旋转永磁式机械天线的研究与实现
2020-07-10魏志虎何攀峰
周 强,施 伟,刘 斌,魏志虎,何攀峰,张 江
(国防科技大学 第六十三研究所, 江苏 南京 210007)
极低频(Extremely-Low Frequency, ELF)、超低频(Super-Low Frequency, SLF)、特低频(Ultra-Low Frequency, ULF)和甚低频(Very-Low Frequency, VLF)等低频电磁波具有优异的海水穿透和绕射能力,因而低频电磁通信在对潜指挥、水下和透地通信以及导航、定位等领域具有巨大的应用潜力[1],也是当前实现对潜战略通信的有效手段[2]。
实际应用中,由于天线尺寸远小于波长,现有低频发射天线均为电小天线(Electrically Small Antenna, ESA),依靠导体中的振荡电流激励电磁波,可等效为一个振荡偶极子。通过定义辐射品质因数Qrad,Chu等[3-4]给出了ESA的一个理论限制,即Qrad最小值可表示为:
Qrad=ωWsto/Prad>1/(ka)3+1/(ka)
(1)
式中,ω为谐振角频率,Wsto为周期平均储能,Prad为辐射功率,k=ω/c为真空中的波数,c为光速,a为包围天线的最小辐射球[5]半径。由式(1)可知,当ka≪1时,ESA的Qrad近似与(ka)3成反比。这表明:天线尺寸越小,Qrad就越大,天线带宽就越窄,在辐射功率一定条件下,天线辐射功率和效率就越低。
由于上述理论限制,ESA的辐射性能直接受限于天线尺寸,使得现有低频电磁发信系统存在天线体积庞大、设备复杂、辐射效率低、发射功率及能耗大等问题,已成为低频电磁通信在相关领域应用发展的重要瓶颈,因此急需创新低频电磁发射的新理论和新技术。
针对上述瓶颈问题,2016年12月,以替代依靠振荡电流激励的传统ESA为目标,美国国防部高级研究计划局(Defense Advanced Research Projects Agency, DARPA)首次提出了“机械天线”(Mechanical Antenna, MA)的概念和项目构想[6-7]。如图1所示,所谓MA,即通过特殊材料,如驻极体(在强外场作用下极化并“永久”保持极化状态的电介质)或永磁体(在开路状态下能“永久”保留较高剩磁的磁体)的机械运动直接激励并发射低频电磁波的新型低频电磁发信技术。
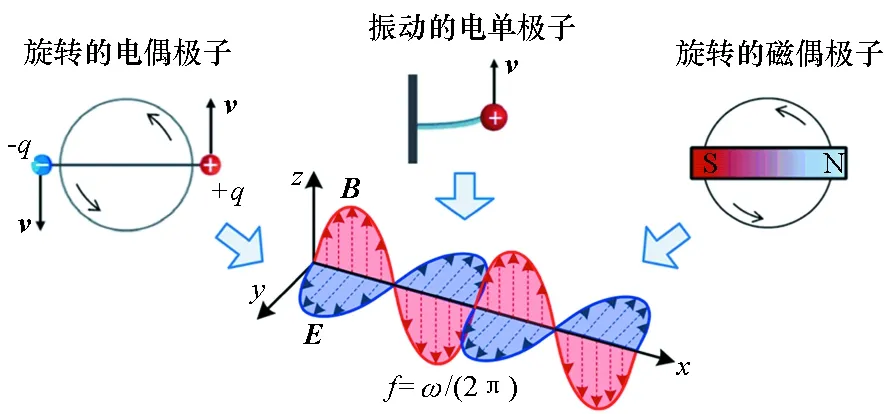
图1 MA的主要形式及基本原理Fig.1 Basic principle and main form of MA
利用高性能驻极体和永磁体,MA不需消耗能量就可直接产生静态强电场或强磁场,而传统ESA需消耗巨大能量才能产生等效电场或磁场[6]。由于没有高电抗问题,MA可省去匹配和调谐网络及其带来的额外损耗。此外,作为机械系统,MA近场储能不需在天线和匹配网络之间进行谐振转换,没有额外能量转换损耗,有利于进一步提高辐射效率。基于上述优势,MA有望突破传统ESA的理论限制[8]。
不同于传统无线电发信机,MA的信息加载在机械驱动环节实现。结合低损耗和低阻尼的运动激励与控制技术,MA有望利用很小能量即可直接产生低频电磁波并实现信息加载。因此,MA不只是一种低频发射天线,还是一种颠覆现有射频发信机架构的全新低频电磁发信系统,有望实现小型化与低功耗,从而显著提高其应用的灵活性和机动性。
2017年8月,DARPA正式启动AMEBA(a mechanically based antenna)项目,拟用45个月完成相关技术研究与验证。鉴于MA技术的前沿性和颠覆性,从2017年初开始,我国的国防预研计划也发布了相应基金和项目指南,对MA的新理论和新技术给予了重点关注。在相关项目的牵引下,国内外多个高校和科研机构分别对MA进行了初步研究和探索[8-16]。
得益于稀土永磁材料[17]及旋转驱动技术[18]在各领域的成熟应用,基于旋转永磁体的MA方案成为业界的研究热点。其中,针对ULF和VLF应用,文献[8-10]研究了旋转永磁式MA(Rotating-Magnet Based MA,RMBMA)的远场辐射特性,提出了基于旋转永磁体阵列并有望突破传统ESA物理极限的RMBMA技术方案,初步给出了RMBMA的Q值极限公式。针对RMBMA近区磁场按1/r3快速衰减问题,文献[11-12]通过引入有源电磁偏置,提出了一种可增强其输出磁场的技术方案,并进行了实验测试。基于安培电流模型,文献[13]推导了RMBMA在均匀有损介质中产生时变电磁场的表达式,并对其分布与衰减特性进行了仿真与实验验证。可以看出,当前RMBMA研究主要针对旋转永磁体的辐射特性及其信息加载方法,未涉及旋转驱动与控制特性对RMBMA工程实现及其传输性能的影响。
基于钕铁硼(NdFeB)永磁体和永磁同步电机(Permanent Magnet Synchronous Motor, PMSM),本文提出了一种RMBMA技术方案,建立了基于电-机械-电磁能量转换的系统模型,结合对其时变电磁场的分布与衰减特性研究,给出了辐射功率与辐射效率的表达式,提出了针对移频键控(Frequency Shift Keying, FSK)的信息加载方法,并对该RMBMA技术方案和信息加载方法的可行性和有效性进行了仿真和实验验证。
1 RMBMA技术方案及其系统模型
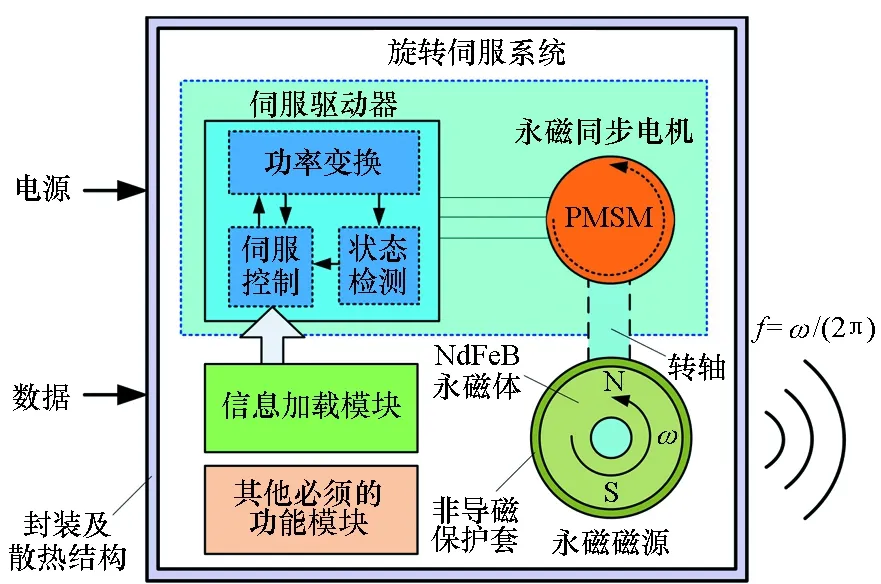
图2 一种RMBMA技术方案示意Fig.2 Diagram of a technology solution for RMBMA
为实现对永磁体的高效旋转驱动与状态控制,本文提出的RMBMA技术方案如图2所示,主要由永磁磁源(永磁体)、旋转伺服系统、信息加载模块及相应输入接口、封装与散热结构等构成。电源接口主要对旋转伺服系统和相应控制模块供电。数据接口将码元数据送入信息加载模块,实现调制参数与运动状态控制参数之间的映射转换,产生输入给定信号。
1.1 高性能永磁材料与磁源结构
磁源的磁偶极矩正比于永磁体体积V与永磁材料的剩余磁化强度Mr[13]。为实现小型化和低功耗,在保证所需磁偶极矩的同时,应尽可能减小磁源体积和重量,以减小其惯性负载和带来的运动损耗。为此,永磁磁源采用NdFeB永磁体、转轴和非导磁保护套等构成。
其中,NdFeB永磁体是目前磁性最强的永磁材料[19],其Mr可达106A/m以上。为降低旋转阻力,永磁体采用圆筒形,可采用如图3(a)所示的平行充磁或图3(b)所示的海尔贝克(Halbach)阵列结构[20],后者可减小极间漏磁,实现与PMSM的磁隔离。非导磁保护套可降低永磁体高速或超高速旋转时承受的机械应力。
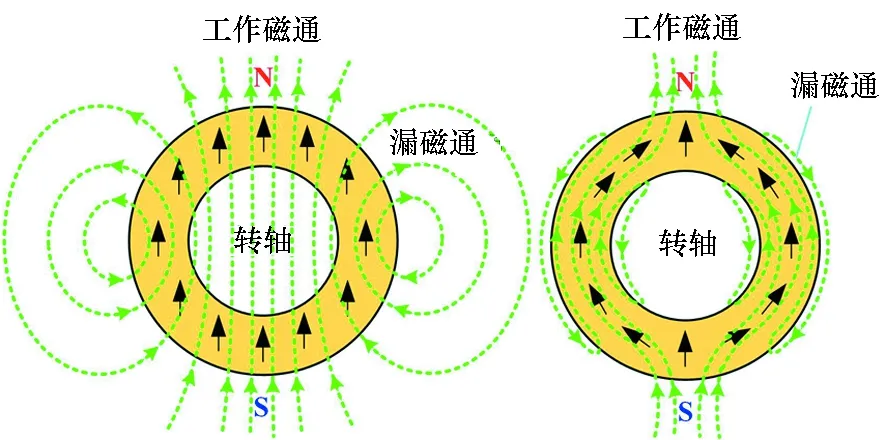
(a) 平行充磁(a) Parallel magnetisation (b) Halbach阵列(b) Halbach structure图3 磁源结构及其磁场分布示意Fig.3 Diagram of magnetic source structure and magnetic field distribution
1.2 高效旋转驱动与状态控制系统
磁源旋转产生的电磁波频率f与其转速n和磁极对数N成正比,即n=f×60/N。以1对磁极为例,对应SLF、ULF、VLF频段,n需分别达到1800~18 000 r/min、18 000~180 000 r/min和180 000~1 800 000 r/min。针对上述要求,高速和超高速电机[21-22]具有体积小、功率密度高、与负载直接相连、传动效率高等特点,适用于RMBMA的高效旋转驱动。在常用的高速和超高速电机中,PMSM在效率和功率密度上具有综合优势[23],因此本方案采用基于PMSM的旋转伺服系统实现对磁源的高效旋转驱动与状态控制。对于ULF以上频段,电机本体应采用无槽结构,以减小PMSM齿槽效应在高速时带来的损耗和振动问题[24]。
如图2所示,旋转伺服系统由PMSM和伺服驱动器构成。伺服驱动器由状态检测、伺服控制和功率变换模块构成。根据输入给定信号和状态检测模块输出的转子状态信息,结合一定控制策略,伺服控制模块实时改变功率变换模块的电压和电流,以实时调节PMSM输出转矩,使磁源旋转状态实时跟踪输入给定,从而实现所需电磁信号的发射。为提高动态跟随性和抗负载扰动性,可采用基于自抗扰控制器[25]的速度伺服控制策略,以提高带宽和信噪比。
1.3 信息加载模块及其转速控制方法
为提高功率放大器效率,低频电磁通信主要采用FSK和最小移频键控(Minimum Shift Keying,MSK)等恒包络调制策略。RMBMA通过改变磁源的旋转运动状态实现信息加载,因此需将频率、相位等参数映射为磁源的旋转运动状态,从而产生旋转伺服系统的输入给定。

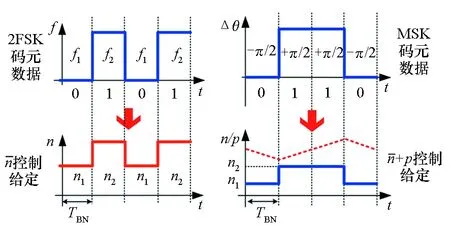
(a) 2FSK (b) MSK图4 2FSK和MSK的转速控制信号产生示意Fig.4 Schematic diagram of speed control signal generation for 2FSK and MSK
1.4 基于能量转换的RMBMA系统模型
对于图2所示的电—机械—电磁能量耦合系统,建立其系统模型。如图5所示,旋转伺服系统将输入的电功率Pin转换为驱动PMSM转子和磁源机械旋转的电磁转矩Tem,克服轴承、风阻等带来的摩擦阻尼RΩ和转动惯量J的惯性作用,其产生的辐射电磁场可等效为1个辐射阻尼Rrad,将部分机械能转换为辐射的电磁能。由此建立旋转磁源的机械运动方程为:
Tem=JdΩ/dt+RΩΩ+RradΩ
(1)
式中,Ω为旋转角频率且有Ω=ωN。
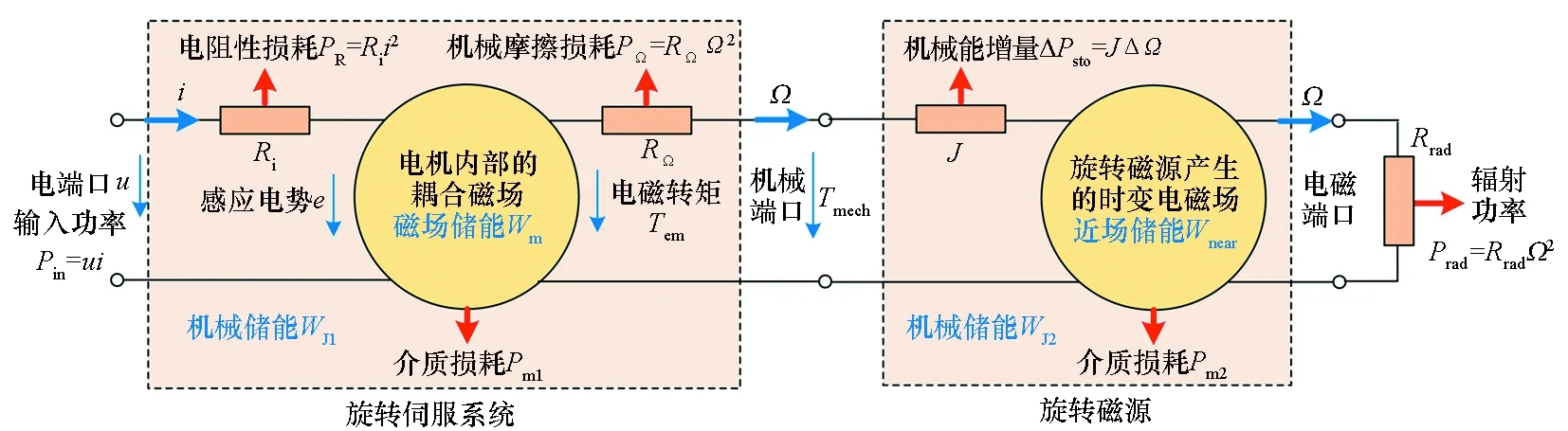
图5 RMBMA的系统模型及能量转换示意Fig.5 System model of RMBMA and schematic diagram of energy conversion
进一步由图5可知,PMSM输出机械功率Pmech=TmechΩ=Pin-PR-Pm1-PΩ=ΔPsto+Pm2+Prad。其中,Pin为系统输入电功率、PR为系统电阻性损耗(包括电机铜耗、控制器和功率变换器损耗等)、Pm1为PMSM内部耦合电磁场的介质损耗(包括电机铁芯的涡流和迟滞损耗等)、PΩ为机械摩擦损耗、ΔPsto为磁源旋转的机械能增量、Pm2为磁源旋转产生时变电磁场的介质损耗、Prad为辐射功率。Wm和WJ1分别为PMSM内部磁场储能及其转子轴系的机械储能,Wnear和WJ2分别为旋转磁源产生时变电磁场的近场储能和机械储能。根据上述能量转换特性,可定义RMBMA的辐射效率ηrad为:
ηrad=Prad/Pin=Prad/(Prad+Ploss)=Rrad/(Rrad+Rloss)
(2)
式中,Ploss=PR+Pm1+PΩ+ΔPsto+Pm2为系统总功耗,Rloss为等效的机械和电阻尼。
2 旋转磁源的磁场分布与衰减特性
由于当前低频电磁通信基本采用磁接收技术,为分析RMBMA的辐射功率,需研究其产生的时变磁场的分布与衰减特性。
2.1 旋转磁源的物理模型
构建如图6所示的旋转磁源物理模型,假设永磁体长度为2l且两端磁化异种等量磁荷Qm,在无限大均匀介质中,围绕其中心O(即坐标系原点)在yz平面旋转,可等效为一个旋转磁偶极子,由N=1可得Ω=ω。由于旋转运动可分解为同平面内2个振动角频率为ω且空间相位相差π/2的简谐振动[26],其振动幅度为l,则磁偶极矩m可表示为:
(3)

2.2 磁场分布与衰减特性
根据辐射电磁理论,磁偶极矩m0在z轴围绕原点O简谐振动产生的时变磁场分量BM为:
(4)
式中,B0=-μ0γ3m0/(4π),μ0为真空中的磁导率,γ为介质中的波数。由旋转运动与2个正交简谐振动之间的转换映射关系可得,磁偶极矩m0在yz平面内围绕原点O旋转产生的时变磁场分量B′M为:
(5)
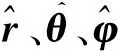
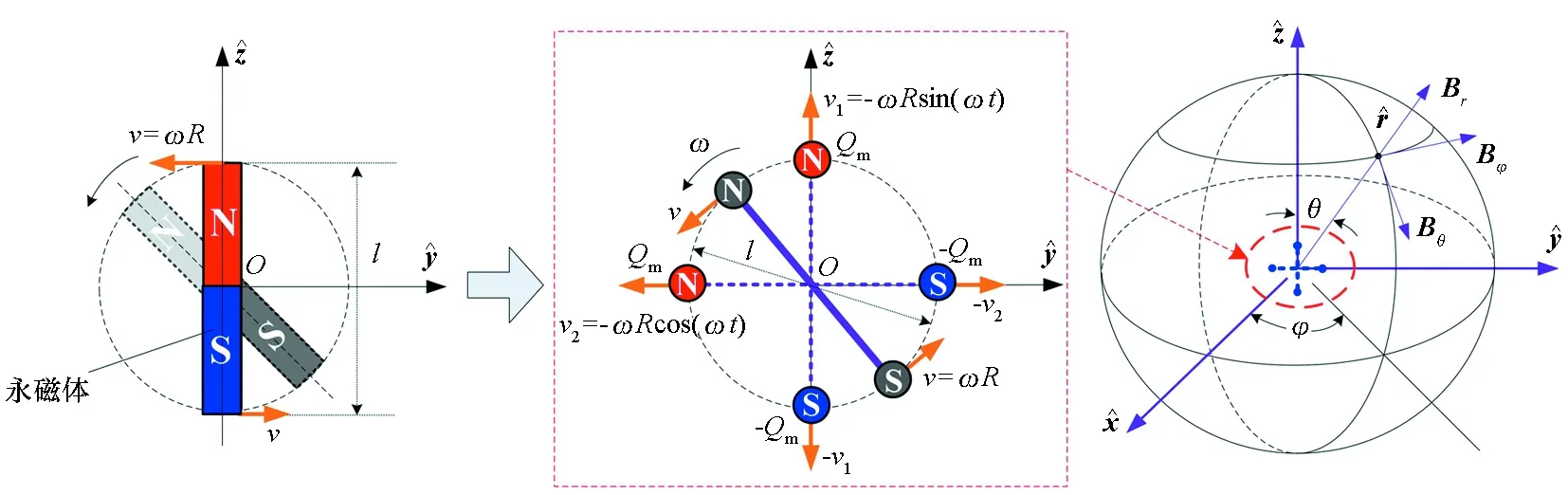
图6 旋转磁源的物理模型Fig.6 Physical model of rotating magnetic source
2.2.1 近区磁场分布与衰减特性
在近场区,γr≪1,由式(5)可得,其近区磁场分量B′M_near和电场分量E′M_near可表示为:
(6)
式中,波阻抗η0=μ0c。B′M_near同时存在r、θ和φ分量,其幅值正比于m0并随r的3次方衰减,且与近区电场分量相位相差π/2,因此该近区场为准恒定场,不向外辐射能量。
2.2.2 远区磁场分布与衰减特性
在远场区,γr≫1,由式(5)及辐射电场与磁场的对偶性可得,RMBMA的远区磁场分量B′M_far和电场分量E′M_far可表示为:
(7)
即B′M_far和E′M_far均为球面波且同时存在θ和φ分量,其幅值随1/r衰减且同相位,此时能量完全辐射。对于无损介质,由玻印廷矢量S可得辐射功率Prad为:
(8)
3 仿真分析
3.1 时变磁场的分布特性仿真
图7(a)和图7(b)分别给出了磁源在yz平面围绕原点O旋转时产生归一化时变磁场的近区场和远区场分布特性。其中,近区磁场的分布类似一个内凹的圆饼,其最小场强方向为旋转轴线方向,最大场强方向在旋转平面内过原点O的任意方向,最大方向近区磁场强度为最小方向的2倍;而远区磁场分布为一个标准的圆球体,呈全向分布特性。
(a) 近区磁场(a) Near magnetic field (b) 远区磁场 (b) Far magnetic field图7 RMBMA的磁场分布特性Fig.7 Distribution characteristic of magnetic field for RMBMA
3.2 时变磁场的衰减特性仿真与分析
图8给出了时变磁场在无限大均匀空气和海水中沿y轴方向衰减特性的仿真对比。其中m0=MrV,参考AMEBA项目指标[7],在仿真中,取Mr=1.1×106A/m,V=3000 cm3,则m0≈3.3×103A·m2;空气、海水的相对介质常数εr和导电率σ分别为1、81和0 S/m、4 S/m。设定n为1800 r/min、9000 r/min、18 000 r/min,对应发射频率为30 Hz、150 Hz、300 Hz,则在空气和海水中的波长分别约为107m、2×106m、106m和289 m、129 m、91 m。
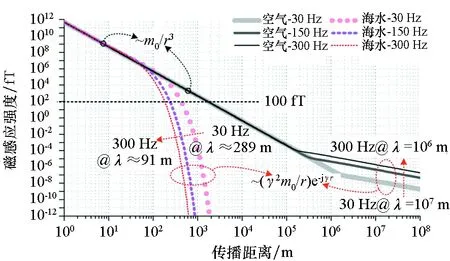
图8 RMBMA的磁场衰减特性仿真对比Fig.8 Simulated attenuation characteristic of magnetic field for RMBMA
由图8可知,在不同介质中,随着ω和r的增加,其近区磁场具有相同衰减速率,远区磁场则呈现不同的衰减特性。原因分析如下:
近区和远区磁场分别正比于(m0/r3)e-jγr和(γ2m0/r)e-jγr,对于均匀有损介质,γ=β-jα,α和β分别为衰减因子和相移因子,可表示为:
(9)
其中,μ和ε分别为介质的磁导率和介电常数。
对于近区磁场,由于γr≪1,e-jγr≈1,因此近区场强正比于m0/r3,即衰减速率为1/r3且与传播介质无关。对于远区磁场,由于空气(近似无损介质)的σ=0,可得α=0,β=k=ω/c,e-jγr=e-jβr≈1,因此远区场强正比于ω2m0/(c2r),即远区磁场衰减速率为1/r。而海水的σ≠0且[σ/(ωε)]2≫1,α2≈β2≈μσω/2,可得:
(10)
参考AMEBA项目指标[7],以100 fT作为接收场强要求,根据图8所示磁场衰减特性,RMBMA在空气中可实现约1.6 km距离内的近场通信,在海水中则可实现427 m~180 m(30 Hz~300 Hz)距离内的近场和远场通信。为扩展通信距离,一方面需提高磁接收天线的灵敏度;另一方面需增大V或Mr,即增大m0,但将相应增加旋转驱动功耗和工程实现难度。如要类似现有大功率岸基固定ELF和SLF台站,为实现数千千米以上的远场和波导场应用,则要求RMBMA的磁偶极矩增大数个量级,受限于永磁材料性能,则要求磁源的体积和重量增大数个量级,将给机械旋转驱动带来极大挑战。
3.3 信息加载的可行性仿真
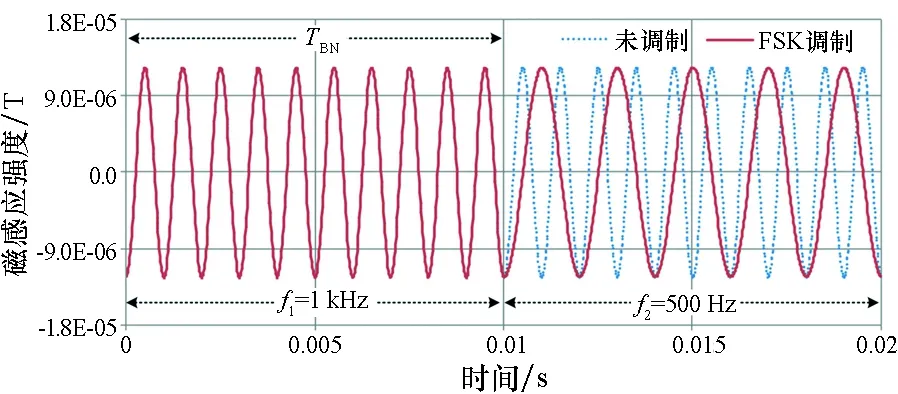
图9 基于平均转速控制的2FSK仿真示例Fig.9 Simulation of 2FSK with average speed control
4 原理样机研制与实验测试
本文研制的RMBMA原理样机如图10所示。其中,磁源采用平行充磁的NdFeB永磁体,且有N=1、V≈194 cm3、Mr≈9.55×105A/m,PMSM转速n为0~10 000 r/min,对应发射频率为0~166.7 Hz且连续可调。为测试近区磁场,将测试线圈分别沿x和y轴放置并改变其与磁源的距离,利用示波器获取测试线圈在不同方向上的感应电势U(Ur、Uθ、Uφ),再根据电磁感应理论得到近区磁场在x和y轴上对应磁场分量Br、Bθ和Bφ的时域波形。当测试线圈位于y轴且r=0.2 m、n=9000 r/min时,图10中给出了实测Ur的时域波形。
图11给出了实测Ur峰峰值随n的变化趋势。测试线圈的感应电势U=4.44fBN0S,其中B为通过线圈的磁场场强,N0和S分别为线圈的匝数和截面积,并有N0S≈0.63 m2。由于Ur∝n且n= 60f,可知Br为与n无关的恒定值。当n=7200 r/min且r=0.6 m时,图12(a)和图12(b)分别给出了实测近区磁场在x和y轴方向的衰减特性:x轴方向,Bθ≈Bφ∝1/r3且远大于Br;y轴方向,Br≈2Bθ∝1/r3且远大于Bφ。对比式(8)可知,实测近区磁场特性与理论分析基本一致。
采用2FSK调制进行信息加载测试,给定转速为n1=3600 r/min(f1=60 Hz)和n2=4200 r/min(f2=70 Hz)且分别持续5 s并周期交替。图13给出了y轴上r=0.6 m处实测Ur的频域波形。如图13(c)所示,其频谱主要包含f1、f2、50 Hz工频及其高次谐波。由于磁源惯性和PMSM的瞬态响应特性影响,如图14所示,其转速的阶跃响应存在延时振荡过程,即反映磁源对转速给定的动态跟随特性。对比图13(a)和图13(b)可知,该瞬态响应特性将引入额外噪声,并限制传输速率的提升。

图10 RMBMA原理样机及测试环境Fig.10 Prototype of RMBMA and testing environment
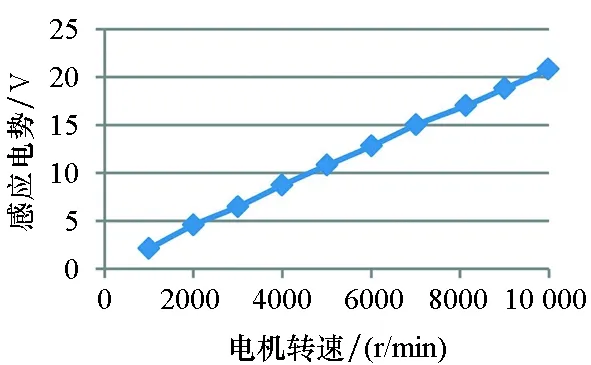
图11 实测Ur峰峰值随n的变化趋势Fig.11 Measured peak-to-peak value of Ur with different n
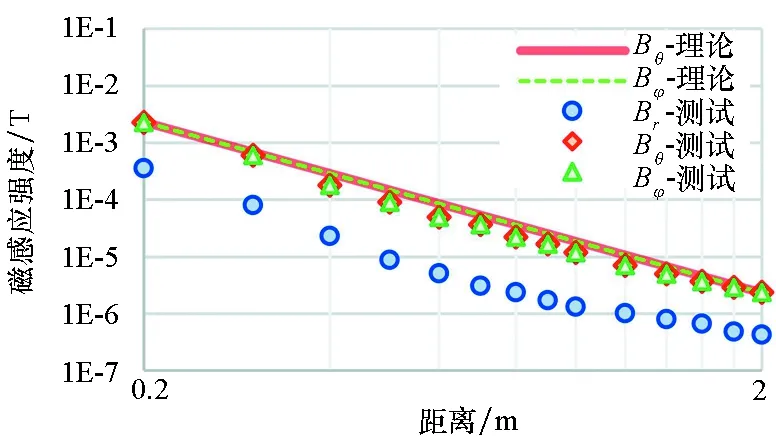
(a) x轴方向(a) Direction of x axis
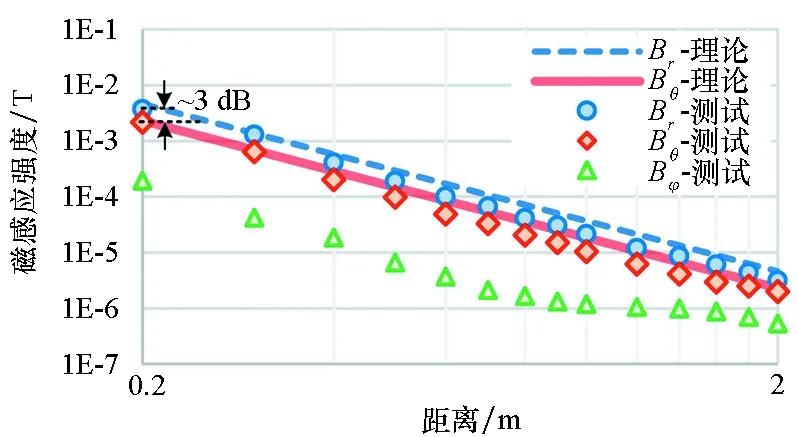
(b) y轴方向(b) Direction of y axis图12 实测RMBMA的近区磁场场强随r的变化趋势Fig.12 Measured magnetic induction intensity of near field for RMBMA with different r
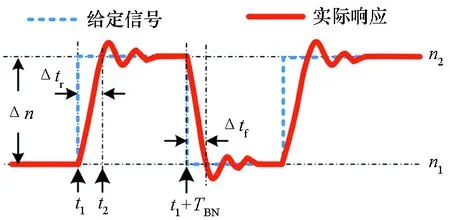
图14 磁源转速的阶跃响应示意Fig.14 Step response for magnet speed
5 结论
基于NdFeB永磁体和PMSM伺服驱动技术,提出了一种RMBMA技术方案,通过构建基于电-机械-电磁能量转换的系统模型,分析了旋转磁源在无限大均匀介质中产生时变磁场的分布与衰减特性,对RMBMA的辐射功率和辐射效率进行了初步研究,对近区磁场特性进行了测试验证。基于上述理论和仿真分析及实验测试,对其基本特性总结如下:
1)均匀介质中,RMBMA近区和远区磁场具有不同磁场分布特性。近区磁场分布近似一个内凹的圆饼,最小方向为旋转轴线方向,最大方向为旋转平面内过原点的任意方向;远区磁场分布为圆球体,呈全向分布特性。

3)基于对磁源转速的实时控制,RMBMA可实现对FSK和MSK等调制信号的信息加载,但转速变化时的瞬态响应特性将影响发射信号质量,并限制传输速率,具体影响机理与控制方法还有待进一步研究。
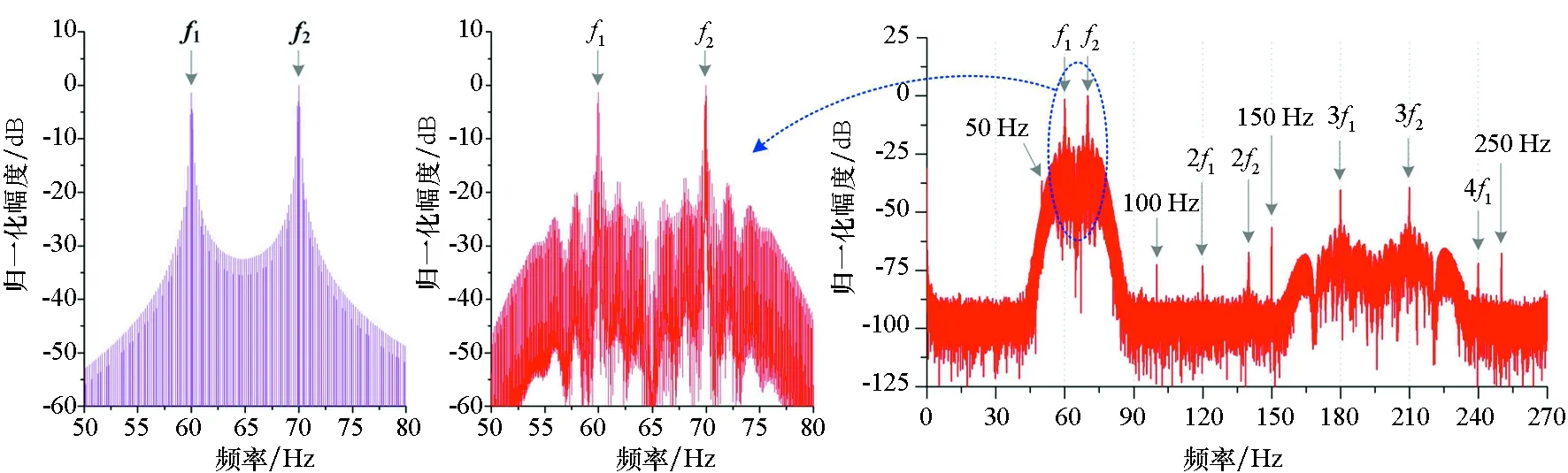
(a) 理想频谱(50~80 Hz)(a) Ideal spectrum(50~80 Hz) (b) 实测频谱(50~80 Hz)(b) Measured spectrum(50~80 Hz) (c) 实测频谱(DC~270 Hz)(c) Measured spectrum(DC~270 Hz)图13 理想及实测的2FSK信号频谱Fig.13 Measured and ideal spectrum for 2FSK signal
4)根据其磁场衰减特性,RMBMA可应用于数百米距离内的水下或地下通信,如利用V=3000 cm3、Mr=1.1×106A/m的NdFeB永磁体,在30 Hz~300 Hz的SLF频段和100 fT的接收场强条件下,可在海水中实现427 m~180 m距离内的近场或远场通信。在一定范围内,通过增大磁源体积,可进一步延长通信距离,但将相应增大驱动功耗。
5)受限于永磁材料和旋转驱动技术,当前RMBMA还难以实现类似现有ELF和SLF固定台站的远距离应用,但基于小型化和低功耗优势,可将ELF和SLF通信手段拓展到对体积重量和发射功率有限制的场合,在水下通信和对地、对海探测等领域具有广阔的应用前景。
当前,国内外关于RMBMA的研究都还处于起步阶段,特别是RMBMA涉及多学科交叉,其磁源与驱动系统存在电磁、热、应力等多物理场强耦合,急需在基础理论、高性能材料、结构设计、驱动控制以及机械工程方面取得创新与突破。
