一种波长调制干涉仪光强实时反馈控制系统
2020-07-10魏光宇卢庆杰王全召
魏光宇,卢庆杰,刘 薇,吴 鹏,韩 森,王全召
(1.上海理工大学 光电信息与计算机工程学院,上海 200093;2.苏州慧利仪器有限责任公司,江苏 苏州 215123;3.苏州维纳仪器有限责任公司,江苏 苏州 215123)
引 言
现代光学系统有着向大口径、高精度和高分辨率发展的趋势,为满足现代大型光学系统的高精度、高分辨率需求,大型光学元件的检测技术也日益提高。目前,光学元件质量主要采用相移干涉仪进行检测,在移相干涉技术中,较为普遍的是运用压电陶瓷移动参考平面来实现移相。但是,在干涉系统较大时,仅利用压电陶瓷推动很难保证参考镜能精确地沿着光轴移动,很容易造成因非直线运动导致的误差,从而影响大型光学元件的检测精度。
与传统的压电陶瓷相移干涉仪相比,波长调制干涉仪具有测量大口径光学透镜和减小仪器抖动的优点[1],因此它在光学检测、纳米薄膜检测中有着广泛的应用[2-6]。波长调制干涉仪是基于移相干涉测量技术,与传统的压电陶瓷移相法不同,波长调制干涉仪中的可调谐二极管激光器既作光源又作移项器[7]。然而,在波长调制过程中,可调谐二极管激光器的光功率也会发生变化,由此产生相位误差[8-10],最终导致干涉仪的测量精度降低。实际应用中,测量所需的干涉图通常是通过CCD摄像器件采集得到,在图像采集期间,不仅需要光学系统保持稳定,而且还要使光强稳定的速度足够快,这样才能不影响干涉图的采集。
本文针对以上问题,设计了一种波长调制干涉仪光强实时反馈控制系统,通过保持激光的光强,避免相位误差对测量结果的影响。该系统通过控制电信号来实现光强的控制,在工业检测中具有很强的实用性。
1 原 理
移相干涉测量技术的基本原理是,在两条相干光束之间引入等间隔相位差,当参考相位变化时,干涉条纹的位置也作相应的移动[11]。干涉场的光强分布可表示为

式中:x和y为空间坐标;为干涉场的直流光强;为干涉场的交流光强;为被测波面与参考波面的相位差;为两支干涉光路中的可变相位。由于式(1)中有三个未知量、和,所以重构未知波前相位需要至少三个干涉图光强的测量结果。图像间最常用的相移是,我们使用五步算法,此时式(1)中δi为

将其分别代入式(1),最终得到φ的值为


图1为波长调制干涉仪激光强度实时反馈控制系统。可调谐二极管激光器(TDL)通过TDL控制器实现波长调谐。通过分束器将光源按比例分成两束光,一束光作为光电探测器的输入信号,另一束作为干涉仪的输出。光电探测器可以把光信号转换成电信号,因其具有良好的线性度和200~1 000 nm的宽光谱范围,非常适用于测量可调谐二极管激光器的激光光强[13-14]。数据采集卡可以快速、准确地测量电压。通过数据采集卡获取光电探测器转换的电信号,通过我们编写的软件,对电信号与设定信号进行比较和补偿,输出稳定的电压。输出电压通过电压放大器放大,驱动电光调幅器。通过软件与光电探测器、数据采集卡、电压放大器、电光调幅器等共同作用,最终实现对激光强度的快速稳定控制。

图1 波长调制干涉仪光强实时反馈控制系统Fig. 1 Wavelength modulation interferometer laser intensity control system
准确测量激光强度的变化是稳定激光强度极为关键的一步。硅光电探测器具有良好的动态特性、线性度、稳定性,可以快速、准确地将光信号转换为电信号。图2为光电探测器的响应度与温度的关系图,由图可知,随着温度的升高光电探测器的响应度升高。在实验过程中,为了获得最佳结果,我们把测量环境的温度保持在24 ℃。图3为输出电流与输入光强的关系图,表明光电流在工作区间内与入射光强成线性关系。光电探测器响应度可以表示为

为方便处理调制激光强度的电信号以及提高响应速度,通过增加一个与电缆特征阻抗相匹配的负载电阻将电流转换成电压,转换式为

电光调制器响应速度快、结构简单,可以应用在激光光强调制。电光调制器具有电光效应,电光效应是指:在外加电场的作用下,某些晶体的折射率发生了变化,当光波通过此晶体时,光波的传输特性就因此受到影响而发生改变。
由两个铌酸锂晶体组成的电光调制器,具有良好的光学性能、高光电系数和电学性能。通过电光调制器的光强随驱动电压的线性变化呈正弦变化。其输出光强可以表示为
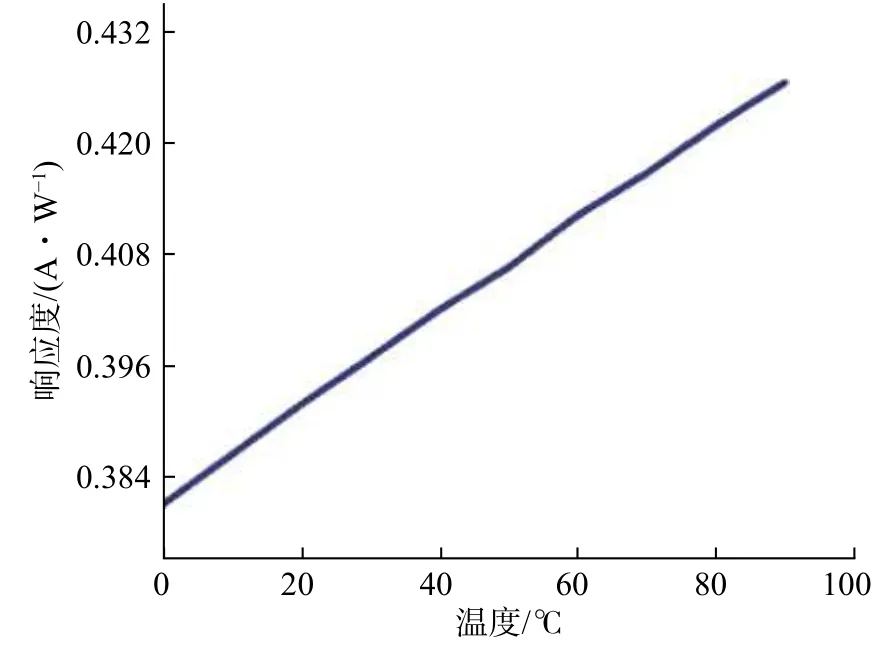
图2 光电探测器响应度与温度关系图Fig. 2 Photodetector responsiveness and temperature function
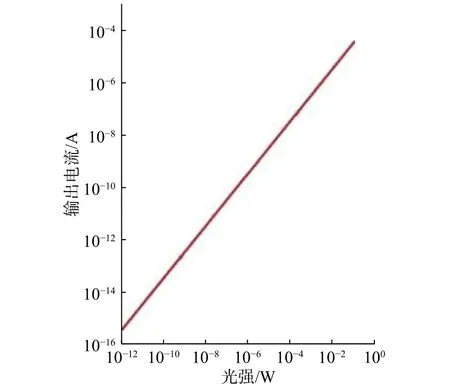
图3 输出电流与输入光强关系图Fig. 3 Output current and input light power function

数据采集卡可以实时采集电压信号。将采集的电压信号经过软件的比较和补偿后,由数据采集卡输出控制电压给电压放大器。图4为PID(比例积分微分)算法的电压处理框图,其中,PV为实时输入电压值,SV为设定值,设定值是根据稳定状态下的光强来设定的。PID处理电压的输入电压为调整后的电压,它是由PV与SV进行比较补偿得到的。经过误差补偿后,数据采集卡能够输出所需的控制电压。
以激光干涉仪为平台,将该系统放置于激光源后,激光源发出的激光经过该系统的控制补偿使光强快速稳定,输出的稳定光强作用于整个干涉仪系统,避免了波长调制干涉仪因光强不稳定导致的相位误差,使干涉仪的测量结果更加精确。
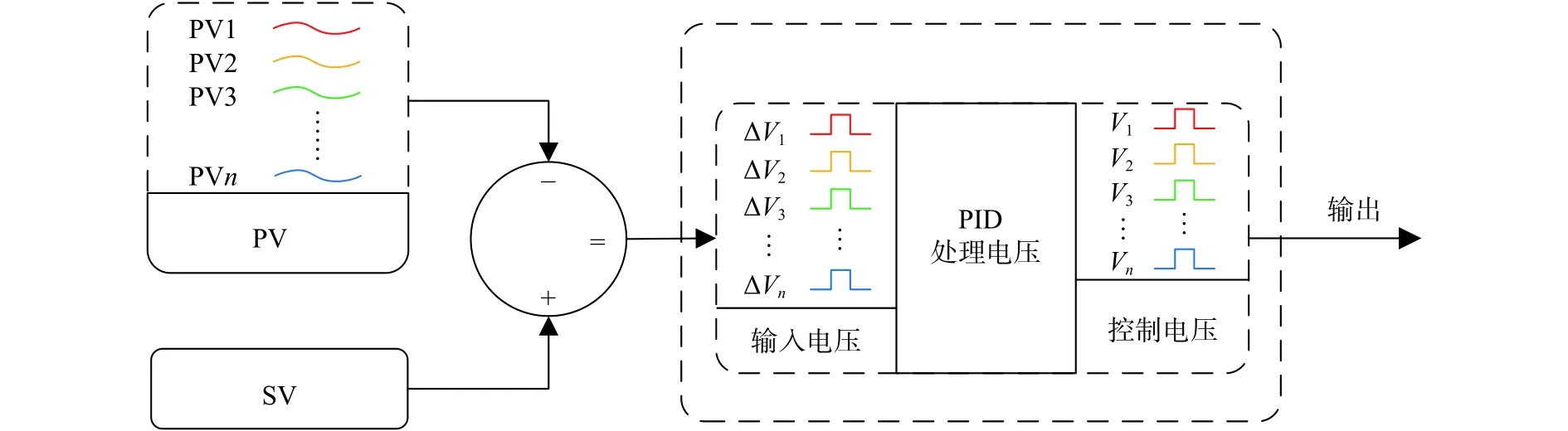
图4 电压处理框图Fig. 4 The voltage processing block diagram
2 实验结果和分析
本文实时闭环反馈控制系统适用于波长变化的相移干涉测量,可以有效检测激光强度并对误差信号进行校正。在实验过程中,为了获得最佳结果,我们把温度保持在24 ℃,采用630~640 nm波长的可调谐半导体激光器,其最大功率小于10-2W,以满足光电探测器的工作范围。分束器将输入光以9:1的比例分成透射偏振光和反射偏振光。透射偏振光与电光调制器对准,使其通过输入和输出孔径[15],并作为控制激光强度的反馈值。反射偏振光作为光电探测器检测的光信号,必须与光电探测器的测量孔对准,以便于对光信号作精确测量。根据测得的电信号,我们可以通过式(4)得到相应的光强。为保证光电探测器的精确测量,需要对其进行线性验证,在激光器稳定的情况下测量光电流,通过他们相互间的关系,来验证光电探测器的线性。采用LabVIEW程序创建数据采集卡的输入通道和输出通道,为保证系统的同步性,输入和输出同时使用每秒1 000个采样点的采样率。由光电探测器获取的光电流通过数据采集卡输入到LabVIEW并转换成电压值。将获取的电压值与设定值不断地进行比较并校正误差电压,在完成校正后输出控制电压。控制电压通过电压放大器放大,放大后的电压使用带有螺纹同轴连接器的电缆传送至电光调制器的输入端口,以驱动电光调幅器。放大器的带宽是600 kHz,适用于该系统。当激光波长发生变化时,该控制系统可以迅速作出反应,通过将产生变化的光信号转换为电压进行分析和处理,然后输出控制电压驱动电光调幅器。
图5为激光光强的初始强度与实验强度的对比。当波长调制干涉仪通过改变波长获得干涉图时,由实验可得到:未加入控制系统时,光强变化曲线如图5(a)所示,会产生如式(3)表述的相位误差,产生的相位误差在±0.032 5π弧度之间,可导致PV值的误差高达λ/50;加入控制系统时,激光强度保持稳定且稳定值为3.562 mW,如图图5(b)所示,由于激光强度始终稳定在3.562 mW,可以减小相位误差和峰谷误差。
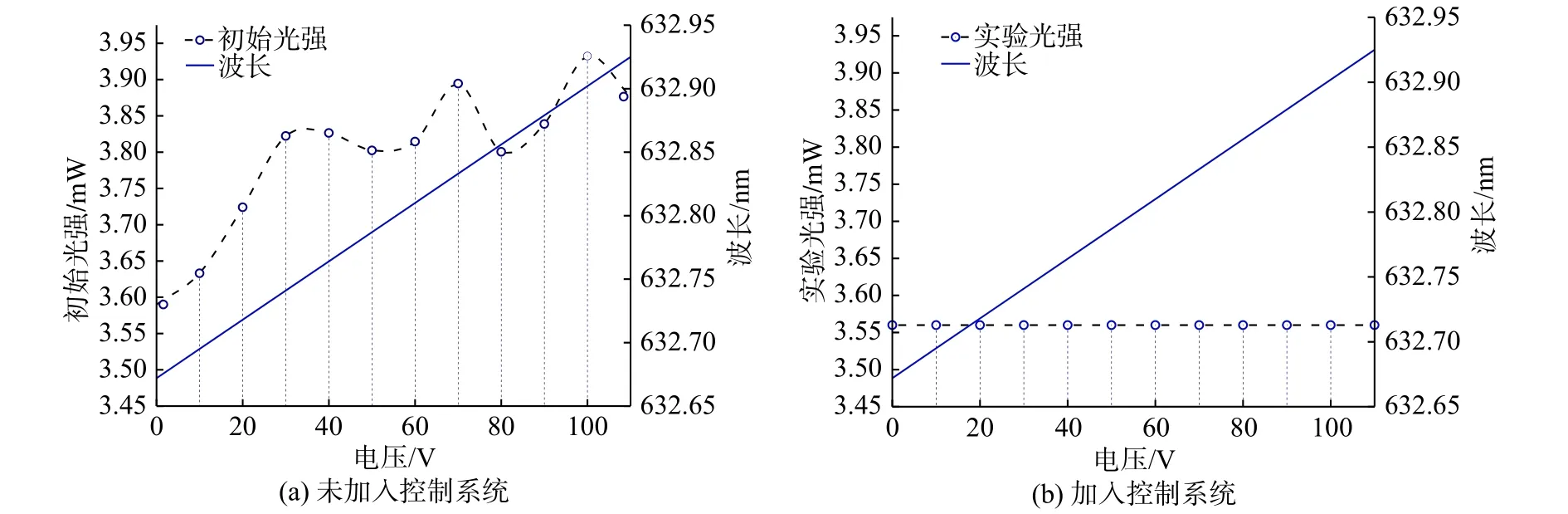
图5 波长调谐期间光强的初始强度和实验强度对比Fig. 5 Comparison of initial and experimental intensity of light intensity during wavelength tuning
因为干涉图的获取频率为30 Hz,实时反馈控制系统的响应速度需要足够快,才能不影响干涉图的获取。为了更直观地显示出该系统的响应速度,我们对系统的设定值进行更改。图6显示了设定值变化前后的系统光强变化情况。将光强的控制电压设定在0.65 V,此时光功率保持在3.562 mW左右。再将设定值改为0.60 V,此时光功率保持在3.536 mW左右。在设定值变化时,实时反馈控制系统的响应时间小于0.001 s,这一响应速度远超干涉图的获取速度,可避免因响应速度过慢造成的测量误差。
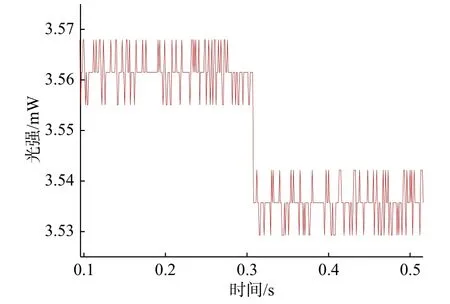
图6 设定值变化前后的测量光强度Fig. 6 Light intensity with the change of the setting values
在响应速度足够快的同时,还要保证激光光强的稳定性。理想的光强值分别为3.562 mW和3.536 mW,如图7所示。图7(a)为数据采集卡采集的电压信号,由式(4)可知,电压范围为0.067 01 ~0.069 59 V,对应的光强为3.556 ~3.568 mW(见图 7(b))。图 7(c)所示的电压范围为0.061 86 ~0.064 43 V,对应的光强为3.530 ~3.542 mW(见图7(d))。在实验过程中,考虑到光电探测器的暗电流和放大器的噪声会对测量结果产生一定的影响,我们认为控制系统的控制精度为±0.005 mW。
为了验证光强控制系统的有效性,将控制系统与波长调制干涉仪结合,对直径为100 mm的光学透镜进行测量。图8为干涉仪未加入控制系统的测量图与加入控制系统的测量图之间的比较。图8(a)为未加入控制系统的透镜表面测量图,它的PV值为140.168 9 nm,RMS值为24.731 8 nm;图8(b)为加入控制系统的透镜表面测量图,它的PV值为128.821 9 nm,RMS值为22.746 5 nm。PV表示光学表面最高点与最低点的差值,RMS表示表面差值的均方根。
实验结果表明,在波长调制干涉仪中加入我们的控制系统,PV值与RMS值分别减少了11.347 0 nm和1.985 3 nm,提高了干涉仪的测量精度。

图7 光电探测器的测量电压及相应光强Fig. 7 The measured voltage and corresponding optical power of the photodetector

图8 干涉仪加入控制系统前后的测量图对比Fig. 8 The measurement chart before and after the interferometer is added to the control system is compared.
3 结 论
本文提出了一种可以实时控制激光强度的控制系统,以保证波长调制干涉仪在波长调谐过程中激光强度的稳定,从而达到减小相位误差、提高干涉仪测量精度的目的。通过该控制系统,对光强进行测量并将光强转化成电信号,再通过软件的控制补偿,实现了激光强度稳定性的控制。该控制系统的响应时间小于0.001 s,控制精度为±0.005 mW,与干涉仪结合进行光学表面测量,可使PV的测量精度提高λ/50,RMS的测量精度提高λ/500,证实了该控制系统在实际应用中的有效性。
