车路协同环境下交通业务服务系统设计与开发
2020-07-11马万经郝若辰戚新洲俞春辉
马万经,郝若辰,戚新洲,俞春辉,王 玲
(同济大学 道路与交通工程教育部重点实验室,上海 201804)
0 引言
智能网联汽车已进入高速发展时期,《中国制造2025》[1]将其列为重点发展方向之一:到2020 年掌握智能辅助驾驶总体技术及各项关键技术,初步建立智能网联汽车自主研发体系及生产配套体系;到2025年掌握自动驾驶总体技术及各项关键技术,建立较完善的智能网联汽车自主研发体系、生产配套体系及产业群。智能网联汽车的潜能需要结合一系列车路协同环境下的应用实现。这些应用依据国标分为信息服务类、安全类和效率类,现有应用多集中在前两类[2],而研究多集中在效率类。例如,利用网联车轨迹数据实时优化信号配时[3-4],基于信号灯信息实现速度诱导[5-9],或对两者同时进行优化[10-12]。更有研究基于智能网联车,提出车辆轨迹与信号配时协同优化乃至无信号灯交叉口控制,提高交叉口时空资源的利用效率[13-17]。越来越多的前瞻性研究表明,车路协同环境为构建新型的高效通行机制提供了技术基础。在实际交通场景中,往往需要同时实现安全、效率、信息服务等多类应用。而不同应用对于系统框架的不同需求可能导致资源浪费乃至冲突。在这样的背景下,有必要梳理现有应用及演进方向,总结典型业务,以业务所含应用的集成实现为目标进行系统设计。然而,现有研究多面向独立功能实现和独立应用实现的展示场景[18],无法很好地解决资源浪费和应用冲突问题。本文基于实际交通管理需求和真实道路运行场景进行应用的整合,以实际交通场景中的多应用协作运行为导向进行系统设计,建立一个可以适用于各类业务及其所含应用的通用系统,避免不同应用在真实道路上独立部署可能出现的应用指令级别冲突、信息流冲突以及基础设施的浪费。
1 车路协同应用发展分析
智能网联汽车为交通行业带来了信息交互、交通感知和车辆轨迹控制等技术的变革。现有国标的17 项应用中,安全类应用达13 项[2]。目前为止,国内以中国汽车工程学会、中国通信标准化协会、车载信息服务联盟、未来移动通信论坛为主要的研究平台,国际上以ETSI-SAE,3GPP,5GAA 为主的研究组织,关注的应用主要都集中在安全方面。原因主要有两点:
(1)技术难度。现有的通信技术已能满足安全出行应用对通信的可靠性和频率要求,而效率类应用还对车辆控制技术和跨平台信息集成技术提出了更高要求。
(2)市场接受度。安全问题是市场的痛点,而现有安全类应用主要依托信息发布手段,开发周期短,是合理的市场切入点。因此,车路协同环境下的交通业务服务系统应先以信息服务类应用为依托,以安全出行类应用为突破口,建立明确的市场和坚实的通信技术基础。而后,通过不断丰富安全类、效率类和信息服务类应用,进一步完善该服务系统。随着通信技术和车辆控制技术的提高,安全类、效率类和信息服务类应用将朝个体定制化、精细化、高效化的方向演进,如图1 所示。其中,将演进分为共性演进方向和个性演进方向:个性演进方向指某些应用的特定演进;共性演进方向指该种演进可以全方位提升各类应用的实现效果,如车辆可控性的增加以及通信环境的增强等。目前学界提出的个性演进方向主要包括编队管理、交通管理、收费策略、停车管理等,如IEEE 世界交通大会主席Urbano J.Nunes 总结提出的框架等[19]。从总体上看提升效率的业务将逐渐增加,从个性上看,安全和效率提升都会向精细化方向发展,信息服务业则继续作为其他业务的载体并实现基础信息发布业务。

图1 现有热点应用及演进
随着图1 中应用的成熟,同一场景中会并存若干应用。例如,在高速公路管理中,当出现故障车辆时,异常车辆提醒、前向碰撞预警、紧急制动预警、调节宏观交通流速度差的限速预警、拥堵提醒等都可能会被同步触发。由此可见,应用会在实践中依托场景、事件逐步演进为集安全、效率、信息发布为一体的多应用集成业务。本文在现有应用和演进方向的基础上,整合需求场景和各类应用得到14个集成业务,如表1所示。
图1 中所有业务所含应用在表1中每个业务最后一列都有所体现,涵盖了全部子应用及演进方向(子应用及演进方向编号见图1),应当注意的是,共性演进方向并未在表中标出,而是将其作为总体背景进行考虑。一方面,这些集成业务是基于现有应用及演进方向提出的,另一方面,集成业务基本涵盖了现有道路交通环境场景。如纯安全方面应用,公路上考虑交通流状态变化时的安全问题,城市道路主要考虑慢行交通安全;效率应用则多由原安全应用发展而来,在保证安全的前提下对效率进行了进一步优化,公路上的效率应用中,考虑瓶颈点控制、正常路段编队行驶、特殊车辆行驶需求,城市道路的效率应用中,考虑更为全局化和个性化的瓶颈点控制与优化、路段的动态化和精细化管理以及公交专用道的使用,另外还考虑了停车问题;信息服务方面综合考虑各层次信息,为社会车辆、电动车辆乃至个体出行者提供必要的出行信息和方案。总之,集成业务表涵盖了连续流路段、连续流匝道、间断流路段、交叉口等主要交通场景和慢行交通、驾驶员、公众等主要交通参与者,实现了基本场景、现有应用及演进的全覆盖。本部分将此集成业务体系作为系统结构的设计基础和目标。

表1 车路协同环境下交通业务总结
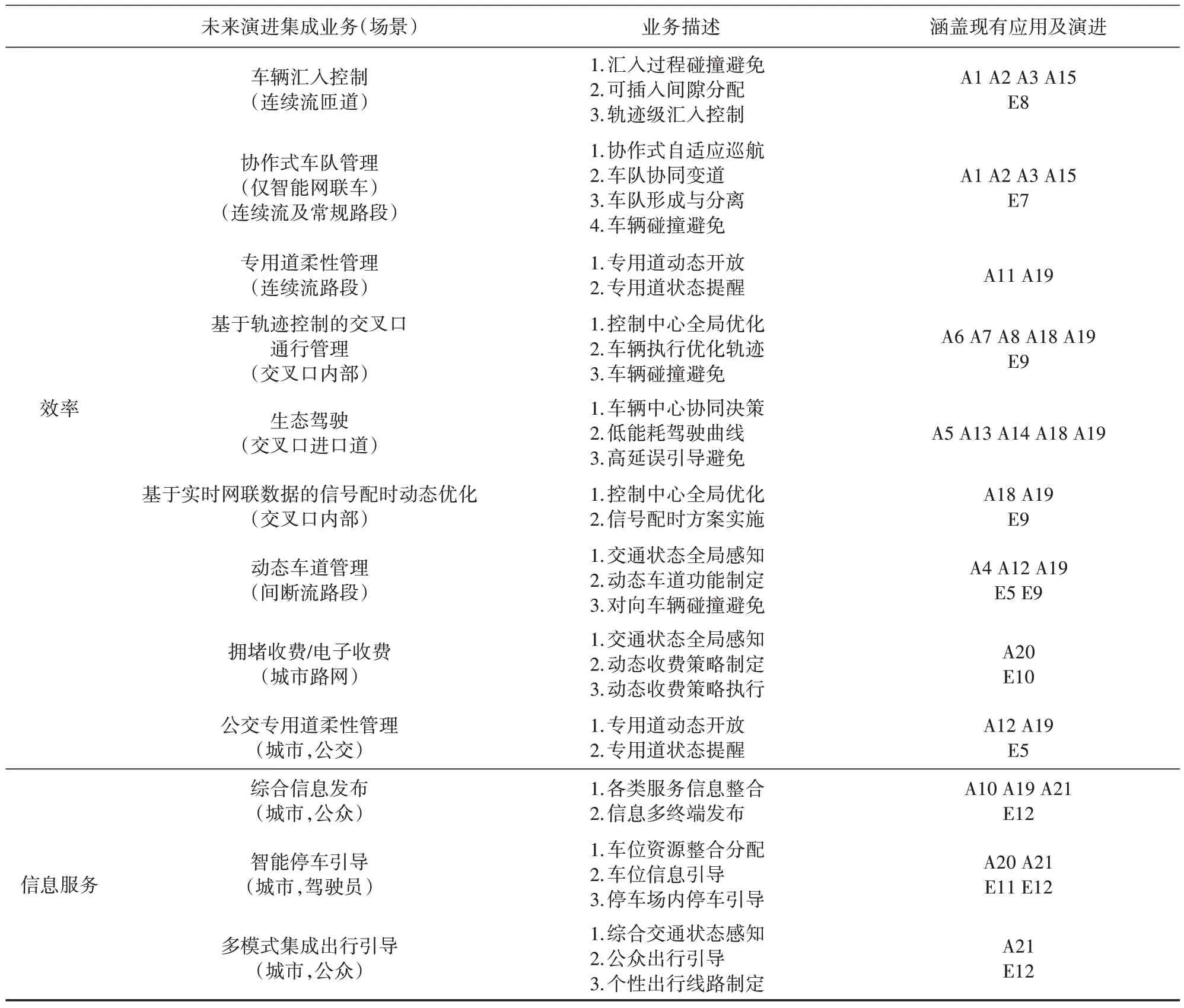
表1 (续)
2 系统架构设计
交通业务服务系统由云端、路侧端和车载端三部分组成。路侧端与车载端通过LTE-V-Direct/5G-Direct 通信连接;路侧端与云端通过LTECell/5G-Cell通信或有线通信连接;车载端与云端通过LTE-Cell/5G-Cell 通信连接。云端接收、处理和发送区域级服务及管控诱导信息,可通过LTE-Cell/5G-Cell 通信发送给车辆,也可根据路侧端上报的交通状态等信息生成区域初步指令并发送给路侧。路侧端结合检测器、车载端和云端信息制订和发布控制方案。车辆端整合车辆与环境各方面信息,提取并广播自身状态,同时汇总信息并给出驾驶引导,供驾驶员决策或将控制指令下达给车辆控制器。车路协同环境下交通业务服务系统架构见图2。

图2 车路协同环境下交通业务服务系统架构图
路侧端与车载端的核心设备分别为路侧控制单元和车载控制单元,也是本系统的核心设备。这两个控制单元的系统定位在于:(1)路侧单元连接云端、信号机和检测器,承载各路侧功能模块算法;(2)车载单元承载各车载功能模块算法,实现与道路周边环境及驾驶员的交互。两个核心设备具备通信功能,集成了大部分功能算法,是系统得以实现的核心。在实现的功能中,诸如车队管控、动态限速等功能在部分实现环境中需要云端、路侧单元和车载单元的协同合作。本文依据各单元扮演的角色,对功能的实现进行拆分并归入各单元对应的模块中。云端根据车辆、路侧单元提供的交通状态信息进行宏观层面决策,并基于应用执行环境及要求将初步决策指令提供给路侧单元或车载单元。路侧单元结合控制路段内交通情况,对初步决策指令进行优化和细化,转化为可执行指令或目标指令(如车队管控指令、个体控制指令、车速引导指令等),并提供给车辆。车载控制单元将收到的指令进行汇总。考虑到收到的控制指令可能存在冲突,车辆将根据周边环境信息及车辆行驶工况对控制指令进行整合和细化,转化为可执行指令传递给车载控制器或驾驶员。若涉及车辆间协同指令,车辆需根据在车队中的身份进行指令的进一步制定、发布及接收。
3 业务布局设计
前文表1 总结的集成业务涵盖了图1 所列的现有应用及其演进方向,故本系统可满足现有应用及其未来发展演进乃至集成的兼容需求。图2系统中的各功能模块可以完整兼容表1 中的集成业务列表。各部分功能的实现以及各通信链路上传输的信息如表2 所示。需要说明的是,系统框架可适用于纯网联和新型混合流环境,控制对象可包括网联车及网联自动驾驶车。本系统框架主要关注业务功能的实现,不详细探讨各类应用在不同交通环境和控制对象下的具体算法。

表2 车路协同环境下的业务实现说明表
4 系统案例验证
本文重点测试车载控制单元及路侧控制单元两个核心设备与其他设备的联通性和算法承载能力,包括车载单元功能和路侧单元功能实现。选用碰撞预警和车速引导及信号优先分别作为具有代表性的安全类和效率类样例应用。其中,车速引导及信号优先应用包含了车内信号灯功能这一典型的信息服务类应用。因此,本文的样例应用涵盖了所有应用种类。
4.1 功能架构
车载控制单元实现的算法包括碰撞预警和车速引导。车辆碰撞预警的关键在于车辆距离判断和冲突方位判断。根据GPS 坐标计算两车辆间的直线距离,再根据车辆行驶方向确定是否冲突以及冲突时间、预警方向等关键要素。车速引导包含两个层次:
(1)确定驾驶员车速引导区间。根据车辆至停止线距离和速度计算到达时间窗,确定与信号配时绿灯时间区间的交集,以此计算不停车通过的车速区间。
(2)确定面向生态驾驶的加速度曲线。借鉴现有研究[20],将时间离散化,并假定车辆在每个时间间隔内以恒定加速度行驶(包括匀速行驶和停止状态)。以保障车辆在绿灯时间通过交叉口为约束,以车辆油耗最小为目标,建立线性规划模型,求解最优的车辆加速度曲线。
路侧控制单元实现的算法为信号优先控制。路侧单元接受车辆优先请求并获取车辆的实时位置、速度等信息,确定针对两相位信号灯的信号优先策略,包括红灯早断及绿灯延长。本研究主要验证样例应用的系统可行性,故采用简单的绝对优先策略,具体算法流程如图3所示。
4.2 物理架构

图3 信号优先算法流程图
本系统依托国家智能网联汽车(上海)试点示范区封闭测试区进行系统集成测试。测试区配备有信号控制机及其控制的信号灯,信号控制机的信号配时方案可通过测试区的控制中心(云端)进行远程修改。车载端包括车载通信单元与车载控制单元/人机交互设备。采用车载平板电脑作为车载控制单元/人机交互设备,开发实现样例应用算法。路侧端包括路侧通信单元和路侧控制单元。采用小型工控机作为路侧控制单元,开发实现样例应用算法。工控机与信号控制机通过网线连接,可依据通信协议修改信号控制方案。
系统物理架构及信息流如图4 所示。车载控制单元接受驾驶员的需求信息(如优先请求),车载通信单元将需求信息和车辆状态信息发送到路侧通信单元。路侧控制单元整合路侧通信单元传输的各车辆信息优化信号配时方案,并将优化结果传达给信号控制机。同时,信号配时信息会通过路侧通信单元和车载通信单元发送给车载控制单元,车载控制单元进一步通过UI界面实现车辆驾驶引导功能。
UI 界面设计如图5 所示。左侧为车速引导及信号优先功能区,包括信号灯显示、车速显示、引导车速区间及曲线显示。中间为车辆碰撞预警显示区以及需求交互区,驾驶员可在该区域收到碰撞预警信息或发出优先请求。右侧区域为地图区,驾驶员可以观测到车辆实时位置及地图信息。

图4 案例系统物理架构及信息流图

图5 UI界面设计
4.3 实现效果
系统测试效果良好。在碰撞预警测试中,当车辆出现碰撞危险时,会在冲突方位显示红色块并发出声音提醒。车身周围共设计了8 个冲突方位,图6为正前方的碰撞预警场景。

图6 碰撞预警UI界面
在车速引导及信号优先测试中,车速引导UI界面会显示灯色、倒计时以及驾驶员引导车速,其中的绿色条形为不停车通过的车速区间,如图7 所示。驾驶员通过调整车速将代表实际车速的白条移动到绿色区间内,即能不停车通过交叉口。UI 界面左侧下方为更为精细的车速引导曲线,绿色曲线为计算出的最优曲线,粉色曲线为实际行驶曲线。驾驶员可以通过UI界面请求交叉口优先通行权,车载端将优先请求指令发送给路侧端,路侧端收到信息后进行反馈,车载端在接受反馈信息后显示优先请求处理结果。

图7 车速引导UI界面
本系统的核心设备包括车载控制单元和路侧控制单元。车载控制单元可作为独立设备进行安装,路侧控制单元可通过网线连接安装在路侧信号控制机中,并通过通信协议实现信息交互。因此,本系统具有较好的可移植性。
5 结语
本文设计了车路协同环境下的业务服务系统架构,总结展望现有应用,结合用户需求和基本场景进行业务集成。为满足集成业务需求,依托车载控制单元和路侧控制单元将云端处理中心、信号控制机、车辆、通信设备、检测器等进行了有机整合,形成了业务系统设计方案。本系统包含的集成业务涵盖各类基本场景及主要应用,具有较好的整体性和兼容性。在系统中,云端通过路侧端感知整体交通状态,制订初步方案,整合综合信息并发布给车载端和路侧端;路侧端通过整合云端宏观方案、车载端信息和路侧感知信息制订管控方案;车载端通过整合路侧端、云端信息和指令进行决策。依托国家智能网联汽车(上海)试点示范区封闭测试区进行了系统集成测试,包括碰撞预警(典型效率类应用)和车速引导及信号优先控制(典型安全、信息服务类应用)。结果表明,系统具有良好的适应性和可移植性。
后续研究中,需要对案例系统进行扩充,结合5G 技术的发展进行业务框架和数据流的扩展及调整,考虑同一场景的多应用“并发”问题,进一步探究所提出的集成业务在实际应用过程中的问题和解决方案。
