复杂环境中电力线激光点云的自动提取
2020-07-08刘海燕丁高峰
吴 华,刘海燕,丁高峰,曹 飞
(1.华北电力大学控制与计算机工程学院,北京102206;2.北京中飞艾维航空科技有限公司,北京102600)
引 言
随着智能电网建设的大规模开展,输电通道高精度、自动化的空间结构分析需求逐年增加。输电线作为输电通道的主要设备,承担着输送电力的重要角色。输电线安全是电力系统稳定运行的重要保障[1]。但是电力线往往处于复杂的外部环境中,靠近电力线生长的树木、建筑等会对其安全构成潜在威胁[2-3]。因此,如何从复杂环境中高效、科学地提取出电力线,对于后续分析走廊设备的空间关系十分重要[4-7]。
目前,主流的电力线提取方法通常包括地物点剔除和单条电力线提取两步。
(1)剔除地物点的方法主要有:基于电力线分布对地有一定高差的特点,使用高程阈值分割算法剔除地物点[8],但该算法只适用于平坦的地形;为了适应地形起伏变化,SHEN等人提出了将长距离输电线路划分为多个小距离空间,再利用高程阈值分割算法分离地物点[9],该方法虽然解决了地形起伏的影响,但难以确定准确的高程阈值;YU等人利用不规则三角网加密(triangulated irregular network,TIN)的滤波方法先剔除地面点,然后采用基于角度的滤波方法剔除植被点[10],该方法能滤除大量高空中的植被点,但计算量较大且容易受到参量阈值的影响。
(2)对于单条电力线提取方法的研究,其中一种主流方法是根据电力线在xOy面的线性特征,使用Hough变换在2维空间提取电力线[10-15],该方法可以很好地分离同层且具有一定间距的电力线,但无法对垂直排列的多条电力线进行分割;另一种主流方法是使用监督分类的方法分离出电力线[16-19],其中McLAUGHLIN提出了使用局部仿射模型算法来提取电力线[16],该方法的初始模型非常重要,直接影响到提取精度;SOHN等人提出使用马尔可夫随机场分类器来分离电力线和建筑物[18],该方法需要大量的训练样本才能达到预期的效果,同时采样不均匀也会提高错误分类率。
基于以上问题,本文中在电力线空间分布特征的基础上,提出了一种适应复杂环境的电力线自动提取方法。首先,综合考虑地形起伏、干扰植被点的影响,以空间网格划分为基础,采用自顶向下的滤波方法剔除地物点,并利用密度描述子分离线塔点。其次,利用半径搜索法提取出单条电力线。最后,对涵盖不同地形及不同塔型的数据进行电力线提取实验,验证了本文中方法的有效性和准确性,总提取精度高达99.69%。
1 复杂环境中的线物塔分离方法
由机载激光雷达(light detection and ranging,LiDAR)扫描获得的输电走廊数据除了电力线点云数据外,还包含大量的地物点和电塔点,因此在提取电力线之前,要对原始点云数据进行预处理。本文中在考虑地形起伏变化以及地物点分布异常的复杂环境下,基于空间网格划分法,对网格采用自顶向下的方法分离地物点,并利用密度描述子分离电塔点,实现复杂环境下电力线提取的预处理。预处理流程如图1所示。
1.1 基于空间网格化的自顶向下地物点云分割
激光雷达扫描获取的数据中常见的地物点包括地面点、建筑物点、植被点等。对于地势起伏变化较大的输电线路,常常会出现低地势的电力点和高地势的地物点在高度上重叠的现象。但是若将长距离输电线路划分成多个空间网格,则每个网格近似于平坦地面的点云分布,于是可以对每个网格进行处理并有效解决地势起伏带来的问题。此外,由于地物点分布无序、杂乱,而高空中的电力点云受地物点影响较小。结合这些特点,本文中提出基于空间网格化的自顶向下方法来剔除地物点。具体实现方法如下。
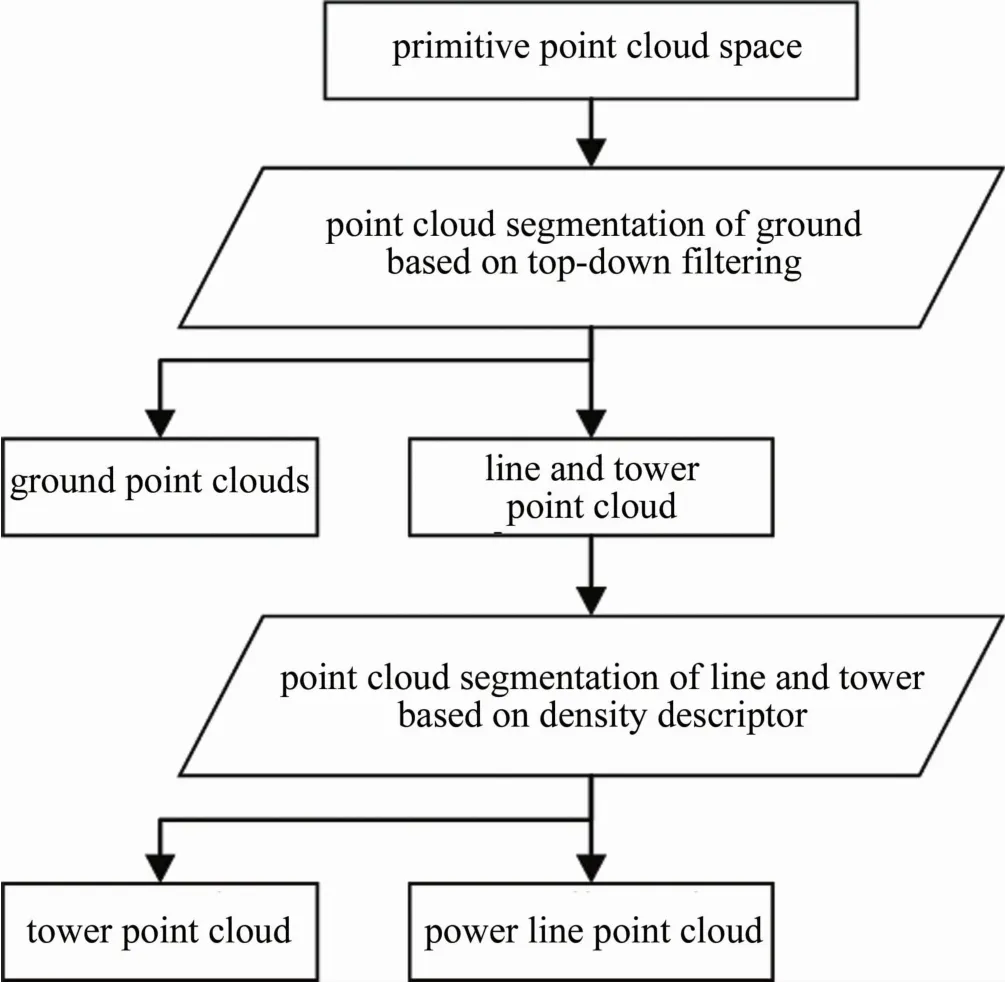
Fig.1 Flow chart of power line extraction
(1)利用主成分分析法[20]计算输电线路走向:建立点云数据的协方差矩阵,矩阵中最大特征值对应的特征向量就表示点云主方向,即输电线路走向,设其为x轴方向。
(2)空间网格划分:设置沿x轴的划分尺度为dx,将原始点云空间S0沿x轴划分为n个空间网格Si(i=1,2,3,…,n),其中 n和 Si定义为:
式中,maxx(S0)和 minx(S0)分别表示原始点云空间 S0在x轴上的最大和最小的x坐标值,px表示S0中任意点p的x轴坐标值,i表示沿着x轴划分的空间网格的序号,┌ ┐表示向上取整。
(3)单元格划分:沿着z轴以dz为划分尺度,将第i个空间网格沿 z轴划分为 mi(i=1,2,3,…,n)个单元格,表示为 Si,j(i=1,2,3,…,n;j=1,2,3,…,mi):

式中,maxz(Si)和 minz(Si)分别表示第 i个空间网格沿 z轴最大和最小的z坐标值,j表示沿着z轴划分的子空间的序号。原始点云空间网格划分过程如图2所示。

Fig.2 Spatial grid generation of original point clouds
(4)使用自顶向下搜索算法剔除地物点:对每个空间网格 Si(i=1,2,3,…,n)进行处理。由于输电走廊宽度与电塔横担宽度相近,因此通过不同塔型的大致宽度,设置横向电力线初始间距为d,结合地物点所在平面宽度陡然变化的特点,将地物点所在平面之上的最大和最小的y坐标值确定为边界值ymax和ymin,通过删除边界值之外的点云实现大量地物点的剔除;然后结合点云投影在xOz面电力线的条数nline,对处理后的空间网格自顶向下进行搜索,当搜索到的电力线条数等于输入的电力线条数nline时,对应搜索完成的高度k即为切割阈值,删除高度k以下的点云,实现电力线垂直距离下的地物点的剔除。最终完成对每个空间网格内地物点的剔除。具体算法过程如表1所示。

Table 1 Algorithms for eliminating object points in spatial grids
1.2 基于密度描述子的线塔点云分割
经上述算法处理后,仅保留下了线塔点云以及少量高空噪声点云,其中噪声点云通常为高空飞点,并不影响后续电力线的提取。为了实现多个杆塔间电力线的自动提取,接下来需将杆塔点云剔除。利用电塔点云密度大,相邻电力线点云密度较小的特点,通过点云密度统计法分割电塔,具体实现过程如下。
对剔除地物点后的空间网格 Si*(i=1,2,3,…,n)进行分割:沿着y轴以dy为划分尺度,沿y轴将空间网格分割为mi个单元格,每个单元格表示为Si,j*(i=1,2,3,…,n;j=1,2,3,…,mi):
式中,maxy(Si*)和miny(Si*)分别表示第i个空间网格沿y轴最大和最小的y坐标值。
具体划分过程如图3所示。fi,j表示第i个空间网格的第j个子网格中是否有点云。对于第i个空间网格,若单元格内有点云,fi,j=1,否则 fi,j=0,于是密度描述子δi表示为:
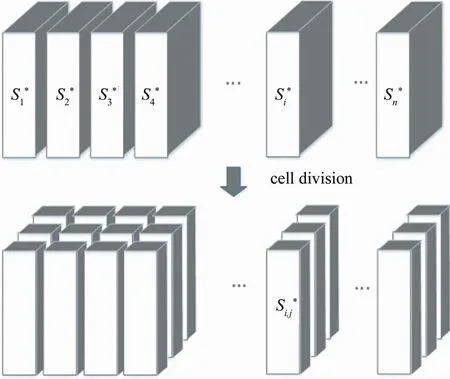
Fig.3 Cell division of point clouds

通过设定合适的密度描述子阈值即可完整地分割线塔点云,根据分割出的电塔点云所在位置,即可将多档点云数据划分为单档数据,以便于后续单条电力线的提取。经实验验证该方法可以简单有效地剔除电塔点云。
2 单条电力线提取
原始点云数据经过预处理后,保留下了电力线点云数据。根据输电线路设计的相关标准规范,无论是上下层分布的两层电力线之间还是同层分布的水平电力线之间,都存在一定的间隔宽度。根据这个特点,本文中提出通过半径搜索算法提取出单条电力线。
由于激光雷达扫描角度或物体对激光吸收程度的影响,导致获取的电力线点云数据可能存在稀疏的现象,这给垂直方向分离单根电力线带来了困难。此外,电力线具有一定大小的弧垂,即电力线的自重导致的自然下垂,在地势起伏的地方,单档距的电力线拥有最小和最大两个弧垂值,因此,传统依靠高程阈值分离电力线的方法在地形复杂的情况下表现逊色,且具体阈值难以确定。基于上述存在的问题,本文中提出了半径搜索算法来提取单条电力线,算法工作原理如下:(1)确定电力线点云数据T中x值最小的点作为初始搜索点p,并设置搜索半径r(通常小于上下线间距的2/3);(2)以搜索点 p为中心,r为球体半径搜索点云,将搜索到的点加入到集合Sc中,剩余点放到集合Rc中,判断每次是否搜索到新的点,如果搜索到,则更新搜索点p为Sc中x值最大的点;否则,沿着主方向将搜索点平移距离 r,生成新的搜索点 p;(3)若 maxx(T)-px<r,则完成一次搜索,提取出一条电力线点云数据,执行步骤(4);否则重复步骤(2);(4)若 Rc中无点云时,则停止所有搜索;否则在Rc中寻找x值最小的点作为再次搜索的初始搜索点p,重复步骤(2)和步骤(3)。
3 实验与分析
为了验证本文中所提方法在复杂环境下的可行性和鲁棒性,选取了不同复杂地形以及包含不同塔型的3组机载激光点云数据进行实验。数据1覆盖面积为1347.50m×280m,包含6221968个3维数据点,输电走廊所处地形凹凸不平,周围有大量植被干扰,连接电力线的杆塔塔型为羊角塔;数据2覆盖面积为1482.10m×261m,包含3288538个3维数据点,输电走廊所处地形陡然变化,高空中有噪声点干扰,连接电力线的杆塔塔型为酒杯塔;数据3覆盖面积为625.10m×826.50m,包含7752188个3维数据点,输电走廊所处地形平坦,电力线呈等腰三角形分布,连接电力线的杆塔塔型为猫头塔。
实验中涉及的参量主要包括dx,dy以及dz,其中dx主要基于杆塔厚度进行设置,通常为3m~6m;dy和dz是在考虑电力线水平及垂直间隔的基础上进行设置,通常小于线间距的1/2。本次实验中设置dx=4m,dy=dz=1m,从而沿着主方向将数据1划分为337个空间网格,数据2划分为374个空间网格,数据3划分为230个空间网格。
3.1 线物塔分割
在对原始点云数据进行空间网格划分的基础上,使用自顶向下滤波算法分割出地物点云数据和线塔点云数据,原始实验数据及分割结果如图4和图5所示。从实验结果可见,本文中提出的自顶向下滤波算法对不同复杂度的地形都有很好的适应性,能够完整地剔除地物点,同时可见,实验结果中有部分电塔的基座也被剔除,由于本文中只关注电力线的提取,因此对电塔的完整性暂时不予考虑。
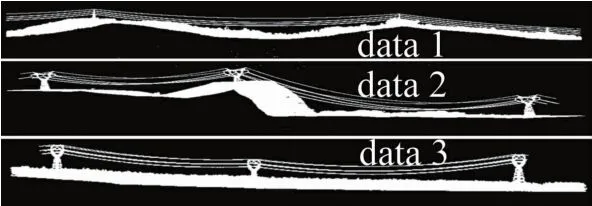
Fig.4 Experimental data

Fig.5 Line and tower point clouds after segmentation

Fig.6 Density descriptor of line and tower point clouds data
接下来,计算剔除地物点后的每个空间网格的密度描述子,将统计结果用折线图表示,如图6所示。从图中可见,无论输电走廊所处地形如何变化、包含的杆塔类型如何变化,电塔点所在的空间网格密度描述子均近似于1。因此在分离线塔点云的过程中,将描述子阈值设置为接近1的值,即可将电力线点云数据从线塔点云中分离出来,剔除电塔点后的实验结果如图7所示。
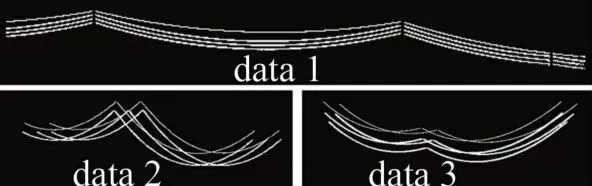
Fig.7 Line point clouds after segmentation
3.2 单条电力线提取实验
对剔除电塔点云后保留下来的电力线点云,使用半径搜索算法搜索单条电力线。分别对3组数据进行实验,并选取3组数据中的任一档数据进行结果展示,对提取出的单条电力线用不同颜色进行染色区分,如图8所示。可以看出,半径搜索算法能完整地实现单条电力线的分离。
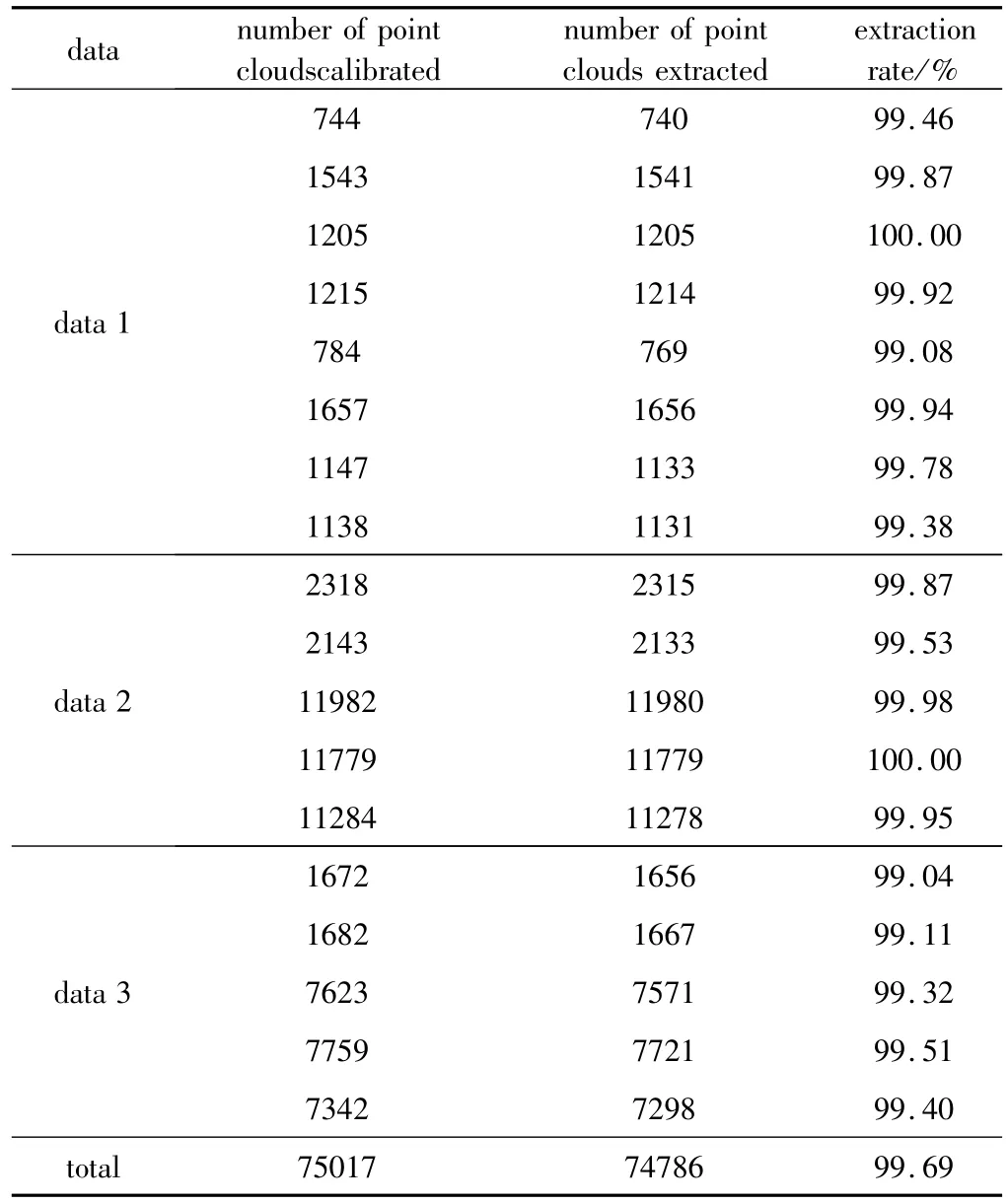
Table 2 Accuracy evaluation of power line extraction
3.3 单条线路提取精度评估
为了验证单条电力线的提取精度,对以上实验结果中的总计18条电力线的提取精度进行评估,评估标准是电力线点云提取率(提取率=提取点云数/标定点云数),统计结果如表2所示。由表2可知,电力线的总提取精度高达99.69%。因此,无论是不同塔型连接的电力线点云数据,还是受地形或植被干扰的点云数据,本文中提出的电力线提取方法都能适配。
4 结 论
通过分析塔线物的空间分布特点,运用空间网格分割算法,提出了一种从激光雷达数据中自动提取电力线的新方法。在地形起伏变化大、受高植被干扰的复杂环境中,该方法可以完整准确地自动提取出电力线,且对多种塔型连接的输电走廊均有较好的鲁棒性。通过实验可以发现,所提出的方法有效地解决了复杂环境下电力线提取精度低的问题,在输电走廊的空间结构自动分析领域具有良好的工程应用价值。
