一种基于多尺度点状目标建模的检测算法
2020-07-08陈勤霞武文成艾斯卡尔艾木都拉
陈勤霞,武文成,艾斯卡尔·艾木都拉
(新疆大学信息科学与工程学院乌鲁木齐830046)
引 言
红外点状小目标的检测是红外搜索和跟踪系统的关键技术之一。红外目标检测系统会根据小目标和背景之间的差异来实现对目标检测,其工作过程为:首先将系统所接收的信号转变成为电信号,再利用小目标检测算法提取小目标,之后在显示器上显示目标的位置及状态。
点状小目标因自身弱和小的特点,使得它在复杂背景下,缺少有效的形状和纹理特征并呈点状,所以一直以来,复杂背景下的点状小目标的检测被视为有挑战性的难题。在过去的十几年,虽然点状小目标的研究[1-6]取得了很大的进步,但仍有许多要解决的问题。
迄今,已经有大量的检测方法被提出。这些方法可以分为两大类:跟踪前的检测[7-8](detection before tracking,DBT)与检测前的跟踪(tracking before detection,TBD)[9-10]。DBT不依赖先验知识,可以直接从图像序列中检测目标,然后依据目标运动的连续性与轨迹的一致性对小目标进行跟踪。DBT方法首先对点状图像序列的背景进行预处理之后,再判定图像中的任一像素是否为潜在的小目标,最后根据图像像素之间的相关性,对单帧检测结果进行判断并剔除虚假小目标,得到最终的小目标,这种检测方法的性能主要依赖于单帧检测的结果。与之相对的是TBD方法,它依赖先验知识,该类方法的基本原理是首先在单帧的点状图像中先判断有无目标,紧接着会跟踪所有可能的运动轨迹,最后计算小目标运动轨迹的后验概率密度。如果当某一个轨迹的后验概率密度高于设定门限时,就可把它定为一个目标运动轨迹。参考文献[11]和参考文献[12]中指出小目标的形状是个稀疏环。若忽略光学系统的像差影响,小目标在成像器件上的像会经过大气传输产生衍射,最后呈现出弥散的光斑。其中还有一些方法,如参考文献[13]中使用2-D高斯函数给小目标建模[14-15]。
作者提出了多尺度处理方法来增强了图像的细节信息,提高对小目标检测的准确性是有帮助的。点状小目标图像的多尺度建模算法解决了传统建模检测算法中由于小目标变弱而导致检测出错的问题。
1 基于多尺度的点状小目标建模的检测方法
使用多尺度建模算法(multi-scale modeling algorithm,MMA),不仅增强了图像的细节信息,而且同时将背景与可疑目标图像分离开。再对贴片图像进行重建,真实的目标当且仅当存在于重建后可疑目标图像中的一个,一旦获得组件之后,再确定哪个组件包含点状小目标。最后根进行阈值分割图片,得到真实的小目标精确检测。
1.1 基于多尺度的小目标增强算法
取尺度参量 βi(i=1,2,3)对小目标图像进行降采样,得到3个不同尺度的小目标图像 Ii(i=1,2,3),然后对这3幅图中的每一幅通过如下方法进行细节信息增强。其中 β1=1,β2=0.7,β3=0.2。
用不同的高斯核函数与I1做卷积运算:

式中,G1,G2,G3是标准差分别为 1,2,4的高斯核函数。
再和原图做减法,Di=I1-Bi(i=1,2,3),进而获得不同程度的细节信息:精细细节D1,中间细节D2,粗细节D3。然后通过下式得到细节信息D:

式中,权值 w1=0.5,w2=0.5,w3=0.25。精细细节在增强图像边缘灰度的同时,会导致图像出现灰度级饱和的问题。(2)式的引入避免了这个问题。
将D融合到原图中,从而得到加强原图信息,即I1*=I1+D,对I2,I3同理可得 I2*,I3*。
再将不同尺度的图像还原到和原图同样大小,再对其进行归一化处理。

式中,ff(x,y)为归一化之后的图像,也表示在像素点(x,y)处的灰度值。
1.2 基于MMA的点状小目标建模检测算法
把归一化之后的点状图像分成两部分fb(x,y)与fs(x,y):

式中,ff为归一化之后的图像,fb为归一化之后图像中的背景信息,fs为归一化图像中疑似目标的信息,(x,y)表示像素点位置。
根据参考文献[16]可知,背景信息可以看成低秩矩阵B。利用下式对背景信息建模,通过奇异值分解可得[12]:

式中,U与V是B矩阵的奇异值。
接下来将对疑似目标点S进行高斯混合建模[17]。
根据马尔科夫链的性质[18],一个像素点受周围邻域像素的影响,如果有一个像素属于目标的话,它周围的像素也属于目标。同样有一个像素点是可疑目标的,那么这个点周围的像素点也属于可疑目标。根据这个性质,可以将可疑目标分量从背景中分割出来,公式如下:

式中,F表示(3)式得到的图像对应的矩阵向量。
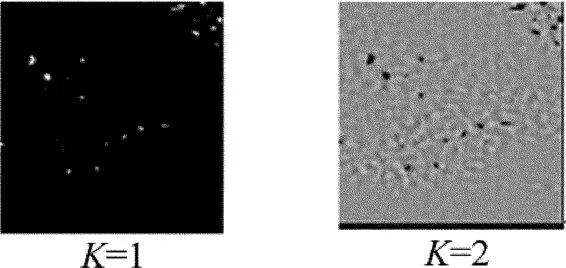
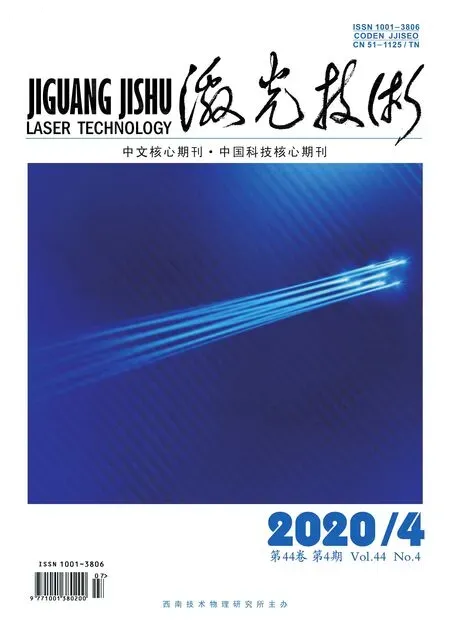
Fig.1 Components of the modeling parameter K=2
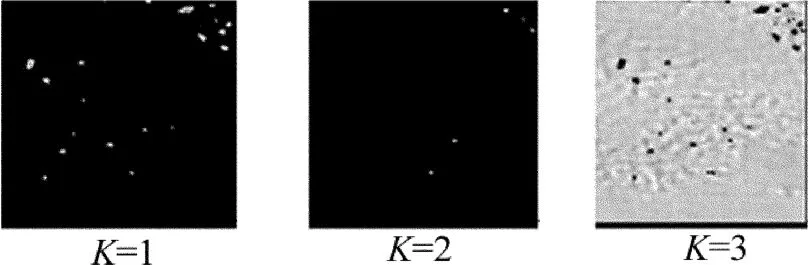
Fig.2 Components of the modeling parameter K=3

Fig.3 Components of the modeling parameter K=4
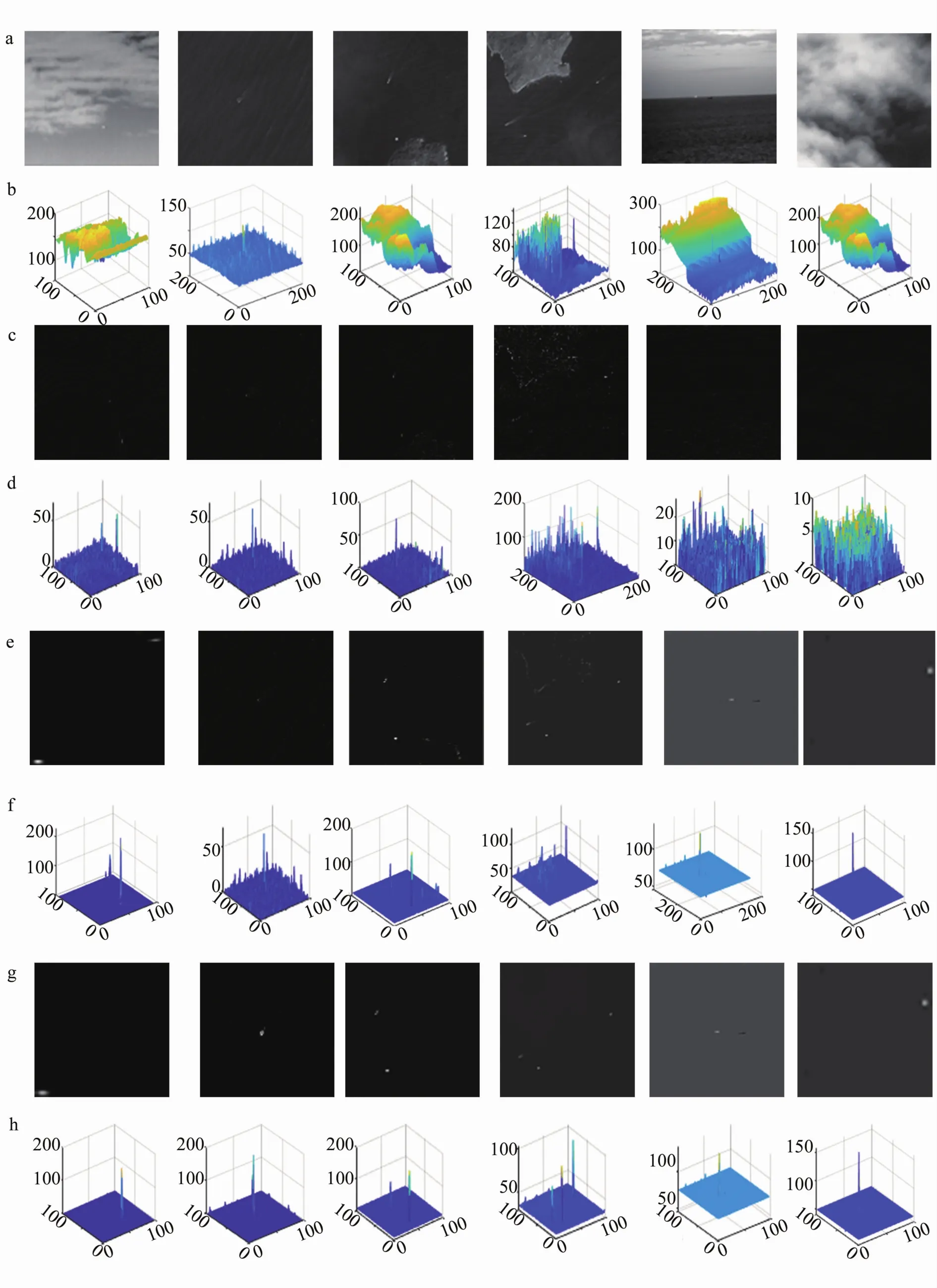
Fig.4 Experimental results of three algorithmsa,b—the infrared target images and their 3-D map,d—the detection results of the top-hat algorithm and their 3-D ma,f—the base method detection results and the corresponding 3-D map,h—the detection results of our algorithm and the corresponding 3-D maps,respectively
在MMA中,可疑目标组件的参量 K(K=1,2,3,…k…)是一个关键的参量。当获得K组件后,需要确定哪个组件包含点状小目标。通过实验发现,设置K=2时,分量中含有的非目标信息太多;设置 K=3时,效果比较好,且真实的目标存在于K=3中的一个;设置K=4时,出现了冗余分量K=4,所以本文中取 K=3,如图1、图2、图3所示。
空间分布的组件K是不同的,这是找出小目标的关键信息。选择重建,而不是直接选择小目标分量。根据参考文献[19]来确定小目标组件。
1.3 阈值分割得到真实的目标
在小规模的重建之后得到的小目标图像,其中仍含有一些残余非目标,为了得到小目标的位置,本文中首先采用边长为6个像素的窗口去遍历重建之后的小目标图像,得到一系列子图像区域。
若某图像块的最大灰度值为Lmax,则Mi是在子图像阵列中与平均灰度为M0的子图像块相邻的子图的平均灰度。
定义局部视觉[20]对比度为:

随后采用阈值分割算法得到目标图像块的视觉对比度T为:

式中,μ,σ代表的是小目标图片的均值和标准差,系数k取为0.1。如果子图像块的L>T,那么该子图像就是目标区域。
2 实验结果及分析
选了top-hat算法和基方法[19]作本文中算法的对比实验,如图4所示。图4为3种算法的实验结果。图4a和图4b为点状目标图像及其3-D图,图4c和图4d为top-hat算法的检测结果及其3-D图,图4e和图4f为基方法的检测结果及其3-D图,图4g和图4h为本文中的算法的检测结果及其3-D图。
本文中提出的算法在不同数据集的,实验结果相对较好,检测结果受到非目标点的影响较小,这有助于小目标的检测,表明该实验方法是比较有效的。

Table 1 Test data set
图5显示了表1中set 1测试数据集。如图5a所示,MMA算法下的实验效果更吻合真实的轨迹,图5b和图5c显示了不同方法下的水平误差和垂直误差,从图中可以看出,在MMA算法下的两种误差离误差值为0的欧氏距离最小,说明该方法更加有效。图5d所示的是受试者工作特征曲线(receiver operating characteristic,ROC)曲线,表达了算法的检测概率(detection probability,DP)与虚警概率(false alarm probability,FP)之间的相对关系。其中,ROC曲线越靠近纵轴,表明该算法的性能越好。由图5d可知,MMA对应的曲线更加靠近纵轴。
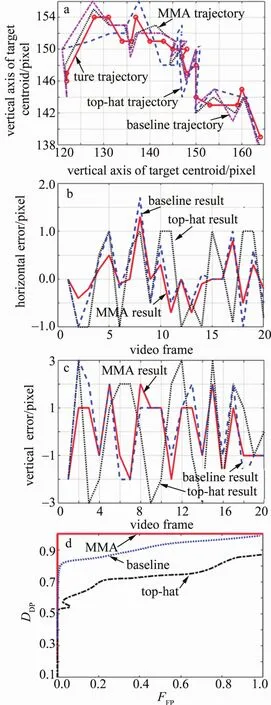
Fig.5 Small target trajectory mapa—horizontal erro—horizontal erro—vertical erro—receiver operating characteristic(ROC)

式中,DDP是检测概率,FFP是虚警概率,Nt表示在小目标中真实检测出的像素点个数;Nr表示小目标图像中小目标总的像素点个数;Nf把非目标检测成目标的像素点个数;Ne表示目标检测出非目标的像素点个数。
3 结 论
本文中方法在不同的测试数据集进行测试,均取得较好的效果,证明此方法具有较好的检测能力。该方法解决了传统的小目标图像建模中存在目标强度变弱的问题,实现对点状目标图像的细节信息增强。在下一步工作中,将结合检测算法对点状小目标进行实时跟踪。