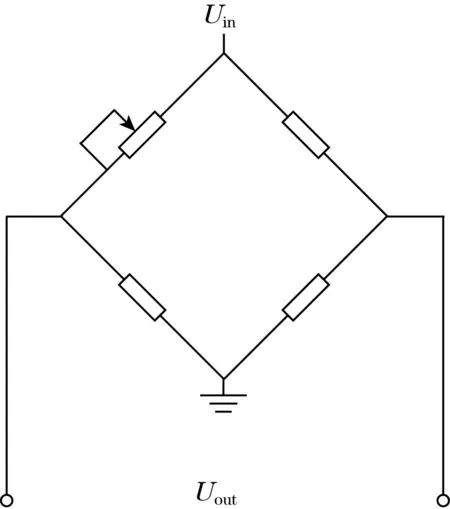
图2 惠斯登电桥电路
(1)
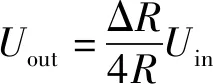
由式(1)可知,增大输入电压Uin有利于输出信号检测。然而,输入电压增大将导致悬臂梁根部的压阻功率变大,产生的热量使传感芯片温度升高,会影响悬臂梁对待测物质的检测准确性。为了保证高精度、高稳定性生物传感检测,惠斯登电桥需在较低电压下工作。此外,微悬臂梁尺寸小,即使在谐振状态,其振幅位移量通常只有几到几十nm,因此,悬臂梁传感芯片的输出信号Uout十分微弱,通常只有μV级别。本文先采用仪表放大器(AD8421,ADI)实现低失调电压、高线性度的两级放大电路,放大后的Uout信号可达数十mV;然后通过比较器将Uout输出的正弦信号转换为方波信号,进入锁相环进行锁相,锁相环的输出信号通过移相器进行相位调制,使得激励信号与悬臂梁谐振信号相位相差2kπ(k=0,±1,±2,…),悬臂梁始终处于闭环自激状态,如图3所示。通过放大、锁相、移相等模块保证了闭环系统的信号稳定性[7]。
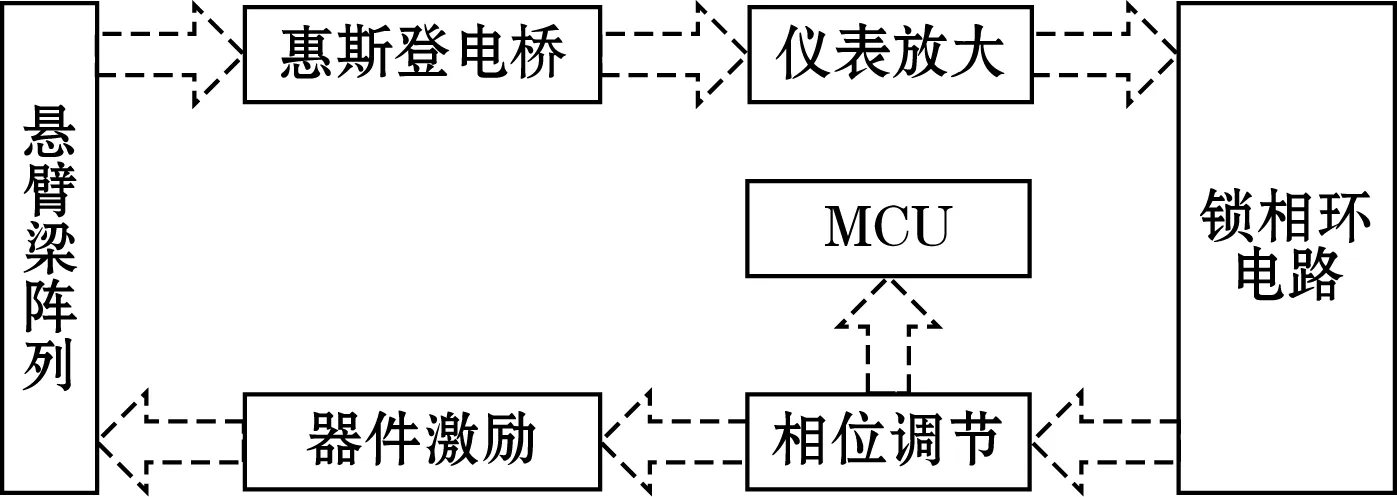
图3 信号处理电路框图
图3所示电路框图中,经相位调节后的信号输入MCU,根据方波信号采用等精度测量法进行频率跟踪测量[8],如图4所示。
图4 等精度测频原理
处理器内设置预制闸门时间T,在方波信号的上升沿或下降沿临时开启并对其进行计数,同时在此闸门时间内对标准时钟信号进行计数,分别得到脉冲计数数值m和n,由此可得待测信号的频率为
(2)
式中f0为MCU内置标准时钟频率,Hz。
采用等精度测量法时,标准信号的脉冲计数n存在±1的误差,故总体的相对误差δ可表示为
(3)
由式(3)可以看出,增大计数值n可减小频率测量误差,通常增大n的方法有2种:一是增加系统内预制闸门时间;二是为MCU配置高频率晶振。本文采用70 MHz的系统时钟,闸门时间为500 m/s,实现了小于0.01 ppm(1 ppm=10-6)的频率检测误差。
2 微流体驱动及控制系统
微流体驱动控制系统的主要功能是实现传感芯片生化检测进样、反应、清洗、干燥等过程的自动化控制。首先,将被测生物样液输送至微悬臂梁传感芯片的敏感区域,实现目标分子与微悬臂梁表面修饰分子的捕获结合;反应结束后,输送PBS等生物反应清洗液,有效去除非特异吸附分子,提高检测的信噪比。由于微悬臂在液体中的品质因子较低,为了实现高灵敏检测,在清洗完成后,需对悬臂梁传感芯片进行吹气干燥。对于高灵敏微纳生物传感检测,检测样本中目标分子含量较低,生物反应条件如微流体的流速、流向、反应时间等对检测结果影响较大,解决该影响需要研究与设计精确的系统驱动控制方法,实现对待测微流体样液送样、清洗、干燥等过程的精密控制。
图5是本文采用的微流体系统控制电路框图。微流体驱动控制系统电路包括MCU、蠕动泵[9]、气泵以及配套的硬件驱动控制电路。负载相应的嵌入式驱动控制程序,实现生化反应微流体精密驱动控制。
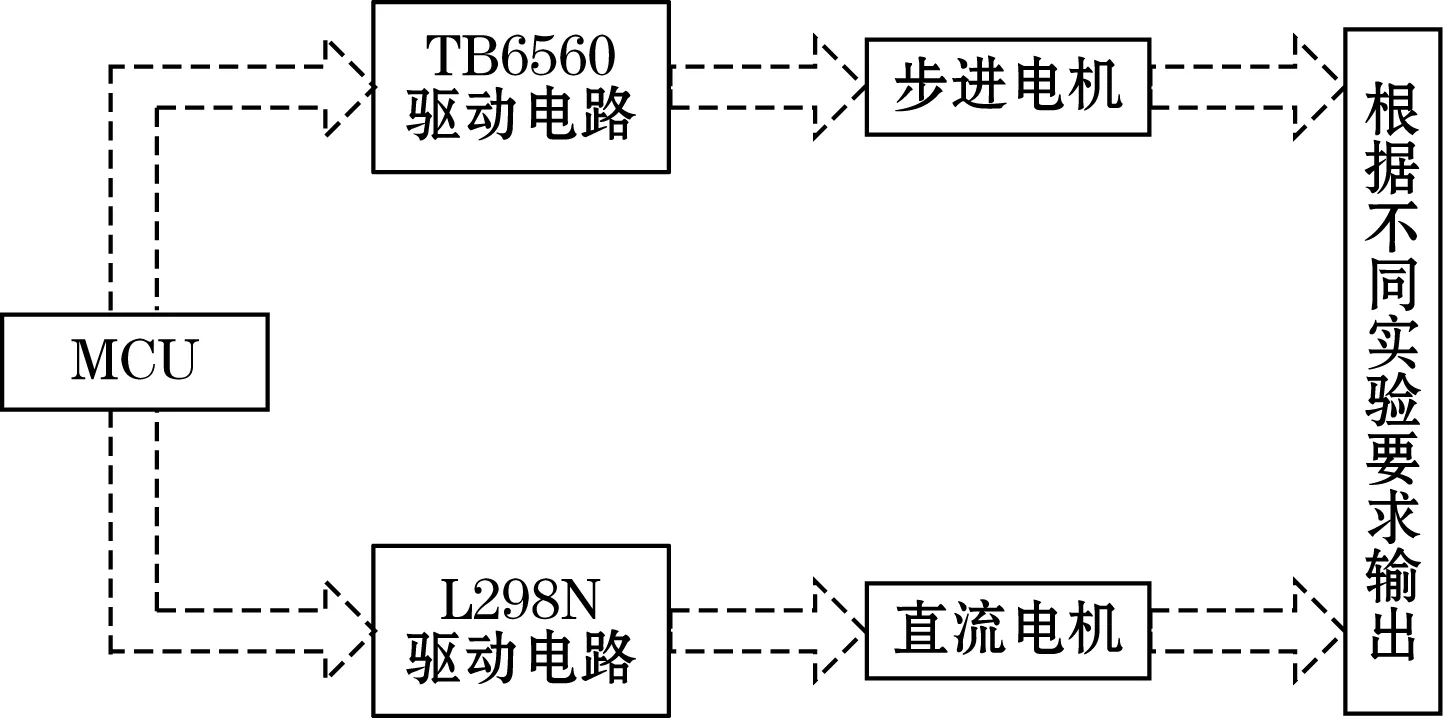
图5 微流控系统电路框图
蠕动泵步进电机的转速调节嵌入式程序采用PWM波调速方法,实现对步进电机的精密转速控制,该方法是通过改变PWM的频率来实现转速的调节,脉冲信号的驱动能力是通过增加PWM波占空比来实现。如图6所示为PWM调速原理,第一波形是时钟信号,对比第三条波形与第四条波形,通过改变PWM波周期实现调速;对比第四条波形与第二条波形,通过改变占空比实现调速。
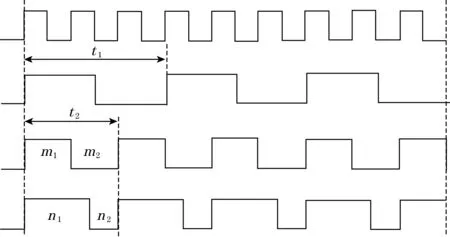
图6 PWM波形示意图
PWM波的频率根据电机的实际参数确定,为保证电机的扭矩达到最大,由式(4)确定PWM波频率,使公式左边项远远大于右边项。
2πfL>>R
(4)
式中:f为频率;L为电枢电感;R为电枢电阻。
为了使步进电机启动运转平稳以及提高电机使用寿命,采用S型曲线模式进行电机的加速减速操作[10],不直接给电机加以一定的高速运转。电机的转速与PWM脉冲信号频率的关系为
(5)
式中v为电机转速,rad/min;f为PWM信号频率, Hz。
由式(5)可知,当步进电机的细分数M以及步进电机的步脚距θ确定时,电机转速与PWM频率成正比。利用MCU机器周期与指令周期关系编写延时函数生成频率可调的PWM波,其中变量i与k用于设定延时时长,调用delay函数用于调节占空比。由式(5)调整PWM信号的频率对蠕动泵转速进行设置,同时改变MCU对TB656AHQ驱动电路的使能逻辑,最终由嵌入式程序实现电机在不同挡速下的循环正反转,为系统提供进样、反应、清洗操作。延时函数如下:
void delay(uint i){
uchar j,k;
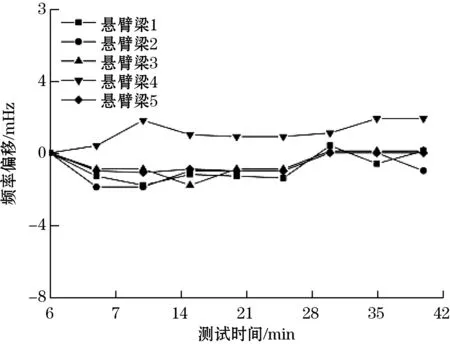
for(j=0;j for(k=0;k<50;k++);} void motor_run(){ while(1){ mai_chong=~mai_chong; delay(3);}} 对于蠕动泵进液量精度的控制,蠕动泵的进液量与泵管内径、泵转子圆周直径以及转子转角有关,对于蠕动泵进液量的精密控制可通过嵌入式程序控制转子转角实现。蠕动泵进液量计算公式: (6) 式中:Q为蠕动泵进液量;D为泵转子圆周直径,m;d为泵管内径,m;θ为转子转角,rad。 本文使用蠕动泵转子圆周直径为2 cm,泵管直径为1 mm,转子最小转角为1.8°,因此可以计算本系统最小控制液量精度为 (7) 本文基于L298N的驱动电路通过调节直流电机工作电压控制直流电机,使直流电机工作在合理转速下,为气阀提供一个稳定的气流速度,实现微系统对微流道环境的吹气干燥操作。 对文中设计的悬臂梁接口电路进行开环测试,采用Agilent MXG函数发生器产生幅值为10 mV、频率在180~300 kHz(MEMS悬臂梁频率)范围内的正弦波信号,记录MCU测量的频率值与输入值的差异,测试结果如图7所示,可以看出,在输入信号范围内,测量值与输入值的误差在±0.3 Hz内,相对误差小于2 ppm,对于4 Hz悬臂梁测试噪声,文中设计电路完全满足对MEMS悬臂梁传感器的频率测试精度要求。 图7 悬臂梁接口电路开环测试 对MEMS悬臂梁芯片进行闭环测试,在40 min内每5 min对传感器阵列进行频率测量,以第一次测量值为基准,40 min内5根梁的频率偏移如图8所示,可以看出在40 min内5根梁的测试频率值稳定在±0.002 Hz内,测试抖动小于0.015 ppm,表明悬臂梁测试电路闭环工作下具有良好的重复性与稳定性。 图8 闭环频率测试稳定性 进一步地,利用本文设计的生化测试系统对0.1 mol/L的PBS(phosphate buffer saline)磷酸盐缓冲液进行测试。PBS清洗是生物反应中关键的一步,清洗的效果直接决定着反应后悬臂梁的底噪水平。采用500 μL/min的PBS缓冲液循环反应5 min,800 μL/min的DI水清洗10 min,气泵干燥5 min。对同一组悬臂梁阵列进行3次重复实验,测试频率变化值如表1所示,可以看出,经过反应、清洗、干燥等过程处理后,悬臂梁频率下降值小于3 Hz(5 ppm),与悬臂梁系统噪声相当,满足MEMS悬臂梁传感器在生物检测应用中的要求。 表1 PBS样品系统测试 Hz 本文设计了基于MEMS悬臂梁的生物测试系统,经过实验验证,频率跟踪检测电路以及微流体驱动控制系统可以实现对MEMS传感器的精确测量与控制,实验数据表明测试系统具有良好的重复性、工作稳定,并且极大地缩小了检测设备体积、降低了测试成本。系统开环测试误差小于±0.3 Hz,闭环误差小于±0.002 Hz,微流体控制精度低至0.247 μL,对PBS样液测试效果满足预期目标,为MEMS生化传感器的推广奠定了基础,具有广阔的实用前景。
3 测试与结果分析


4 结束语
