自然能驱动无人艇融合TD滤波的无模型自适应航速控制方法
2020-07-09姜权权廖煜雷苗玉刚
姜权权,李 可,廖煜雷,贾 琪,李 晔,苗玉刚
(哈尔滨工程大学水下机器人技术重点实验室,哈尔滨150001)
1 引 言
无人水面艇(Unmanned Surface Vehicle,USV)属于具备不同自主运行能力的一类无人驾驶水面舰艇。USV 具有机动灵活、无人操控、运维成本低等优点,主要用于有人舰船难以实施、相对危险、效能低的任务,已在海洋科学、海洋工程及海洋安全领域展现出良好的应用潜力[1-5]。目前,常规无人艇的动力来源主要为电池或柴油推进,受自身搭载能力的限制,无人艇的续航时间一般为几小时至几十小时。当需要连续数天甚至数月不间断地执行任务时,常规无人艇则无法满足作业要求。
为了提高无人艇的续航力,哈尔滨工程大学研制了一种利用光伏能、波浪能及风能复合驱动的驭浪者号自然能驱动无人艇(Natural-energy-driven Unmanned Surface Vehicle,NSV)原理样机。驭浪者号NSV甲板上铺设有光伏电池板,同时搭载有风力发电机。光伏电池板、风力发电机可以分别将太阳能、风能转化为电能,为推进器及电气设备提供电力。同时,在船艏及船艉处部署了波浪驱动水翼(波浪推进器),水翼可以将波浪引起的船体摇荡运动转化为前进驱动力(波浪力),即驱动力包含了电力驱动(可控)、波浪驱动(随海况动态变化,时变不可控)两个部分。
相比于常规动力无人艇,由于驭浪者号NSV驱动力中存在波浪力这一不可控部分,导致其航速受波浪干扰影响大且航速控制子系统不完全可控,增加了航速控制难度。然而,无人艇良好的航速控制性能是执行各种任务的基础。目前,针对常规动力无人艇的航速控制方法,主要包括PID 控制、S面控制、滑模控制、反步法、模型预测控制、模糊控制、神经网络控制、动态矩阵控制以及自适应控制等[1-6]。
2007年,高双等[7]为解决喷水推进无人艇具有强非线性导致常规控制方法难以保证控制精度的问题,提出神经网络和模糊方法对喷水推进无人艇进行控制。仿真结果验证了算法能够有效控制喷水推进无人艇的航速。
2010年,朱齐丹等[8]针对喷水推进船舶航速航向控制的耦合问题,设计出一种具有鲁棒性和抗干扰的系统,结合反步法和滑模控制器保证航向控制的稳定性和抗干扰能力,并基于反步法设计航速控制器,完成对喷水推进船舶的航速航向控制。
2015年,曹诗杰等[9]针对USV 在未知干扰环境下自主运动控制问题,探索基于模糊自适应算法的航向、航速协调控制方法。开发以航向角偏差率为输入量、以控制周期为输出量的自适应控制器,使系统响应外部环境的变化。仿真结果表明在不同海面风、浪、流随机干扰的条件下,均能使无人艇抵达目标点,实现点对点的自主航行。
2016年,欧林渠[10]通过对高速滑行艇的航向和航速子系统进行解耦,分别设计了滑模控制器和模糊控制器,针对滑行艇航速控制问题,设计了多种模糊控制器。通过改进模糊控制器和传统PID 控制器的对比仿真试验,验证了改进模糊控制器能够提高滑行艇的航速响应速度,同时使得航速变化更加平稳,提高控制系统的鲁棒性。
2019年,谭西都[11]针对搜救型无人艇在抛筒前后,无人艇模型变化较大,航速难以精确建模的问题,提出了模糊PI航速控制器。仿真与实艇试验表明与常规的PI 航速控制器相比,模糊PI 控制器具有更快的航速跟踪速度,更强抑制扰动的性能。
2013年,Sonnenburg 等[12]将航速控制与艏向控制进行运动模型解耦,基于级联系统理论、非线性反步法和PID控制算法设计了航速/航向控制器。
在上述控制算法中,PID 控制算法得到了最广泛的应用。但是PID 算法的鲁棒性以及自适应性较弱,而无人艇容易受到模型摄动以及环境干扰力的影响,这使得利用某组不变的PID 控制参数很难使动态受控系统获得良好、一致的控制性能。基于无人艇数学模型的控制算法如反步法、自适应方法等,系统控制性能与数学模型的准确性密切相关,但实践中很难建立受控系统准确的数学模型,这就导致基于模型的控制算法很难保障不确定性影响下系统的鲁棒性及稳定性。
本文拟从数据驱动控制角度(“数据导向”的设计框架,如PID、无模型自适应控制、迭代学习控制等),不考虑无人艇数学模型,而是仅基于系统的输入输出(Input/Output,I/O)数据进行控制器设计。为解决不连续时间非线性系统问题,侯忠生等[13]提出名为无模型自适应控制的方法,这是一种利用数据驱动进行控制的方法,确保了控制器设计只需要系统的输入、输出数据,而无需依赖于具体的数学模型。现已广泛应用于冶金、化工、交通等技术领域[14],但在无人艇运动控制方面的应用还很少。
针对目前无人艇航速控制存在的问题,本文将紧格式无模型自适应控制(Compact Format Dynamic Liner Model Free Adaptive Control,CFDLMFAC)算法应用于解决驭浪者号NSV 的航速控制问题;同时,针对波浪干扰下航速存在变频振荡导致控制性能变差的问题,利用TD 滤波器对航速数据进行滤波处理,提高航速响应的平稳性,进而改善控制器输出振荡的问题;最后,开展了仿真对比试验研究,以检验本文所提方法的有效性。
2 紧格式动态线性化无模型自适应控制方法
一般单输入单输出(Single Input and Single Output,SISO)离散时间非线性系统(1),可用式(1)表示:
其中,y(k) ∈R,u(k) ∈R 分别表示在k时刻的系统输入和输出,ny,nu是两个未知整数以表示系统的阶数。显然,USV的航速子系统可用式(1)来表示。
对系统(1)提出如下假设[14]:
假设1:除有限时刻点外,f(…)关于第(ny+2)个变量的偏导数存在且连续。
假设2:除有限时刻点外,系统(1)满足广义Lipschitz 条件,即对任意k1≠k2,k2,k2≥0 和u(k1)≠u(k2)有:

其中,y(ki+1)=f(y(ki),…,y(ki-ny),u(ki),…,u(ki-nu)) ,i=1,2;b>0是常数。
从物理角度出发,上述对控制对象的假设具有合理性。假设1 是对一般系统进行控制系统设计时的典型约束条件;假设2 是对系统输出变化率上界的限制,即输入能量变化有界,产生的输出能量变化也有界。显然无人艇满足上述假设。
引理1[14]:对满足假设1和假设2的非线性系统(1),当|Δu(k)|≠0 时,一定存在一个被称为是“伪偏导数”的时变参数φc(k) ∈R,使得系统(1)可转化为CFDL数据模型:

并且,φc(k)在任意时刻k有界;其中:

CFDL-MFAC算法[14]描述如式(5):


其中,μ>0,λ>0,ρ∈(0,1],η∈(0,1];ε为一个充分小的正数,φc(k)为伪偏导数,(k)为伪偏导数估计值,(1)为(k)的初值;式(5)为控制算法;式(6)为伪偏导数估计算法;式(7)为伪偏导数的重置方法。
CFDL-MFAC 算法仅利用系统量测的在线I/O数据进行控制器设计,不显含或隐含任何关于受控系统动态模型的信息,由于伪偏导数φc(k)对系统的时变参数、结构、相位甚至滞后均不敏感,因此CFDL-MFAC算法具有较强的鲁棒性和自适应性。
3 自然能驱动无人艇航速特性及控制方案设计
2017年以来,哈尔滨工程大学自主研制出驭浪者号NSV 实艇,如图1所示。在船艏及船艉处均搭载了波浪驱动水翼,在波浪持续激励下水翼将船体的摇荡运动转化为前进驱动力。显然,驭浪者号NSV 的驱动力由可控的电力驱动、随海况动态变化且不可控的波浪驱动力混合组成。由于波浪具有不确定、时变以及波动大等特性,导致驭浪者号NSV 在波浪中航行时,其航速存在变频振荡与不完全可控的特点。2019年,驭浪者号NSV开展了海上试验,纯波浪推进下航速响应,如图2所示。

图1 2019年驭浪者号NSV的波浪推进试验Fig.1 Wave propulsion experiment of Wave Rider NSV in 2019

图2 纯波浪推进时驭浪者号NSV的航速响应曲线Fig.2 Speed response curve of Wave Rider NSV under pure wave propulsion
海试中发现驭浪者号NSV 的航速数据存在变频振荡现象,并显著降低了控制系统的稳定性。为解决此问题,拟引入TD 滤波器对具有变频振荡特性的航速数据进行滤波,增强航速响应的平稳性,然后将滤波后的航速作为控制器输入,以改善控制器性能。带有TD 滤波器的CFDL-MFAC 算法工作原理如图3所示。
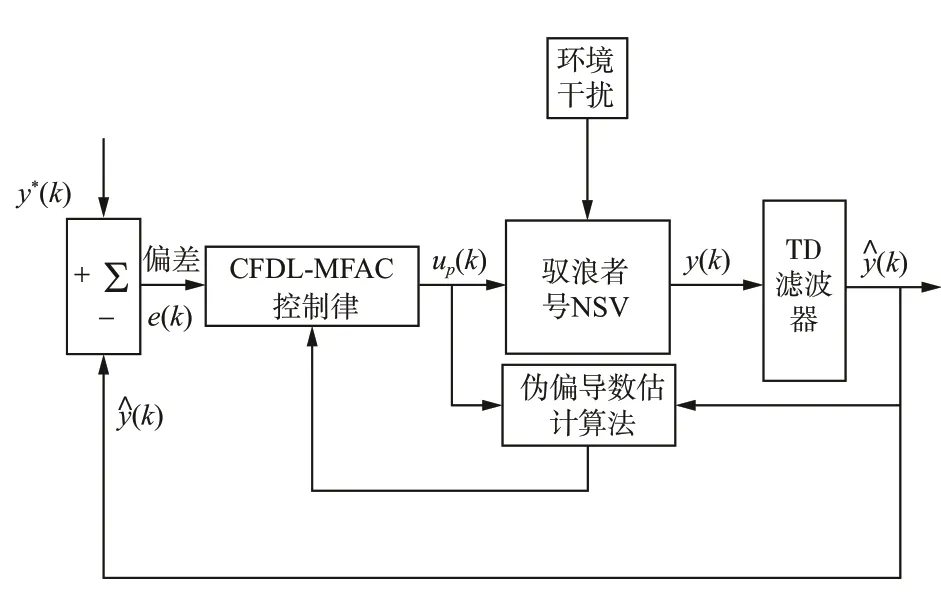
图3 CFDL-MFAC方案原理图Fig.3 CFDL-MFAC scheme block diagram
4 数值仿真试验
驭浪者号NSV,主要参数如表1所示。航速控制子系统的离散形式数学模型,可描述为:
其中,U(k)、U˙(k-1)、v(k)和r(k)分别为纵向速度、纵向加速度、横向速度以及艏向角速度;Ts为控制周期,τu(k)、τwave(k)分别为k时刻螺旋桨推力以及水翼推力;驭浪者号NSV 模型参数为:m11=710.56kg,m22=818.56kg,d11=41.48kg · m/s2。

表1 驭浪者号NSV主要参数Table 1 Wave Rider NSV main parameters
4.1 标称模型下仿真对比试验
假定驭浪者号NSV 不受任何外界环境力干扰。航速子系统的初始状态为[U0(0)]=[0 m/s 0 m/s20 m/s],设置期望航速Ud=1.0 m/s。为了算法对比的公平性,两种控制器参数均已经手动调到较优,其中CFDL-MFAC参数为λ=0.1,μ=100,η=1,ρ=1,PID 控制器参数为kp=5,ki=4.8,kd=0.5。两种控制器作用下航速控制的阶跃响应试验结果如图4所示。
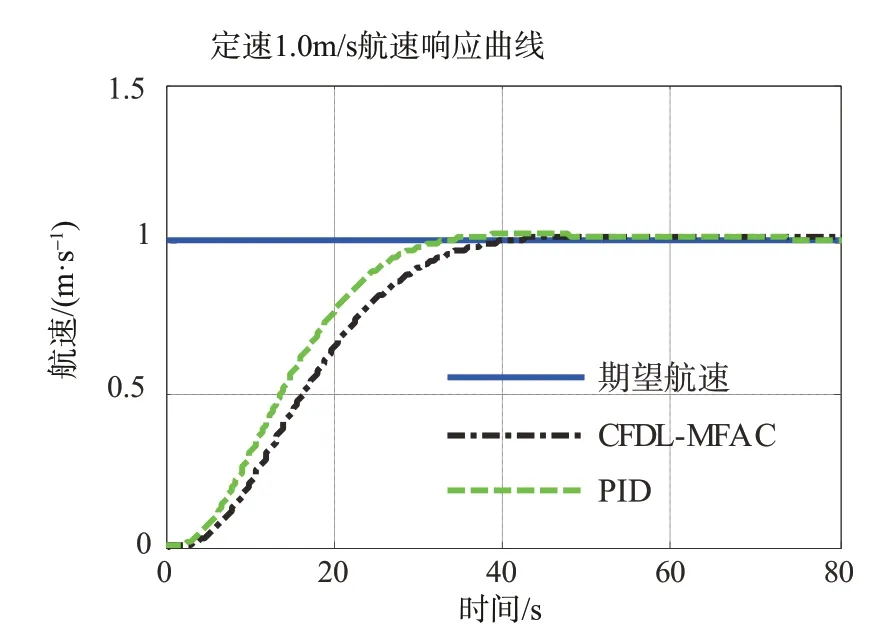
图4 标称模型下驭浪者号NSV的航速响应对比曲线Fig.4 Comparison curve of speed response of Wave Rider NSV under nominal model
由图4可知,不受外界环境干扰时,在PID 和CFDL-MFAC 两种算法作用下,实际航速均可接近无超调的达到期望航速,两种控制算法具有一致的控制性能。
4.2 波浪干扰下仿真对比试验
设定二级海况的典型波浪参数为:波长λ=8m,波高H=0.25m,浪向角ψ=180∘;设定航行速度为1m/s。利用CFD 软件对波浪驱动水翼产生的推力进行数值预报,水翼推力响应曲线,如图5所示。
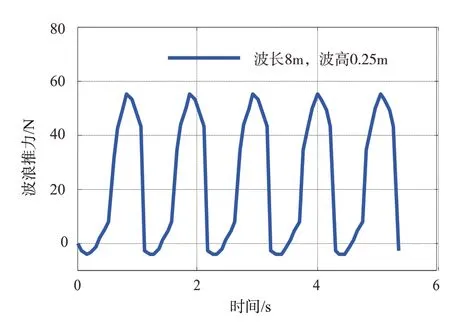
图5 二级海况下驭浪者号NSV水翼推力响应曲线Fig.5 Thrust response curve of the Wave Rider NSV hydrofoil under the second sea condition
依据图5,取τwave(t)=30+30 × sin(4 ×t-)作为二级海况下驭浪者号NSV 水翼产生的推力近似值,以简化分析,并进行二级海况干扰下的航速控制仿真试验。初始状态、控制参数与4.1 节保持一致,仿真试验结果,如图6-图9所示。

图6 二级海况下驭浪者号NSV的航速响应曲线Fig.6 Speed response curve of Wave Rider NSV under the second sea condition
由图6可知,当存在波浪干扰时,在PID算法作用下,无人艇航速存在明显的超调与振荡现象,航速收敛时间约83s、跟综误差的RMS 值为0.12m/s,航速的收敛时间显著延长、性能明显恶化。而在CFDL-MFAC算法作用下,存在较小超调,且几乎无振荡现象,航速收敛时间约48s、跟综误差的RMS值为0.05m/s。对比PID 算法,CFDL-MFAC 算法具有更强的抗干扰能力和鲁棒性。

图7 利用CFDL-MFAC算法滤波前后驭浪者号NSV航速对比曲线Fig.7 Speed comparison curve of Wave Rider NSV before and after filtering with CFDL-MFAC algorithm

图8 利用CFDL-MFAC算法滤波前后驭浪者号NSV的推力响应对比曲线Fig.8 Thrust response comparison curve of Wave Rider NSV before and after filtering with CFDL-MFAC algorithm

图9 利用CFDL-MFAC算法滤波前后驭浪者号NSV的推力响应曲线局部放大图Fig.9 A partial enlarged view of the thrust response curve of the Wave Rider NSV before and after filtering with CFDLMFAC algorithm
由图7至图9可知,TD 滤波器可以对航速中的变频振荡信号进行有效过滤,平滑航速输入信号(图7),有效削弱推力输出信号(图8和图9)的振荡现象,即控制器输出变得平稳,从而提高了控制性能。
5 结束语
以驭浪者号NSV为研究对象,考虑NSV 的光伏能、波浪能及风能复合驱动模式,以及波浪力影响下航速子系统的控制特性,基于CFDL-MFAC算法、TD滤波方法研究了驭浪者号NSV的航速控制问题,并完了仿真对比试验,结论如下:
(1)在海洋波浪力的激励下,波浪驱动水翼产生的推力具有不确定、时变和波动大等特点,导致驭浪者号NSV在波浪中航行时,航速具有不完全可控、变频振荡的特性。
(2)利用TD 滤波器可以对航速中的变频振荡信号进行有效过滤,使得NSV 航速响应更加平滑,同时抑制控制器输出信号的振荡问题,从而改善控制系统的抗扰动能力。
(3)仿真对比试验表明,相比于PID 算法,CFDL-MFAC算法具有更强的鲁棒性以及自适应性。
