基于3D激光传感器的汽车连接器PIN针高度检测系统
2020-07-08姜景科严学井
姜景科,秦 琴,严学井,杨 林
(1.上海第二工业大学 环境与材料工程学院,上海201209;2.爱维迅自动化科技(昆山)有限公司,江苏昆山215300)
0 引言
当今,中国汽车行业的快速发展,为汽车的电子技术提供了巨大的发展空间,其中尤以汽车连接器的发展最为突出,而它的市场需求也是最大的。随着汽车连接器制造业的兴起,他们对于汽车连接器尺寸的要求也愈发严苛,对于已经注塑成型的汽车连接器,PIN针高度也成为判断该产品是否符合生产要求的重要指标之一,故PIN针高度信息的高精度检测很有必要。
传统的视觉检测技术现在已经较为普及,常见的2D视觉多用于平面信息的检测,应用广泛,但是检测速度不够快,检测对象比较局限及精度不够高。本系统运用3D视觉检测技术[1],可以快速检测出高度信息,装配的3D Gocator线激光传感器采用与传统相机不同的激光线扫方式[2],获取的点云数据更稳定、更清晰。本系统能够全面快速精确地检测PIN针高度,具有较好的通用性和拓展性。
1 3D激光传感器概述及其工作原理
Gocator线激光传感器主要应用于三维测量和控制。使用Web浏览器进行参数配置,可连接至各种输入和输出设备,也可使用随附的开发工具包进行配置。
Gocator激光传感器从一个角度发出探测目标的激光线,并捕获从目标上反射回来的激光。相机每次曝光捕获一个轮廓,从某种意义上说是捕获一个截面。激光反射回相机的不同位置,具体取决于目标物体与传感器之间的距离。传感器的激光发射器、相机和目标构成一个三角形。Gocator使用激光发射器与相机之间的已知距离以及两个已知角度(其中一个角度取决于相机上激光返回的位置)来计算传感器与目标之间的距离[3],该距离转换为目标的高度。这种计算距离的方法称为激光三角测量法[1],如图1、2所示。

图1 Gocator(2400)工作原理图Fig.1 Gocator(2400)working principle diagram
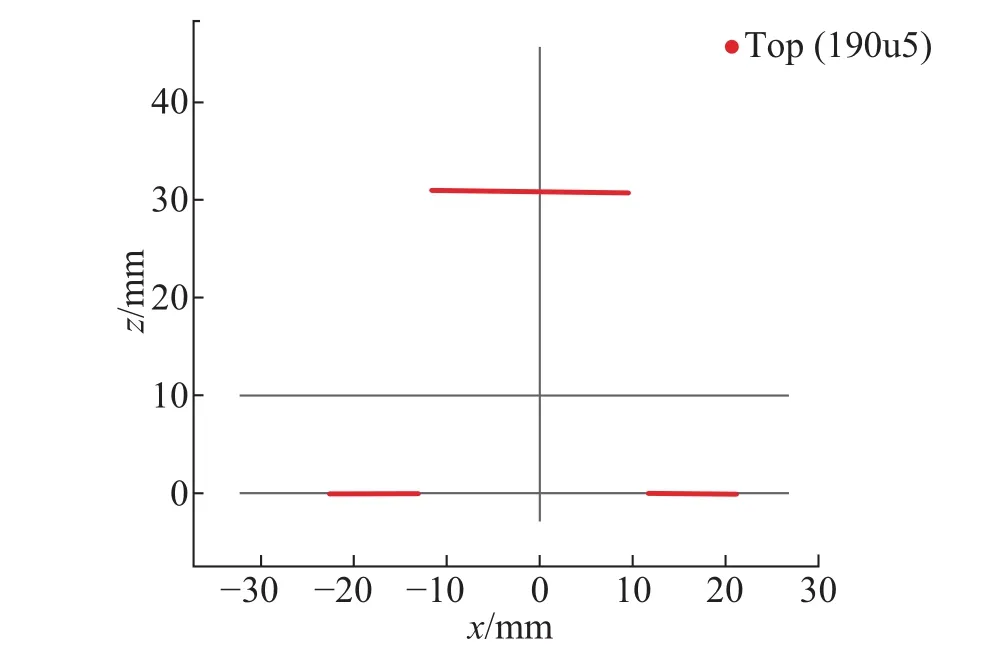
图2生成激光轮廓图Fig.2 Generating laser contour diagram
2 检测系统构成及其流程
2.1 汽车连接器
汽车连接器是本系统的检测对象如图3所示,要求检测该连接器的PIN针高度信息,当高度重复性精度在0.02 mm以内时符合规格要求,认为该连接器合格,否则认为不合格。所谓重复性精度,是指仪器重复多次地完成同一变化过程所对应的结果的最大偏差值,能够反映视觉系统的检测稳定性。该系统中,重复性精度由n次检测的最大值减去最小值得到,测试过程中需保证视觉测量系统的环境基本不变,所用的设备和方法必须保持一致,并检测同一个汽车连接器。

图3汽车连接器视图Fig.3 Automotive connector view
2.2 检测系统基本构成
本系统分为硬件和软件两部分。硬件部分包括:① 上位机;②PLC;③线性模组装置,包括模组控制器和线性模组;④3D Gocator激光相机。上位机用于向PLC发出工作指令,通过PLC完成与3D Gocator激光相机以及线性模组装置的信号交互;PLC与上位机连接,接收上位机的指令控制3D Gocator激光相机的触发以及线性模组装置的运动;被测物体放置在线性模组装置上,3D Gocator激光相机位置固定,用于扫描被测物体生成3D点云数据,并将其数据传输给上位机,线性模组装置与PLC连接,由PLC控制,用于带动被测物体移动;软件部分是指利用EyeVision软件对点云数据进行分析处理,包含通信程序段、图像定位程序段、图像校正程序段、图像预处理程序段以及高度信息检测程序段,最后将检测结果显示出来。其系统结构示意图如图4所示。

图4系统结构示意图Fig.4 Schematic diagram of system structure
2.3 检测流程
本系统的检测过程分为4个部分:
(1)点云图像数据的获取。本系统图像点云数据的获取方式有两种,一种方式是实时在线检测方式,即通过3D Gocator激光相机实时采集图像进行分析处理;另一种方式是离线检测,即将激光相机采集到图像先存入到上位机中,然后再通过EyeVision软件把图像加载到程序中进行分析处理。
(2)点云图像的预处理。连接器在测量过程中会遇到各种干扰信号,所采集的点云图像不清晰,所以在连接器PIN针高度检测之前要对点云图像进行预处理[4],即图像裁切、噪点滤除等操作。点云图像的裁切是切除目标图像外多余的部分,减少图像的存储空间,提高图像的处理速度;噪点滤除是去除或抑制零件图像上的干扰信息,有效提高软件的检测效果。
(3)定位点云图像检测区域。3D Gocator激光相机采集到的原始点云图像包含了汽车连接器的多个信息,只需要对要求测量的目标部分关注即可。
(4)采用合适的算法对其检测并将最终结果显示出来。
3 检测算法设计
3.1 软件介绍
本系统采用德国EVT公司开发的EyeVision软件,该软件广泛适用于应用程序和平台,借助图形用户界面(GUI),能够快速轻松地解决复杂的图像处理方案。由于其高效、可靠、通用性强[5],目前被广泛应用于精密仪器的视觉检测和控制等行业。
3.2 设计方法
传统的高度视觉检测算法[6],原理是先获取目标图像,通过手动选取目标区域,再对目标区域进行预处理,然后定位目标区域的目标点及其顶点(x,y,z),得到顶点坐标信息,其z坐标即为高度数据,如图5所示。

图5定义用户空间坐标系Fig.5 Def i ne user space coordinate system
由于汽车连接器的PIN针可能存在肉眼不可见的轻微磨损,弯曲等的情况,并不是每根针都是理想状态,所以这时采用传统检测算法并不是最优法,可能存在误差较大情况。比如当PIN针顶部局部磨损凹陷出现两个或者多个凸点时,当PIN针顶部被磨平光滑时等等,在这些情况下,在定位PIN针的顶点时系统可能会出现比较大的偏差,导致检测结果误差较大。
针对上述问题,本文设计了多重积分定点法,先获取目标图像,手动选取目标区域,再对目标区域进行预处理,然后定位目标区域的目标点及其顶部位置,再从顶部位置往下约0.1~0.2 mm处切除底部的部分,保留顶部点云图像,最后运用三重积分求得保留的顶部点云图像的重心(¯x,¯y,¯z),其重心¯z坐标即为其高度信息(见图5)。主要运用公式有:

式中,ρ(x,y,z)为几何体的密度。
传统的高度检测算法是通过定位目标物体顶点坐标得出高度信息,本文设计的算法则是通过定位目标物体的重心坐标来得出高度信息,很好地避免了目标物体由于磨损或弯曲等带来的误差问题,从而减小误差,提高检测精度[7]。
得出PIN针高度信息后,再进行多次重复检测得到高度重复性精度,判断高度重复性数据是否在0.02 mm以内,进而可以判断该连接器是否合格。
3.3 设计流程
上述操作可通过装配的3D Gocator激光传感器结合EyeVision软件编程实现,设计流程如图6所示。
首先,程序设计对3D激光传感器初始化,即通过连接Web浏览器进行相机参数配置,包括3D相机的视野范围、激光强度(即曝光度)、采集频率以及采样时间间隔等;然后进行激光相机连接,操作人员输入相机IP地址,由通信模块程序段完成相机连接;相机连接触发后,由通信模块程序段读取3D点云图像,若读取图像失败,则返回相机连接,查看并重新连接,获取图像后,对目标区域进行定位,即通过图像定位程序段选取合适的特征点,对图像进行定位,如图7所示;定位后,再确定图像基准面,即选取零参考平面,如图8所示;然后通过图像预处理程序段对图像进行裁切、噪点滤除等操作[8];接下来在点云图像上选取合适的点建立基准空间坐标系,以此来确定几何体的空间坐标;最后是PIN针高度信息获取,即运用多重积分定点算法,通过高度数据检测程序段得出高度数据,并判断是否合格。

图6设计流程图Fig.6 Design f l ow chart
4 检测结果
4.1 系统运行结果
上位机提供用户界面,用于显示汽车连接器PIN针高度数据和目标物品(汽车连接器)是否合格的状态,如图9所示。
4.2 检测结果分析
检测系统在投入实验之前,已用标定过的标准件测试过实际检测精度。实验采用实时在线检测的方式,利用设计的基于3D激光传感器的汽车连接器PIN针高度检测系统,对汽车连接器进行PIN针高度检测,选取部分PIN针高度及重复性数据结果如表1所示。结果显示在选取的PIN针中,大多重复性数据均在0.02 mm以内,仅有一根PIN针的重复性数据为0.02 mm,故显示该汽车连接器为不合格品。在检测过程中,本系统运行正常,检测结果稳定。

图7图像定位Fig.7 Image positioning

图8确定基准面Fig.8 Determine datum

图9系统用户界面显示Fig.9 System user interface display

表1检测结果Tab.1 Test results
5结 语
本文设计了基于3D激光传感器的汽车连接器PIN针高度检测系统,利用3D Gocator激光传感器相机结合EyeVision软件编程实现对汽车连接器PIN高度的实时检测。区别于传统的视觉检测技术,Gocator 3D激光相机通过三角测量法可直接获取目标物体的三维点云图像,扫描速度最高可达5 kHz。运用的多重积分定点算法,通过EyeVision编程设计,在线检测出PIN针高度,进而可以判断被测汽车连接器是否合格。
