基于PID的多电发动机磁轴承控制系统设计与验证
2020-07-09王严伟高毅军宋启波
王严伟,高毅军,宋启波
(中国航发四川燃气涡轮研究院,成都 610500)
0 引 言
多电发动机作为未来多电飞机的动力装置,是多电飞机的核心系统之一,对发展多电飞机具有决定性意义。多电发动机取消润滑油系统、传动系统和液压系统,集成简化机载电气系统,采用电磁轴承、电动泵、电驱动装置和灵巧智能传感器,简化了发动机结构,减小飞机迎风面积,提高供电能力来满足大功率定向能武器的需要,提高了发动机可靠性,降低了维护成本。
目前,发动机多电技术在航空发达国家得到快速发展,并在发动机上完成了验证。20世纪70年代,S2M公司首先为地面燃气涡轮发动机研制了主动磁轴承,NOVA公司在1985年开始将磁轴承应用于无润滑的压气机中,20世纪90年代美国和欧盟开始发展相应计划,在美国IHPTET计划中开展了发动机磁轴承技术验证[1]。
多电发动机是集成主动磁悬浮轴承、内置式起动发电机、全电气化传动附件、分布式数字控制系统等多电技术,实现无润滑系统和无机械传动的新型发动机。其中,主动磁悬浮轴承技术为多电发动机的重要关键技术之一。主动磁悬浮轴承是利用电磁力使轴承稳定悬浮起来,且轴心位置可以控制的一种新型轴承,其寿命是机械轴承的数十倍。为保证磁轴承可靠悬浮,磁轴承的主动电磁控制技术至关重要。本文以某小型单轴多电发动机为背景,重点阐述基于PID控制算法的磁轴承控制系统工程实现及在发动机整机中的运转实验验证情况。
1 多电发动机磁轴承系统概述
多电发动机为单转子涡喷发动机,其总体结构布局如图1所示。多电发动机转子为5自由度支撑结构,包括前径向磁轴承、后径向磁轴承和推力磁轴承,同时布置位移传感器检测磁轴承静子与转子之间的间隙,布置备用轴承防止磁轴承突然失控和非悬浮状态的支撑。

图1 多电发动机磁轴承布局示意
磁轴承系统包括电子控制器、位移传感器、功率放大器和磁轴承本体。其工作原理:位移传感器用于监视发动机转子的位置,并将信息实时传入电子控制器,电子控制器经过运算确定必要的PWM信号,并将PWM信号输入功率放大器,由其变换出磁轴承绕组电流,使发动机转子位于磁轴承几何中心。
2 磁轴承控制系统方案
多电发动机磁轴承控制系统由电子控制器、功率放大器、电涡流位移传感器等组成,系统原理如图2所示。发动机转子在5个自由度上的运行,由前径向磁轴承、后径向磁轴承和推力磁轴承提供承载力支撑发动机转子悬浮。现设定前径向、后径向和推力轴承的方向坐标轴5个自由度方向:X1,Y1,X2,Y2,Z,发动机转子稳定悬浮在中心,需设计5个控制回路分别控制X1,Y1,X2,Y2,Z5个方向。图2中电涡流位移传感器将发动机转子与磁轴承静子之间的间隙实时传给控制器,控制器根据控制算法对位移偏差进行运算,得到控制电流,电流控制算法得到PWM信号,10路PWM信号由驱动电路放大后送入功率放大器的H桥电路,控制功率管的开通与关断,从而在母线电压的作用下,在磁轴承绕组中产生控制电流,磁轴承进而产生对转子的支撑力。
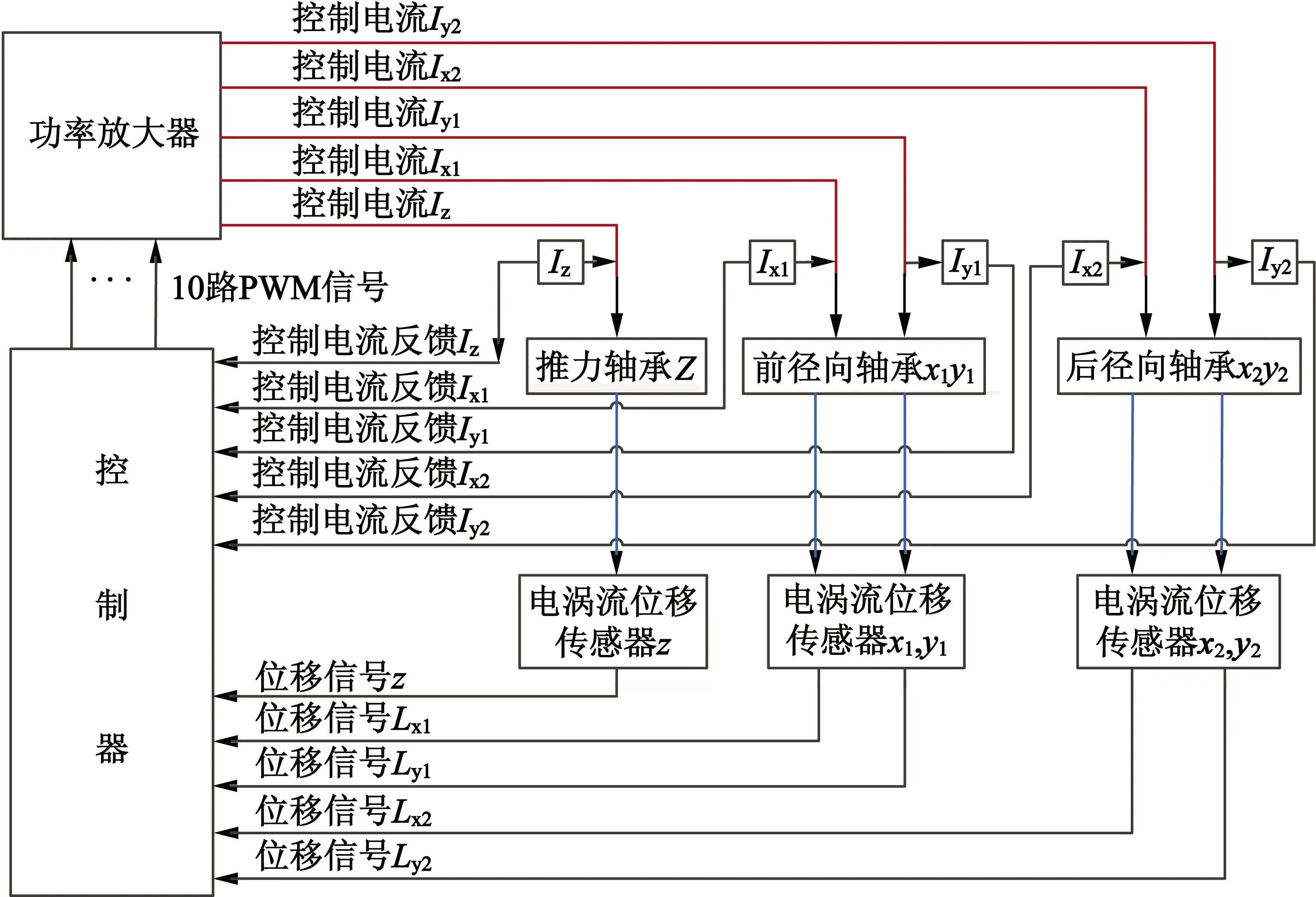
图2 磁轴承控制系统原理框图
2.1 硬件方案设计
根据磁轴承控制功能需求,形成了磁轴承控制系统的总体方案,如图3所示。硬件包括了DSP处理器单元、FPGA信号转换单元、驱动控制单元、信号采集单元、散热处理单元等。
DSP处理器:实现控制算法,信号采集处理,开关量处理,转速采集处理,软件下载升级,外部设备通讯;对输入位移和电流信号进行PID运算,输出PWM占空比信号,输送至功率放大器。FPGA转换信号单元实现DSP输出PWM信号输入变换,磁轴承绕组电流数据交互及PWM信号反馈比较等功能。驱动控制单元实现弱电信号与强电信号隔离,对PWM信号进行电流放大,输出电流至磁轴承绕组并反馈绕组电流至电子控制器。信号采集单元实现对磁轴承绕组电流和磁轴承间隙进行信号采集、调理等,并对监视功率器件温度信号进行采集。散热处理单元主要实现发热功率器件的散热,防止控制电路温度过高对CPU、FPGA 等核心机芯片造成损坏。

图3 磁轴承控制系统硬件框图
2.2 磁轴承PID控制算法及软件设计
磁轴承控制系统是典型双闭环控制系统,如见图4所示,其由内环电流环和外环位置环实现控制。一个闭环反馈控制系统一般由控制对象、控制器和检测等环节组成,控制器根据设定值与检测装置所检测的实际输出值之间按照某种算法或规律运算,运算所得的结果作为控制量作用于被控对象,从而控制被控对象的输出。

图4 磁轴承闭环控制系统原理图
根据PID算法原理,比例、积分、微分参数对磁轴承的刚度、阻尼均有影响。在软件设计中需增加PID参数约束,避免PID不合理的参数增加系统不稳定性。磁轴承结构为差动形式,控制策略同样采用差动式,磁轴承单个自由度PID差动控制结构如图5所示。通过采集磁轴承的上端Lx+、下端间隙Lx-,与给定间隙Lo相比较得到Lin+和Lin-,参与PID算法计算,得到控制电流的偏差±ΔI。将偏差电流±ΔI加上平衡电流Io,给定至PWM功率放大器,并且与反馈电流比较,计算并得到磁轴承绕组电流驱动磁轴承转子悬浮。
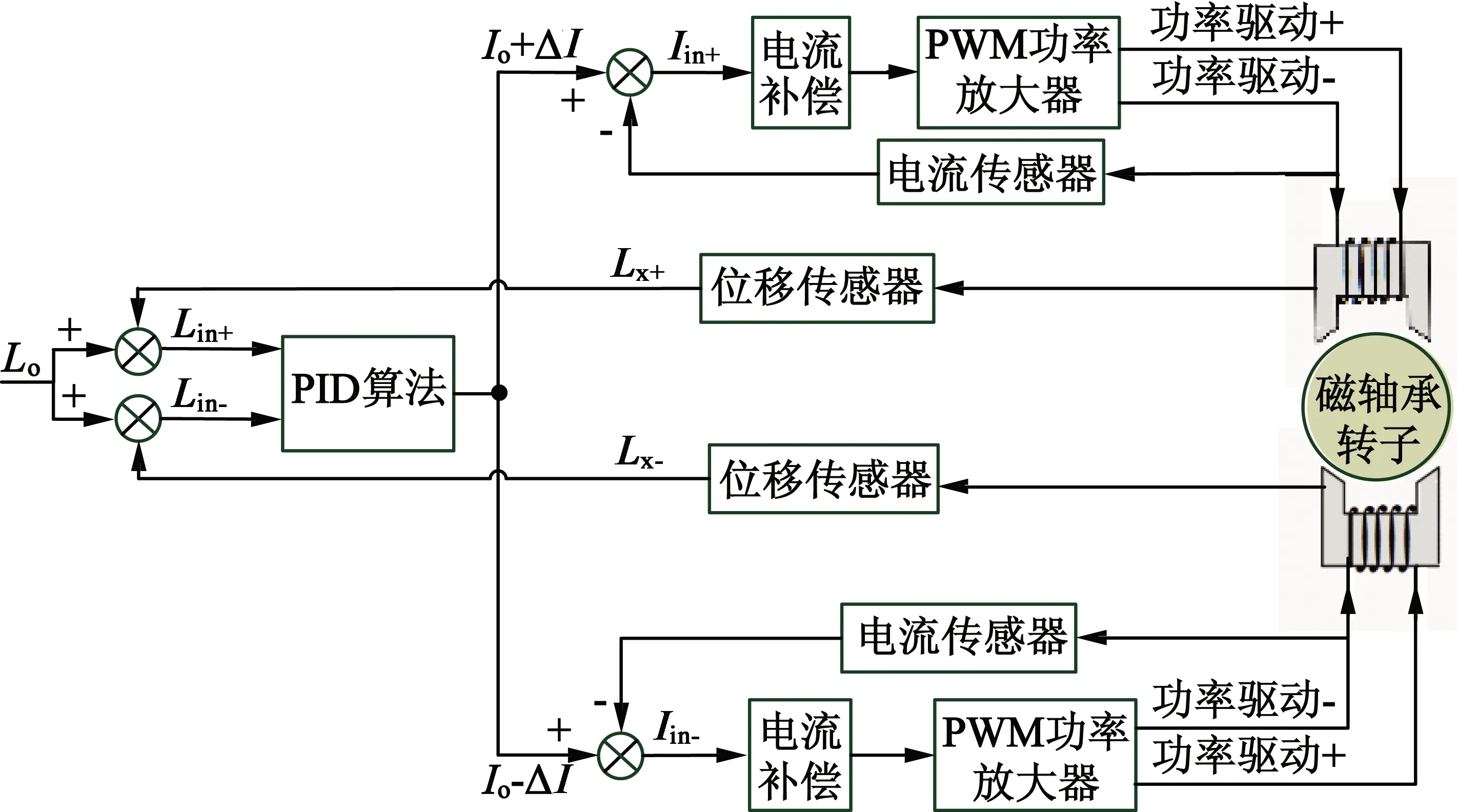
图5 单个自由度磁轴承PID差动控制结构图
航空发动机转子的5个自由度需采用5个图5的单自由度差动控制结构,同时考虑各个自由度的耦合关系,对每个自由度进行修正。
磁轴承控制系统PID算法中,微分参数设置不合理时会放大外界干扰噪声,导致控制系统的振荡。因此,在PID控制算法中增加一阶低通滤波器,能够有效消除高频干扰信号,增强控制系统鲁棒性,此控制器的传递函数:
(1)

对式(1)采用一阶差分离散化,可得PID环节总输出:
UN(k)=KpE(k)+KiE(k)+Ui(k-1)+
Kd1[E(k)-E(k-1)]+Kd2Ud(k-1)
(2)
控制器总输出:
Uend(k)=KL1UN(k)+KL2[UN(k)-UN(k-1)]+
KL3Uend(k-1)
(3)

磁悬浮PID运算程序流程图如图6所示。控制算法依靠控制软件实现,主程序通过调用子模块来协调各个子模块的关系。DSP上电后,首先进行初始化程序,完成之后调用PID控制参数初始化模块,之后打开中断使能定时器进行PID和相位补偿控制算法。
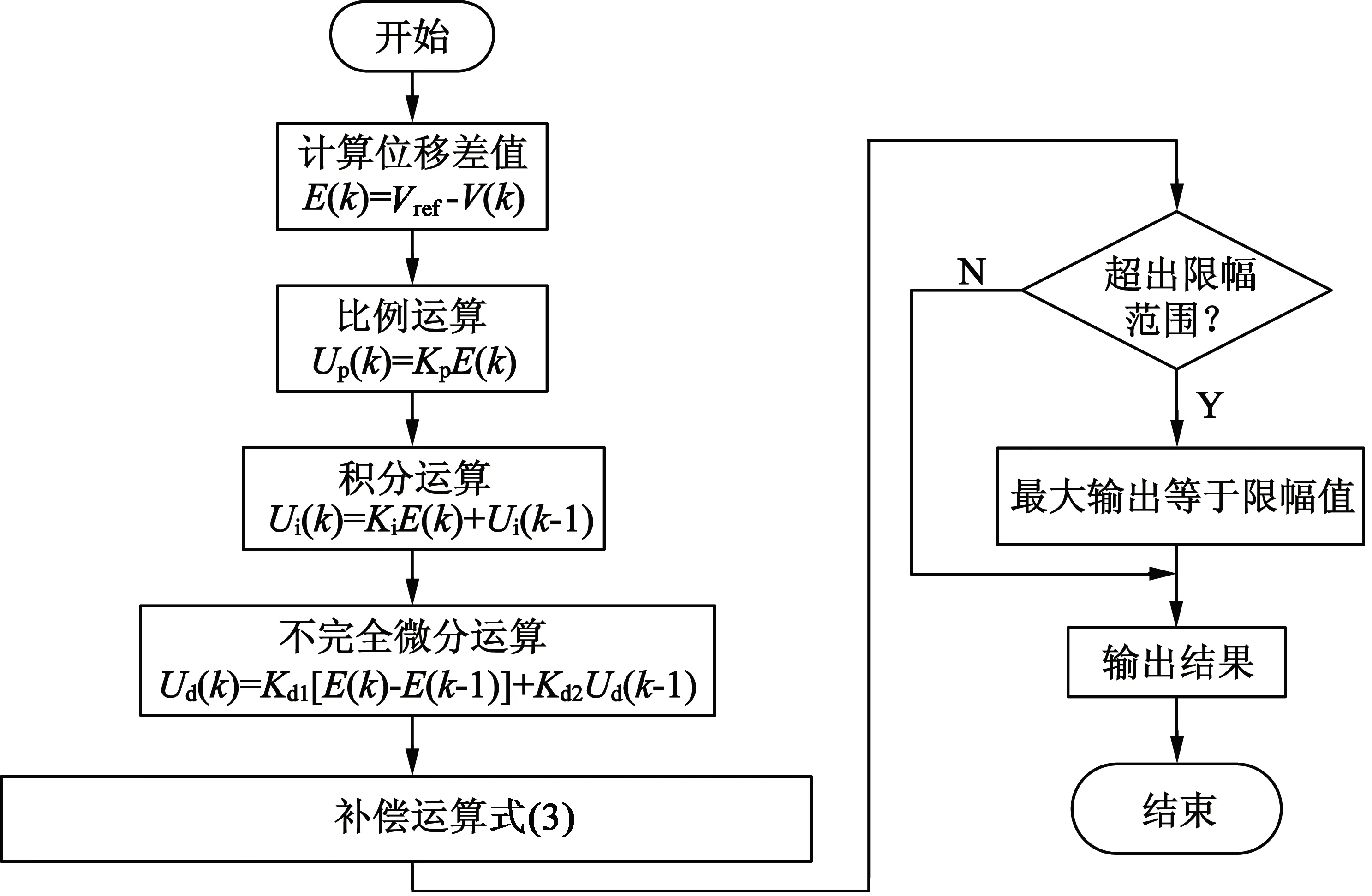
图6 磁轴承PID运算程序流程图
3 实验验证
多电整机开展了磁轴承控制技术验证实验,随发动机开展了运转实验,最高转速至9 000 r/min,磁轴承运行稳定。选取发动机转速为6 000 r/min和9 000 r/min的磁轴承控制状态图谱,如图7~图10所示,数据如表1和表2所示。实验数据表明,磁轴承的位移未超出偏移范围,磁轴承绕组控制电流未出现异常。
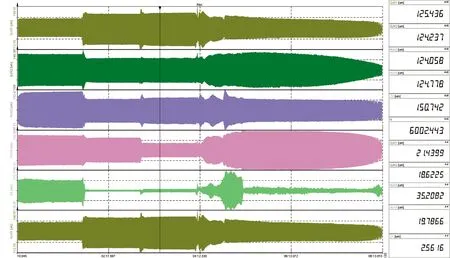
图7 6 000 r/min磁轴承的位移图谱

图8 6 000 r/min磁轴承各路绕组控制图谱
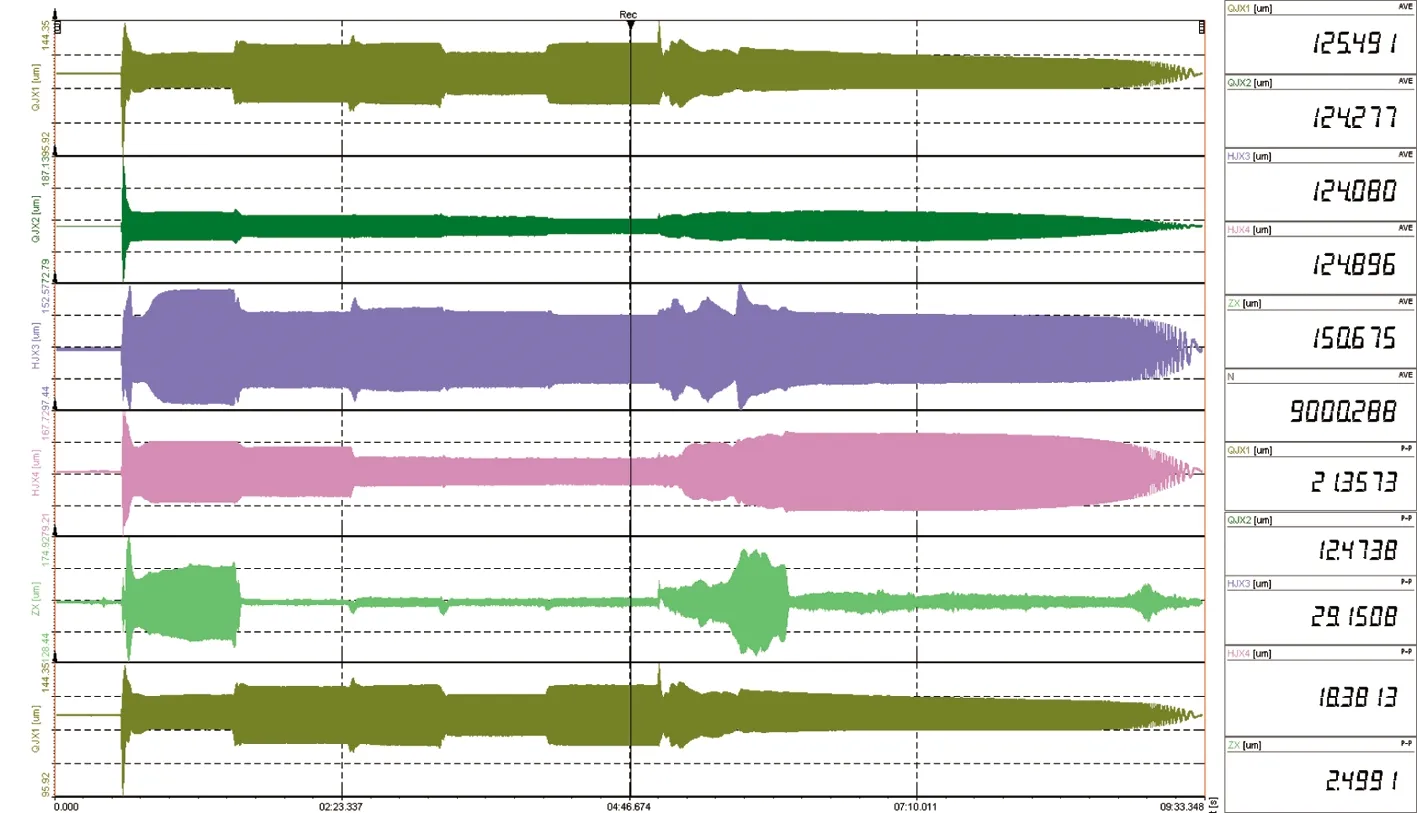
图9 9 000 r/min磁轴承的位移图谱

图10 9 000 r/min磁轴承绕组控制控制图
表1 6 000 r/min时磁轴承的位移数据
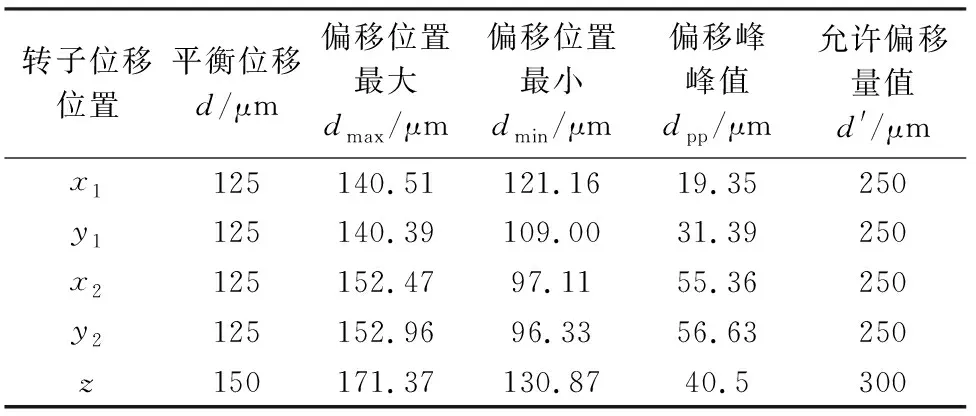
转子位移位置平衡位移d/μm偏移位置最大dmax/μm偏移位置最小dmin/μm偏移峰峰值dpp/μm允许偏移量值d'/μmx1125140.51121.1619.35250y1125140.39109.0031.39250x2125152.4797.1155.36250y2125152.9696.3356.63250z150171.37130.8740.5300
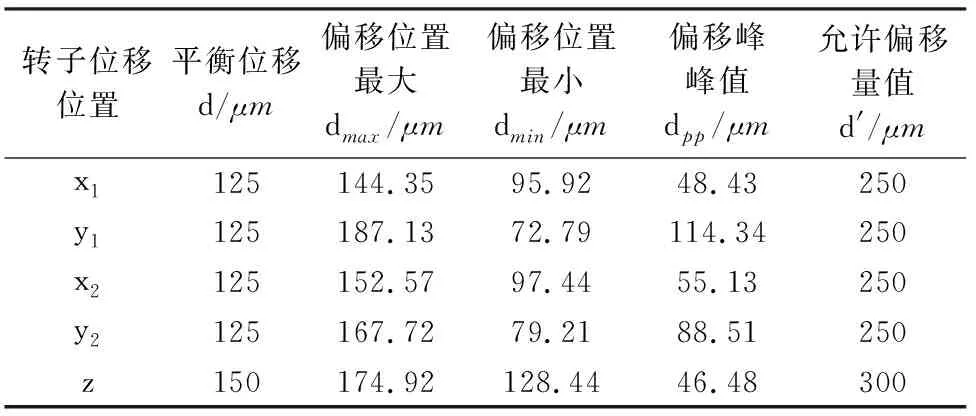
表2 9 000 r/min时磁轴承的位移数据
4 结 语
本文介绍了多电发动机磁轴承控制系统架构、原理,开展了建模与仿真,设计了PID算法,实现了模拟发动机转子的五自由度控制,最高运行转速30 000 r/min;实现了多电发动机在实验台架稳定运行。在整个多电发动机运转过程中磁轴承稳定运行,磁轴承控制系统工作性能达到了预期效果,验证了多电发动机技术磁轴承控制的可行性,本文对多电发动机磁轴承控制研究具有较好的借鉴价值。
