飞翼布局组合舵面航向控制特性综合研究
2020-07-08周铸余永刚刘刚陈作斌何开锋
周铸,余永刚,刘刚,陈作斌,何开锋
中国空气动力研究与发展中心,绵阳 621000
飞翼布局相对于常规布局,取消了用于航向姿态控制的垂尾和用于俯仰姿态控制的平尾,机身与机翼高度融为一体,形成了类似纯机翼构成的、全为升力面的布局形式,其气动效率很高,具备久航远航能力。同时,飞翼布局没有了垂尾和平尾,以及融合了机身与机翼,减少了雷达反射面,加之几何棱边的平行设计,能够有效地获得比常规布局更高的气动隐身特性,有利于突防攻击和隐蔽侦查。机身与机翼的高度融合,内部部件布置更容易、结构设计更简单,空机比重更小,能够装更多的任务载荷和燃油,提高了内部装载能力。因此,飞翼布局相对于常规布局优势明显,常作为远程长航时高隐身无人机、轰炸机的理想布局形式,例如美国的B-2隐形轰炸机、“雷神”/“神经元”/X-47B 无人机等飞机[1]。
飞翼布局正因为取消了常规的平尾和垂尾,相比于常规布局,稳定特性变差,操纵舵面配置困难,特别是航向控制,因此飞翼布局设计的难点之一就是设计合适的航向控制舵,以保证良好操纵性和飞行品质[2]。
国外针对飞翼布局航向控制舵研究起步很早。20世纪90年代,美国针对无尾飞翼作战飞机开展了创新操纵机构(ICE,Innovative Control Effector)计划,该计划第1阶段研究了全动翼尖、嵌入面、开裂式方向舵等阻力类航向控制舵,该计划第2阶段主要针对这些航向控制舵进行了试验测试和计算分析,并指出阻力类航向控制舵具有比较满意的操纵性能[2-4]。瑞典皇家理工学院研究了差动后缘襟翼的航向控制舵方案[5]。英国、德国、荷兰、韩国、加拿大等国家针对飞翼布局开展了一些数值计算和风洞试验研究[6-9],但重点关注的是其基本外形方案设计与气动特性评估,在航向控制舵特性研究方面能搜索到的资料较少。
国内针对飞翼布局航向控制舵的研究起步相对较晚。随着飞翼概念越来越受到青睐,此方面的研究逐渐增多,如中国空气动力研究与发展中心(CARDC)、北京航空航天大学、西北工业大学、空军工程大学、同济大学等单位都开展了相关研究。航向控制舵主要包含差动内外副翼、开裂式方向舵、全动翼尖、嵌入式阻力舵、嵌入式阻力舵与副翼的组合舵、差动前缘襟翼、变体V尾、机头机动边条、机翼前缘不对称安装绕流物、引射阻力舵等,主要是通过飞机两侧的阻力差量产生偏航力矩,实现航向控制。差动内外副翼可以获得较好的航向控制效果,但占用了较多后缘舵面,留给纵横向控制的舵面难以保障,尤其是小展弦比飞翼布局,此情况尤为突出;开裂式方向舵是较好的航向控制方案,能提供较大的偏航力矩,但同时伴生了较大的滚转力矩和俯仰力矩,会产生严重的三轴操纵耦合,具有显著的附加力和力矩效应[10-16];机头机动边条能够在很大的迎角范围产生可观的不对称侧力和偏航力矩,但同时会带来较大的抬头力矩[10,17];全动翼尖不仅能增加横向安定性,也能提供一定量的偏航力矩,在结合其后缘舵面偏转情况下,可满足飞机航向控制要求,但同时也伴生了较大的滚转力矩和俯仰力矩[10,18-19];单独嵌入式阻力舵可提供较大的偏航力矩,但会耦合更大的滚转力矩和俯仰力矩,嵌入式阻力舵与副翼的组合舵提供了更大的偏航力矩,显著减小或消除与滚转、俯仰的耦合程度[20-22];引射阻力舵不仅具有较高的绝对效率,而且其可控性强,可根据实际需要调控其效率及线性度[23],但增加了引气系统;差动前缘襟翼能够提供一定航向控制能力,但效率较低;变体V尾结合其后缘偏转舵面,能够提供满足飞机安全飞行的航向控制能力,但会给布局、重量、结构等方面带来较大的设计难度。
以上研究工作都是基于1种或2种手段来分析研究飞翼布局航向控制特性的,个别初步分析了流场机理。本文基于自主设计的类X-47B飞翼布局,结合CFD、风洞试验和缩比模型飞行试验(简称:模飞试验)3种研究手段,提出了一种上翼面嵌入式阻力舵和后缘副翼组成组合舵的航向控制方案,综合分析了其在低、亚声速时航向控制特性,揭示了不同舵偏情况下的流场机理,演示验证了该方案的有效性和可靠性。本文的研究结论可为解决亚声速飞翼布局飞行器航向控制问题提供一定的技术参考。
1 模型与研究手段
1.1 模 型
本文中等展弦比(A=4.58)飞翼布局为自主设计的类X-47B飞翼布局,如图1所示。嵌入式阻力舵(Spoiler,缩写s)位于机翼翼尖附近,其平面形状为平行四边形,以前后缘平行于外段翼前后缘、两头端面顺流向的方式布置,位于展向62.5%~79%、当地弦长30%~55%处,单侧面积为1.2%参考面积,舵偏角范围为0°~90°。副翼(Aileron,缩写a)位于嵌入式阻力舵正后方,亦采用平行四边形的平面形状,位于当地弦长70%~100%处,单侧面积为1.38%参考面积,舵偏角范围为0°~50°,为避免阻力舵打开后、主翼上的凹坑或空腔对流场产生不利影响,则用蒙皮整流。规定:嵌入式阻力舵上偏为正,副翼下偏为正。
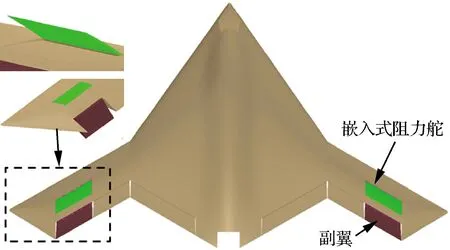
图1 飞翼布局及航向操纵舵面
1.2 研究手段
1) 风洞试验
试验在CARDC FL-13风洞进行,FL-13风洞是一座开路式、闭口串列双试验段的大型低速风洞,本试验的试验段长15 m、宽8 m、高6 m,横截面为切角矩形,中心截面有效面积为47.4 m2,常用风速为20~80 m/s。试验模型为通气模型,如图2所示,翼展4 m。
2) 数值计算方法
计算使用求解器为自主研发的PMB3D程序,其主控方程为三维积分形式的雷诺平均Navier-Stokes(N-S)方程[24],以有限体积法构造空间半离散格式,无黏项采用Roe平均迎风通量差分分裂格式离散,黏性项采用中心差分格式离散,计算采用k-ωSST二方程湍流模型,运用多重网格、残值平均和局部时间步长等方法加速收敛。
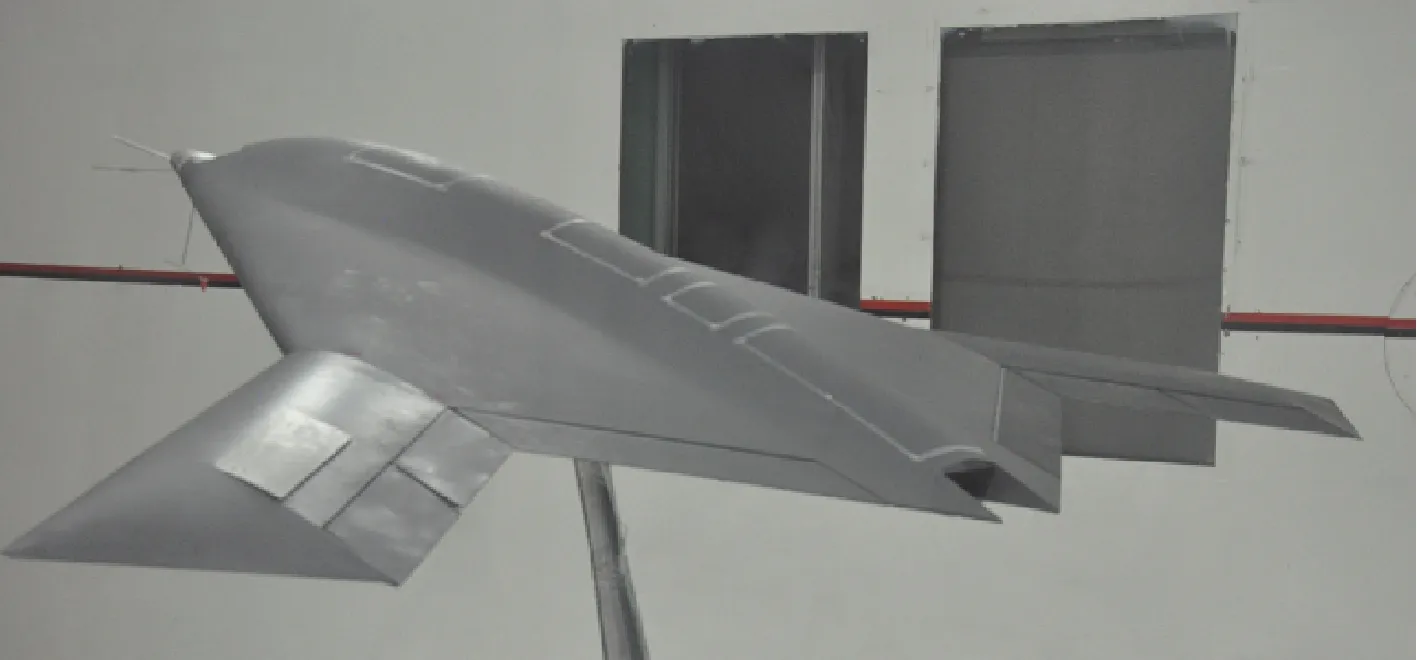
图2 FL-13风洞试验模型
计算网格为结构多块重叠网格,在外形和流场变化剧烈的空间区域进行适当网格加密,物面法向第1层网格厚度为0.01 mm,对应的y+值为1~2,半模网格为1 500万级。
图3对比了马赫数Ma=0.118、雷诺数Re=3.6×106时基本构型的计算数据与风洞试验数据,其中Cm为俯仰力矩系数、CL为升力系数、CD为阻力系数、k为升阻比、α为迎角,从图中可以看出,计算与试验结果吻合较好,该计算方法可以用于此类飞行器特性评估。
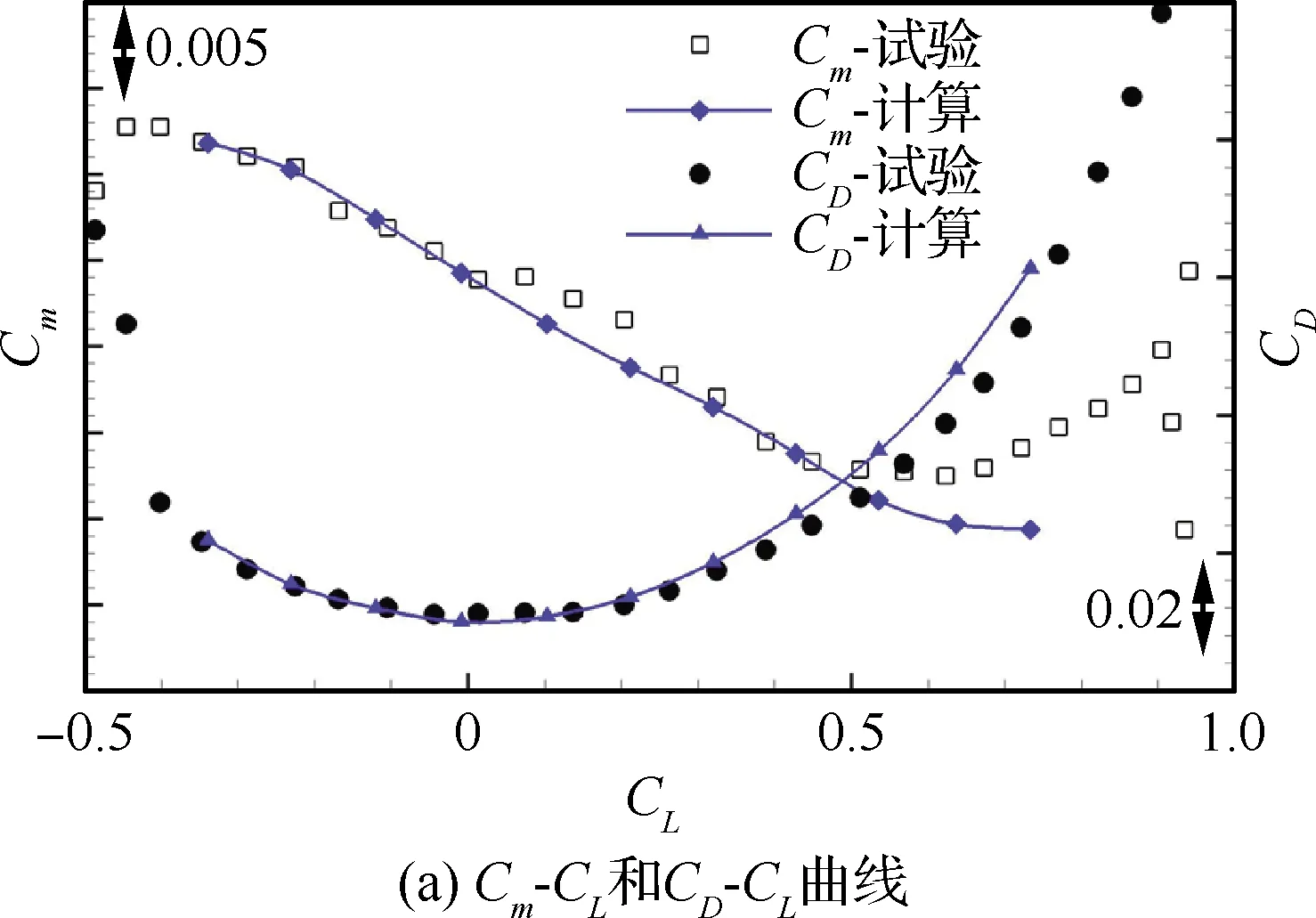

图3 计算数据与试验数据对比
3) 模飞试验
模飞试验是按照动力学相似规律,利用飞行器缩尺模型(或验证机)在真实大气中进行模拟飞行,研究和验证气动/飞行特性、新概念/新技术/新布局的试验手段和方法[25]。相比地面试验,模飞试验具有环境条件更加真实、气动/结构/飞行/控制/动力等多学科综合应用的特点;相比全尺寸飞行器的全系统飞行试验,模飞试验具有周期短、成本低、风险小等特点。
本试验采用单台190 kg级推力的涡喷发动机作为动力,翼展4 m,起飞重量达400 kg量级,模型如图4所示,沿着预定规划的矩形轨迹线逆时针飞行,从地面滑跑、起飞、爬升、加速至巡航速度平飞、下降、着陆,实现整个过程中“人在回路”的全自主飞行试验。

图4 模飞试验模型
2 基本构型气动特性
基本构型是指所有舵偏角为0°时的外形,分别分析了其低速和高速力矩特性。低速状态为Ma=0.118、Re=3.6×106,高速状态为Ma=0.6、Re=7.0×106,其中低速力矩特性来源于风洞试验数据,高速力矩特性来源于CFD计算数据。模型重心位于距离机头53.87%机身长度处。
图5给出了基本构型在Ma=0.118、不同侧滑角时偏航力矩系数(Cn)、俯仰力矩系数(Cm)、滚转力矩系数(Cl)随迎角变化曲线。
迎角-5°~+3°范围内,Cn基本不变随迎角变化,航向静稳定度Cnβ≈-0.000 13,迎角+3°~+8° 范围内,随迎角增大|Cn|逐渐减小,迎角8°附近时|Cn|达到最小,Cnβ从-0.000 13变化到-0.000 05,迎角8°之后,随迎角增大|Cn|开始增大;整个研究迎角范围内,该布局低速航向呈现弱静不稳定,体现了飞翼布局固有的航向特性。
该布局低速纵向静稳定,Cmα约为-0.001 5,在迎角0°~2°范围纵向静稳定度减小,Cmα约为-0.000 6, 曲线在8°附近发生明显拐折,随后在+8°~+13°范围出现幅值变化不大的近似平台;在研究侧滑角范围内,同迎角下Cm随侧滑角变化不大,最大变化幅值在0.000 3左右,这有利于减小滚转配平损失。
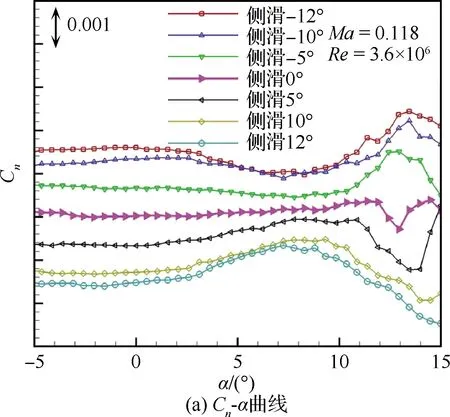
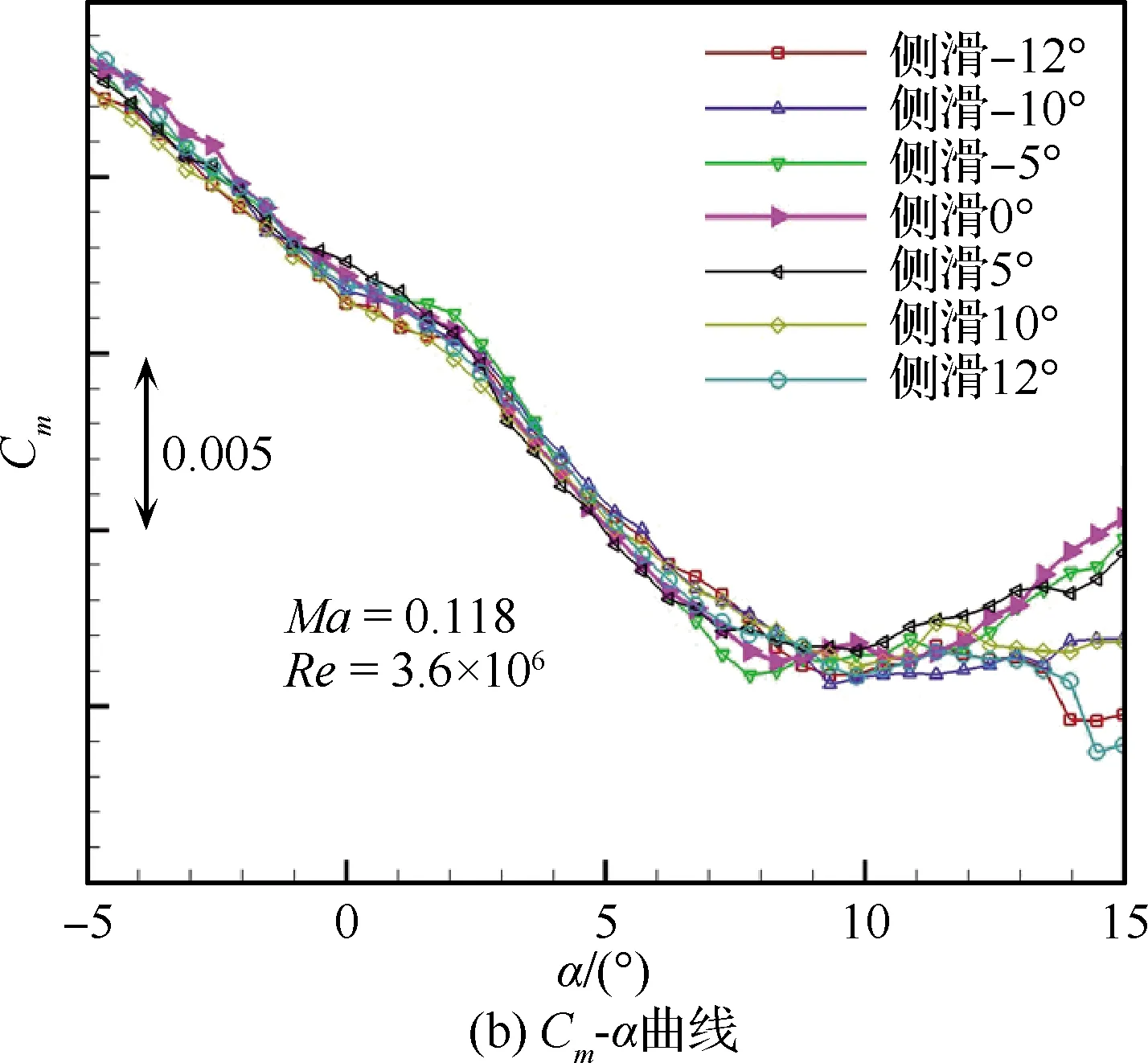

图5 基本构型全机力矩特性(Ma=0.118)
该布局低速横向静稳定,随迎角变化,横向静稳定度Clβ在-0.000 1~-0.001 6之间变化,迎角越小,|Clβ|越小,迎角13°后的|Clβ|与迎角13°的|Clβ|相当;另外,同迎角下Clβ随侧滑角变化不大。
图6给出了基本构型在Ma=0.6、不同侧滑角时Cn、Cm、Cl随迎角变化曲线。迎角-3°~+9°
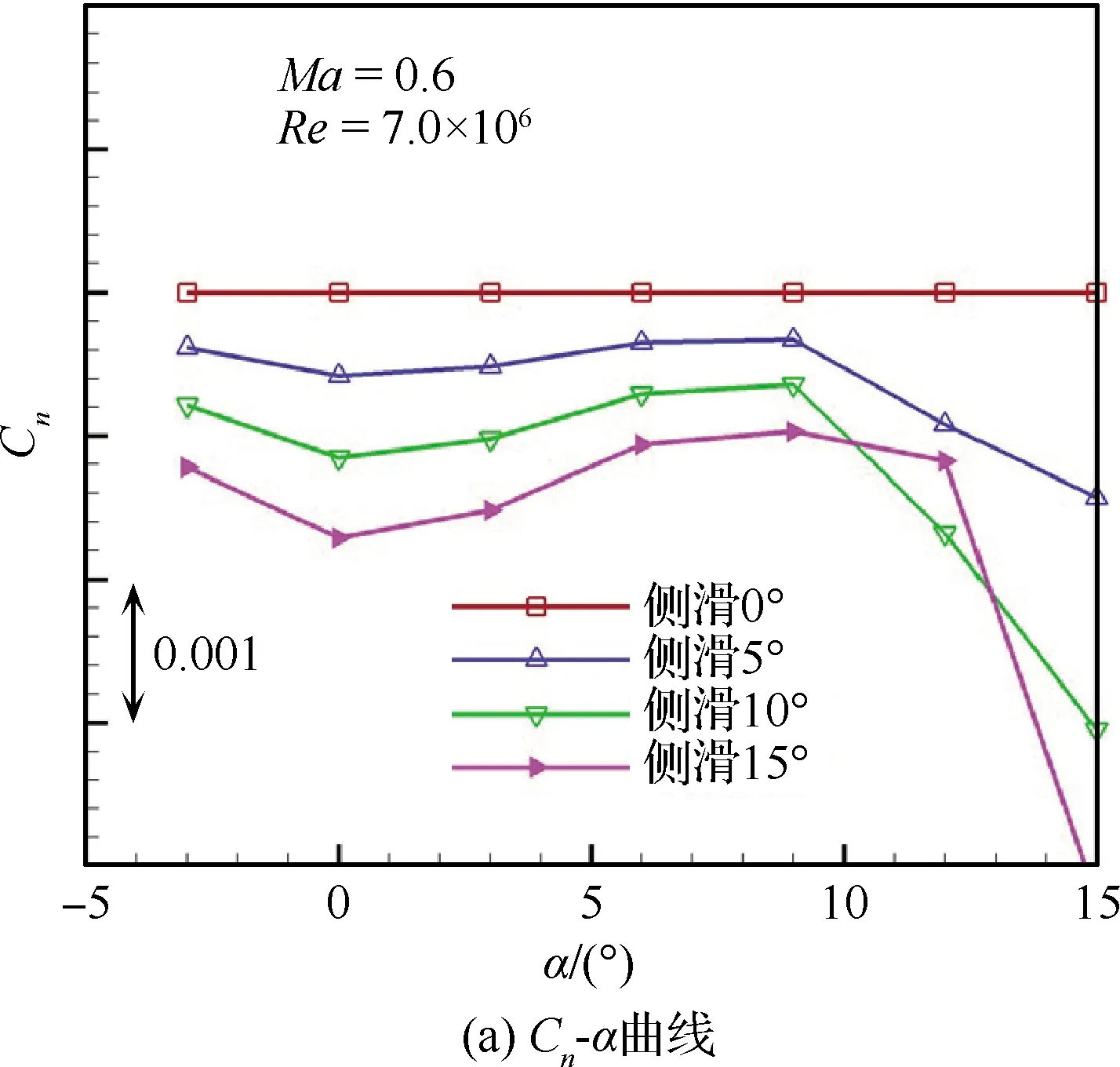
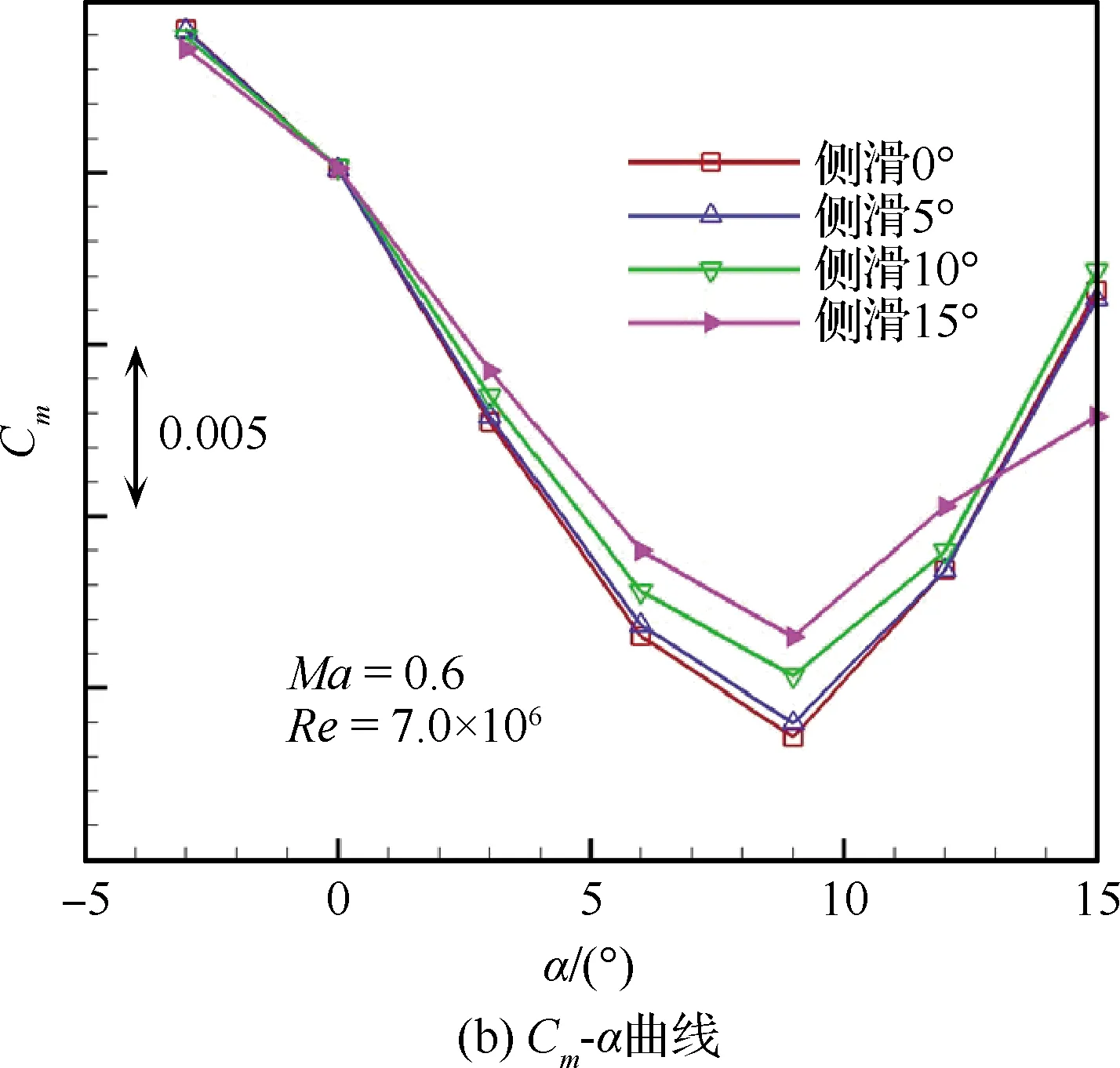
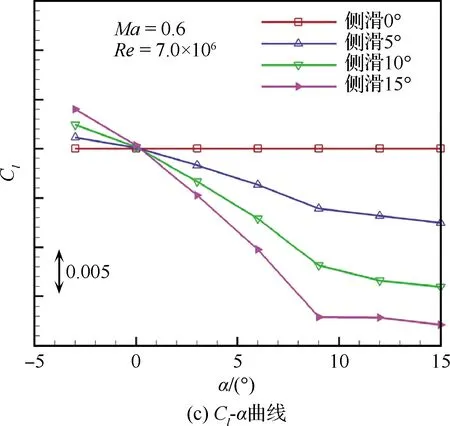
图6 基本构型全机力矩特性(Ma=0.6)
范围内,该布局航向Cnβ值在-0.000 06~-0.000 12 之间变化,迎角9°(失速迎角)后|Cnβ|增大,但在整个研究迎角范围内,高速航向属于弱静不稳定,另外,同迎角下Cnβ值随侧滑角变化不大;高速纵向静稳定,侧滑0°时Cmα约为 -0.002 4,纵向静稳定度随侧滑角增大,呈“先少后多”非线性变化形式减小,即侧滑角越大减小量越大,侧滑15°时Cmα约为-0.002,对比高低速Cm特性,高速比低速时纵向更加稳定;迎角9°后Cm曲线上扬,呈现纵向静不稳定;高速横向静稳定,迎角-3°~+9°范围内,随着迎角变化,Clβ值在-0.000 2~-0.001 2之间变化,迎角越小,|Clβ|越小;迎角9°后横向静稳定变化不大。
3 航向控制方案
本文研究了右侧机翼上单独嵌入式阻力舵、单独副翼、同角度偏转组合舵、异角度偏转组合舵4种航向控制方案的力矩特性,通过对比分析,得出各自的性能优劣,并给出了一种最佳组合方案的建议。
3.1 单独嵌入式阻力舵
阻力舵为具备一定厚度的板面,打开后增大了迎风面积,致使阻力舵附近的阻力增大,配合较长的力臂,从而产生了偏航力矩Cm,由此控制航向飞行姿态。但阻力舵打开后改变了原来的绕流形态,舵前机翼上翼面气流受阻,速度减小,负压量值减小,气流绕过阻力舵,在舵后产生了流动分离,使得舵后机翼上表面负压量值减小,并在分离区域范围保持一个定值,因此,整个机翼上翼面的负压量值减小导致机翼的升力有所损失,从而引起纵向和横向力矩的耦合效应。
图7给出了右侧嵌入式阻力舵单独偏转时低速力矩特性。舵偏角小于6°时力矩变化规律差。迎角-5°~+9°范围内,Cn随迎角增大而增大,舵效 (每度舵偏角产生的Cn值)在0.000 02~0.000 15之间变化,迎角9°之后,阻力舵已完全处于机翼背风区,|Cn|减小,舵效开始下降;随舵偏角增大,Cn呈非线性变化,舵偏角越大,舵效越大。
阻力舵位于重心之后,阻力舵附近的升力损失会使飞行器产生相应的抬头力矩,舵偏角小于12°时,舵前阻流和舵后分离效应不明显,升力损失不大,因此Cm变化不大,但舵偏角大于15°时,舵前阻流和舵后分离效应开始增强,Cm变化明显,且随舵偏角增大俯仰力矩系数变化量ΔCm更大。
阻力舵位于翼尖附近,展向力臂较长,阻力舵附近的升力损失同时会产生耦合Cl,舵偏角越大,对升力破坏更大,Cl变化量就越大。

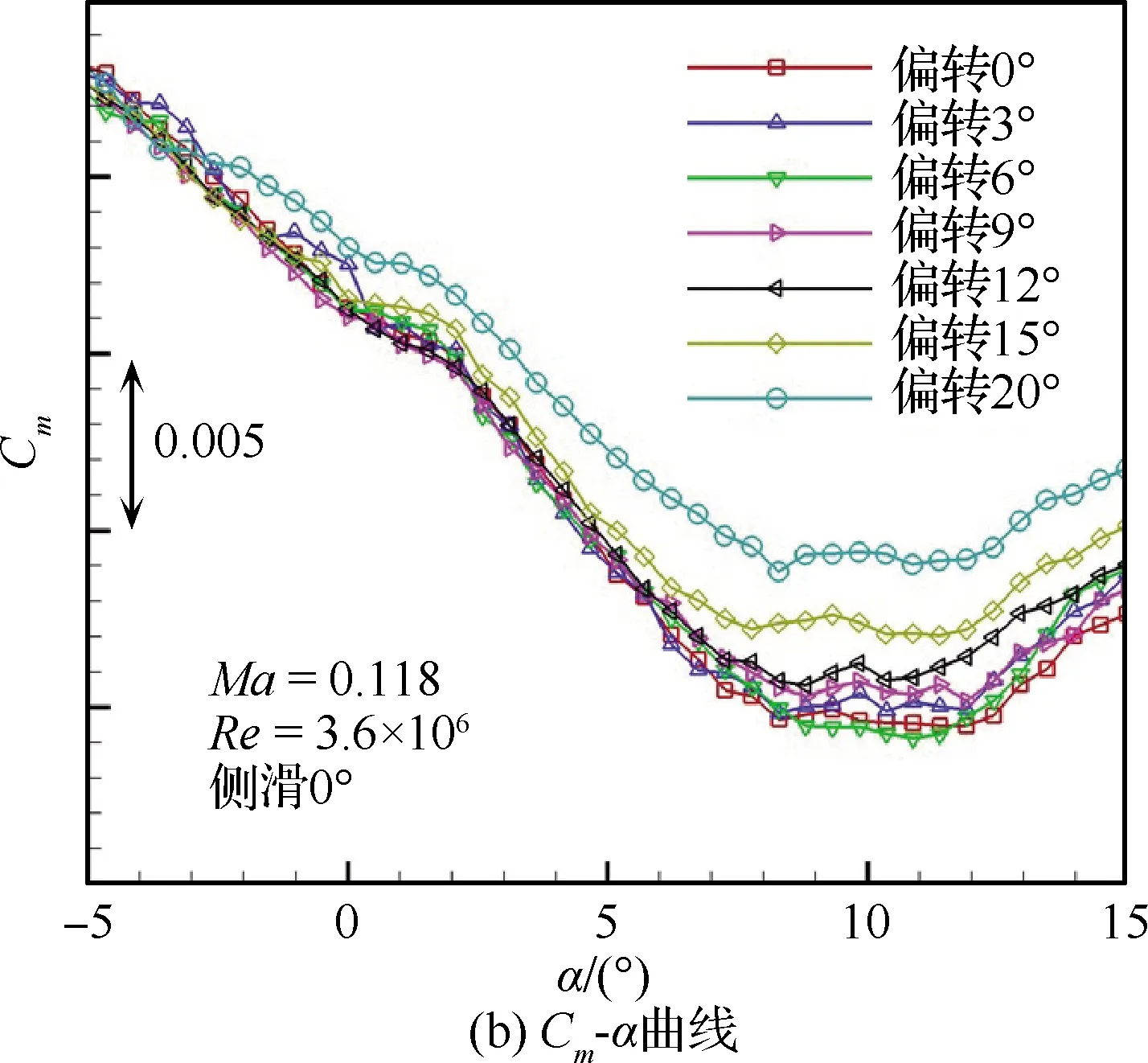

图7 嵌入式阻力舵单独偏转时全机低速力矩特性
迎角7°、偏转20°时,Cn≈0.002 6,舵效为0.000 13, 舵效较高,但同时产生了1.65倍Cn的ΔCm和2.17倍Cn的ΔCl变化量,与纵横向耦合都较严重。
图8给出了右侧嵌入式阻力舵单独偏转时高速力矩特性。Cn随迎角的变化趋势近似呈横放的S型,舵效位于0.000 07~0.000 14之间,在迎角9°时舵效达到最大。高速时力矩特性对外形比较敏感,小舵偏带来的外形变化也能引起Cm和Cl的明显变化,耦合效应增强,只是随着舵偏角增大,ΔCm和ΔCl逐渐减小。
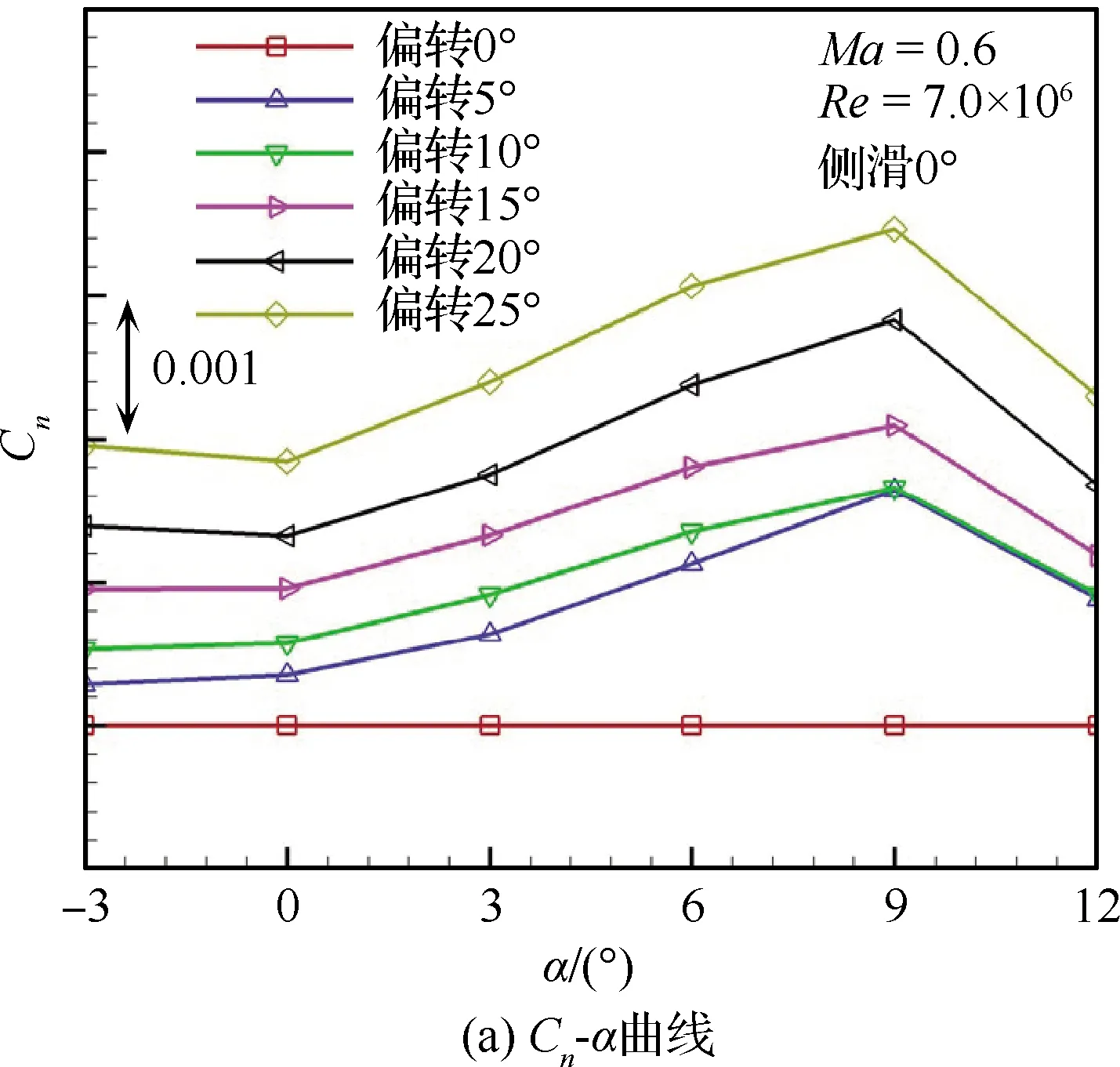


图8 嵌入式阻力舵单独偏转时全机高速力矩特性
迎角3°、偏转20°时,Cn≈0.001 75,舵效为0.000 088,但同时附加产生了4.55倍Cn的ΔCm和4.53倍Cn的ΔCl变化量,与纵横向耦合都严重。
由以上分析可见,单独嵌入式阻力舵航向控制效率高,但与纵横向耦合程度较为严重,对俯仰配平和滚转配平提出了较高需求。
3.2 单独副翼
副翼下偏后,直接增大了机翼当地的后缘弯度,使得机翼的升力和阻力都增大,单侧阻力变化可以提供Cn,但同时升力变化也会引起Cm和Cl的变化,产生耦合效应。与单独嵌入式阻力舵对比,不同之处是此处增升而非降升、产生负滚转而非正滚转。单独副翼特性曲线如图9所示。
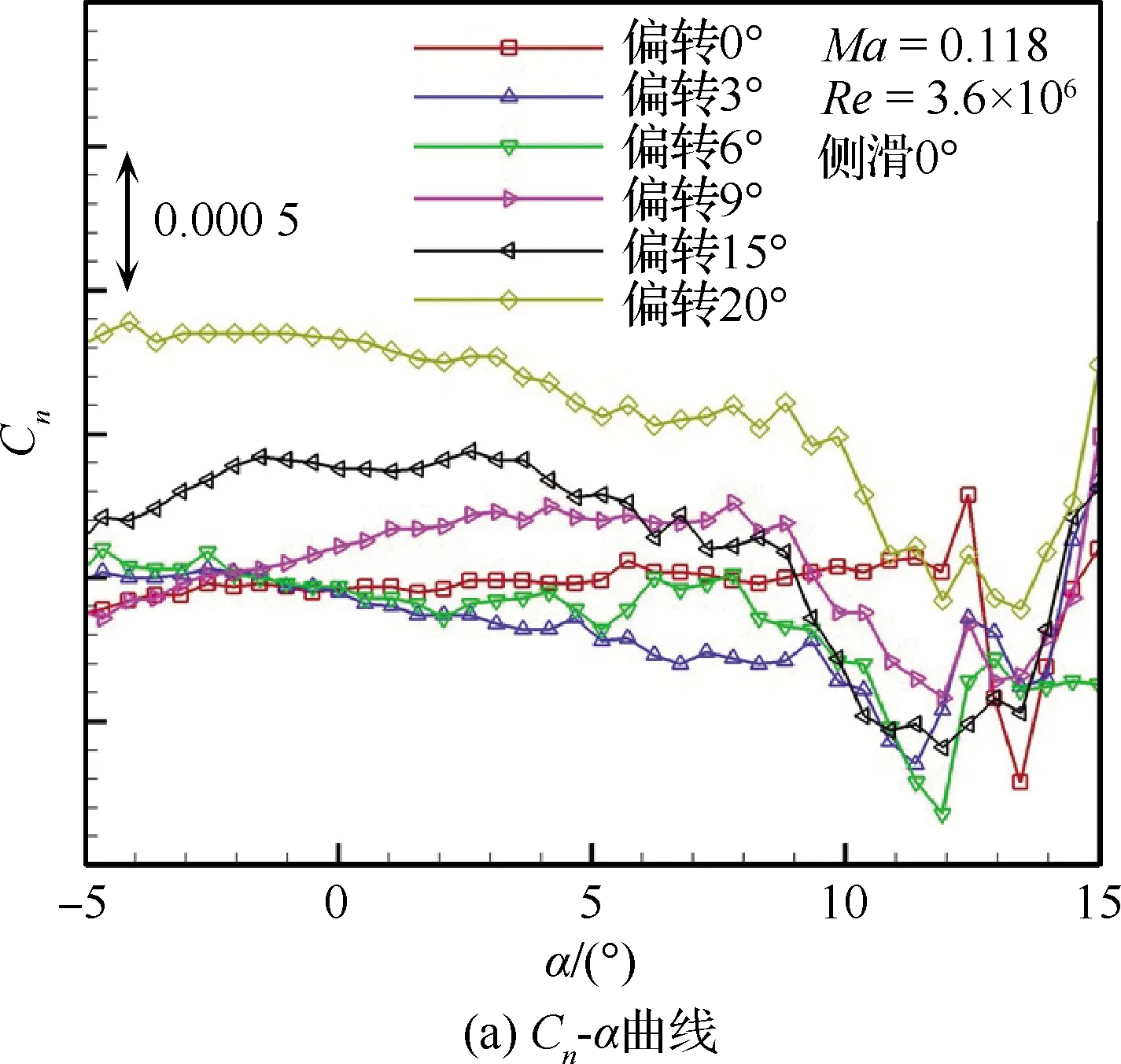
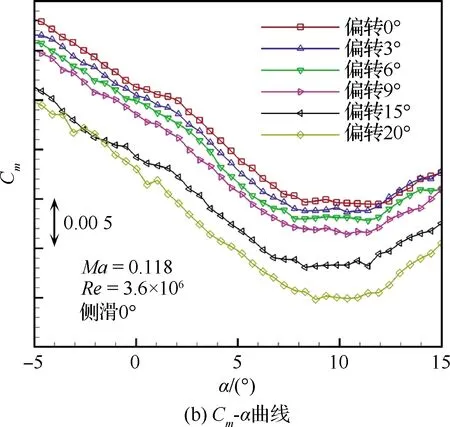

图9 副翼单独偏转时全机力矩特性
副翼舵偏角小于9°时,Cn随舵偏角的变化规律差,并出现负值,这可能是为了满足设计点设计成纵向接近配平状态而采用反弯站位翼型、小角度下偏的副翼刚好减小了后缘卸载弯度、从而减小了该侧阻力引起的(具体原因需作进一步研究);同时,不同偏转角下的Cl曲线交错变化,产生的Cl在一个量级,没有Cl随偏转角变化的规律可寻。副翼偏转角大于9°时,小迎角下Cn和Cl随偏转角增大而增大,但迎角7°后舵偏角15°的Cn比舵偏角9°的Cn小,出现舵效反效,且在迎角9°后失效,使用迎角范围受限。
整个副翼舵偏角范围,Cm变化规律良好,只是舵偏角越大,产生的低头力矩越大,俯仰配平需求越大。
迎角7°、偏转20°时,Cn≈0.000 028,舵效很低,附加产生了16.73倍Cn的ΔCm和13.27倍Cn的ΔCl变化量,与纵横向耦合非常严重,单独副翼不适合作为航向控制措施使用。
3.3 组合舵
飞翼布局没有了依靠产生侧向力来控制航向的立尾,代之的是依靠增加飞机单侧阻力来控制航向的阻力舵。由上述分析可知,嵌入式阻力舵和副翼单独用于航向控制时,均存在耦合的|ΔCm|和|ΔCl|明显大于|Cn|,耦合效应将对姿态控制产生不利影响,需要尽量解耦设计。研究中发现,嵌入式阻力舵产生了增阻破升效果,副翼产生了增阻增升效果,嵌入式阻力舵单独上偏和副翼单独下偏对ΔCm和ΔCl的贡献恰好相反。结合单独嵌入式阻力舵高效率的航向控制和单独副翼高效率的纵横向控制,提出了一种嵌入式阻力舵与其正后方的副翼组成的组合舵航向控制措施设计方案,通过两个舵的舵偏角的协调匹配,使阻力舵和副翼间的流动产生干扰,产生增阻定升的效果,增加阻力,可进一步提高航向控制效率,保持偏舵前后升力不变,可最大程度削弱与纵横向耦合程度,达到舵面解耦设计。
1) 同角度偏转组合舵
同角度偏转组合舵即为以嵌入式阻力舵和副翼向相反方向偏转相同角度而形成的组合舵。
图10给出了同角度偏转组合舵在不同舵偏角时低速力矩特性,组合舵比单独部件的力矩特性更加良好。除舵偏角6°以下组合舵Cn变化规律差之外,其他舵偏角下组合舵Cn变化规律良好。迎角12°以前Cn值随迎角变化幅度较小,改善了单独阻力舵小迎角时的Cn特性,迎角12°之后Cn值缓慢减小。不同舵偏角的组合舵舵效位于0.000 02~0.000 2之间,舵偏角越大舵效越大。在整个研究迎角范围内,航向控制有效。
舵偏角30°以下时组合舵Cm变化规律良好,舵偏角30°及以上时组合舵Cm特性变差,纵向静稳定性减弱,线性段范围变窄;所有舵偏角下的组合舵随着舵偏角增大低头力矩增大,且变化幅值较大。
不同舵偏角下组合舵的Cl曲线交错,变化复杂,没有明显的规律性可言;40°和50°舵偏角的组合舵Cl随迎角变化剧烈,迎角大于6°时产生了正Cl;其他状态组合舵Cl随迎角变化缓慢且产生了负Cl;组合舵没能完全抵消附加的ΔCl。
迎角7°、偏转20°时,Cn≈0.002 75,舵效为0.000 14,同时附加产生了1.29倍Cn的ΔCm和0.76倍Cn的ΔCl变化量,与纵向耦合较大。
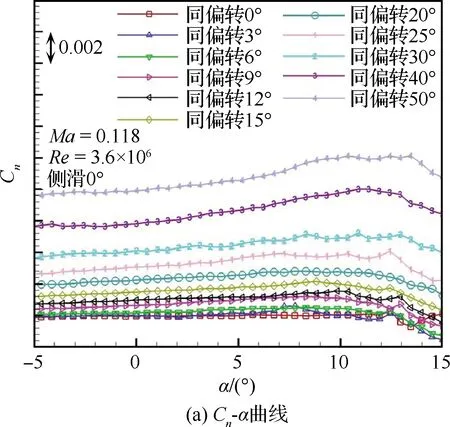

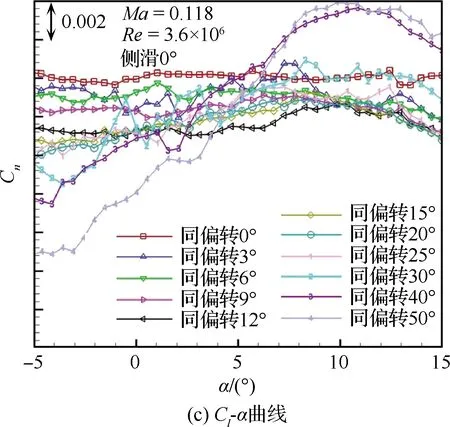
图10 组合舵同角度偏转时全机低速力矩特性
图11给出了同角度偏转组合舵在不同舵偏角时高速力矩特性。除舵偏角3°外,其他舵偏角下的组合舵Cn在研究迎角范围内变化规律都很好,且随迎角的变化幅值很小,同时,随舵偏角增大舵效增大,舵效位于0.000 1~0.000 2之间,航向舵效高。舵偏角越大,纵向静稳定减弱,|ΔCm|越大,配平需求越大。随迎角增大,Cl曲线总体规律为增大,且从负滚转转变为正滚转。
迎角3°、偏转20°时,Cn≈ 0.002 6,舵效为0.000 13, 同时附加产生了0.11倍Cn的ΔCm和0.58倍Cn的ΔCl变化量,纵横向耦合很小。
根据以上分析可知,同角度偏转组合舵力矩特性优于单个部件力矩特性,并可进一步消弱与纵横向的耦合程度,体现出了组合舵的优势。
2) 异角度偏转组合舵
异角度偏转组合舵即为以嵌入式阻力舵和副翼向相反方向偏转不同角度而形成的组合舵。
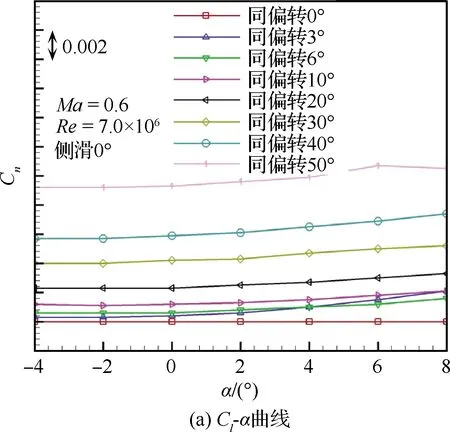
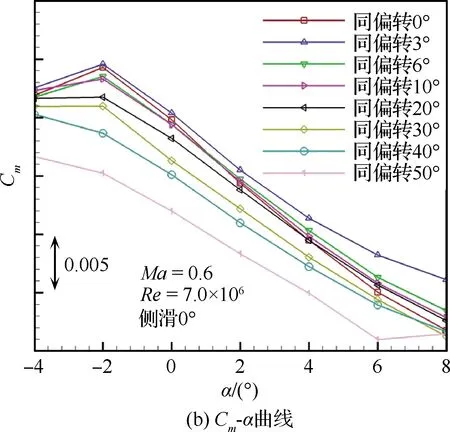

图11 组合舵同角度偏转时全机高速力矩特性
图12给出了异角度偏转组合舵在不同舵偏角时低速力矩特性,组合舵中的阻力舵舵偏角大于副翼舵偏角。
迎角12°之前Cn随迎角增大而逐渐增大,舵偏角越大的组合舵Cn随迎角的变化幅度越大,舵效位于0.000 05~0.000 2之间,舵偏角越大舵效越高,迎角12°后Cn随舵偏角的变化规律复杂,使得可用迎角受限。组合舵打开后,附加产生了低头力矩,舵偏角越大低头力矩越大。Cl曲线总体趋势是随迎角增大而增大,随舵偏角的变化规律较差,与同角度偏转的组合舵特性一致,大部分情况下产生了负滚转。
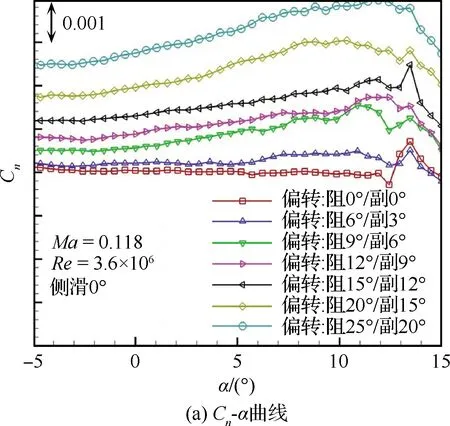
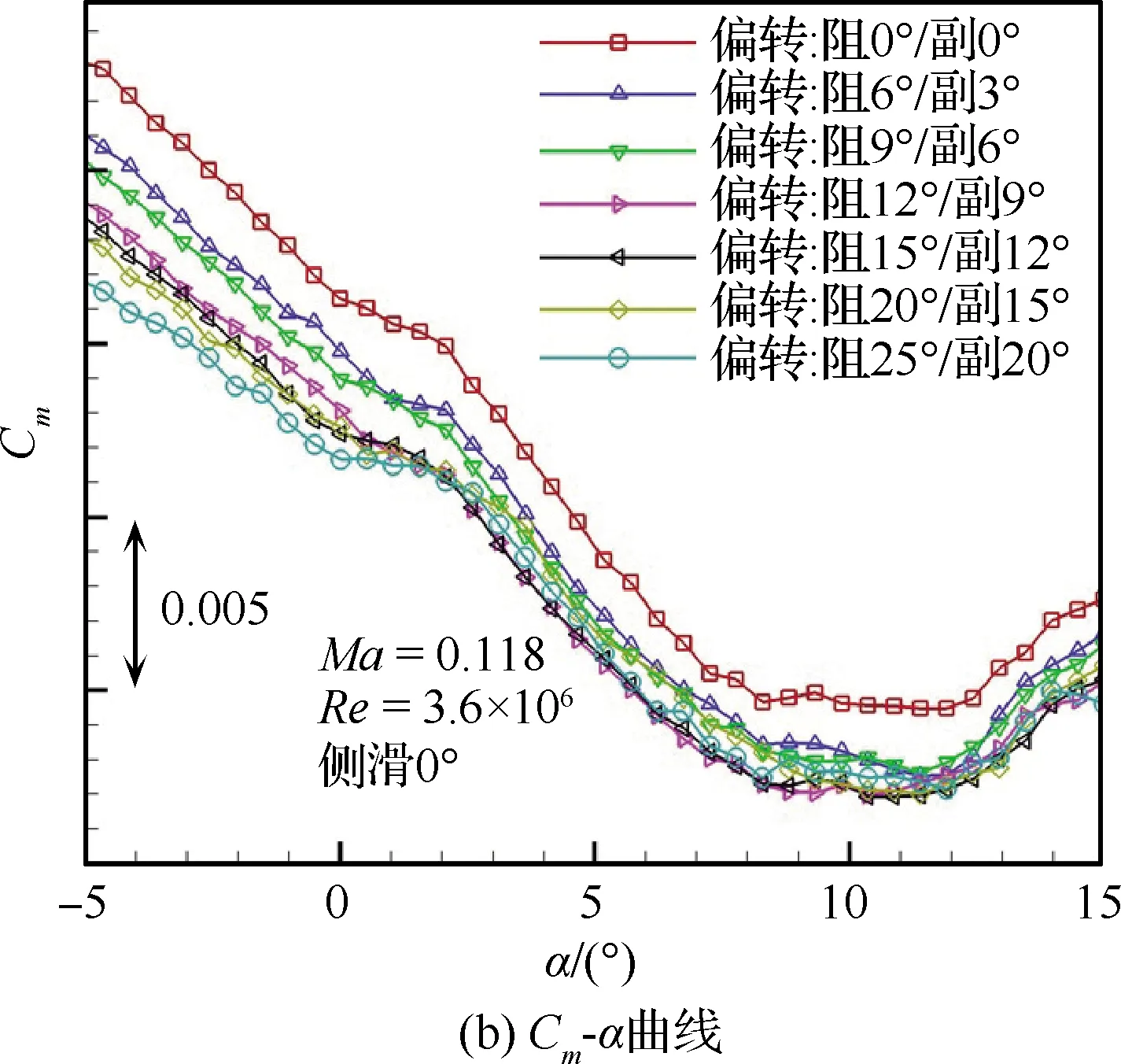
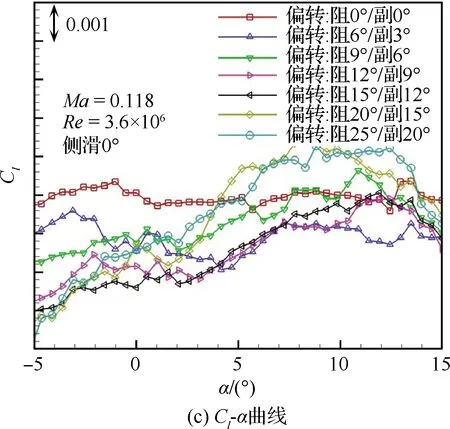
图12 组合舵异角度偏转时全机低速力矩特性
迎角7°、偏转25°/20°(阻力舵/副翼)时,Cn≈0.003 62,舵效为0.000 18,附加产生了0.56倍Cn的ΔCm和0.24倍Cn的ΔCl变化量,纵横向耦合都较小。
图13给出了异角度偏转组合舵在不同舵偏角时高速力矩特性。所有舵偏组合中,阻力舵舵偏角大于副翼舵偏角时大部分组合舵附加产生了抬头力矩和正滚转,相反,阻力舵舵偏角小于副翼舵偏角时大部分组合舵附加产生了低头力矩和负滚转;阻力舵舵偏角与副翼舵偏角的角度差异越大,与纵横向耦合程度越大。
迎角3°、副翼舵偏角20°时,当阻力舵舵偏角大于副翼舵偏角5°时,产生了0.61倍Cn的ΔCm变化值,与纵向耦合较小,但与横向耦合较大,产生了1.18倍Cn的ΔCl变化量;当阻力舵舵偏角小于副翼舵偏角5°时,产生了0.15倍Cn的ΔCl变化量,与横向耦合小,但与纵向的耦合相对较大,产生了0.85倍Cn的ΔCm变化量。针对该布局,滚转配平比俯仰配平更加容易,因此选取方案上更加倾向于阻力舵舵偏角大于副翼舵偏角的组合方式。
另外,组合舵舵偏角越大,Cn值越大,舵效越大,舵效位于0.000 05~0.000 15之间,航向控制能力越强,迎角3°、舵偏角25°/20°(阻力舵/副翼)时航向舵效为0.000 14。

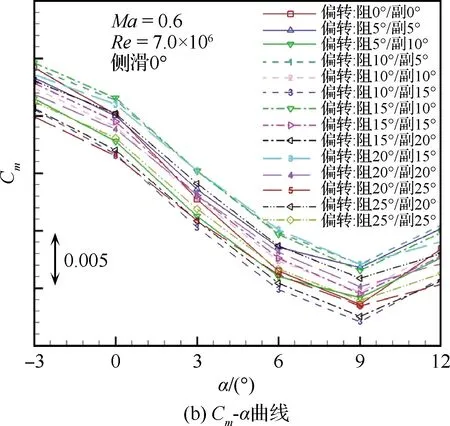
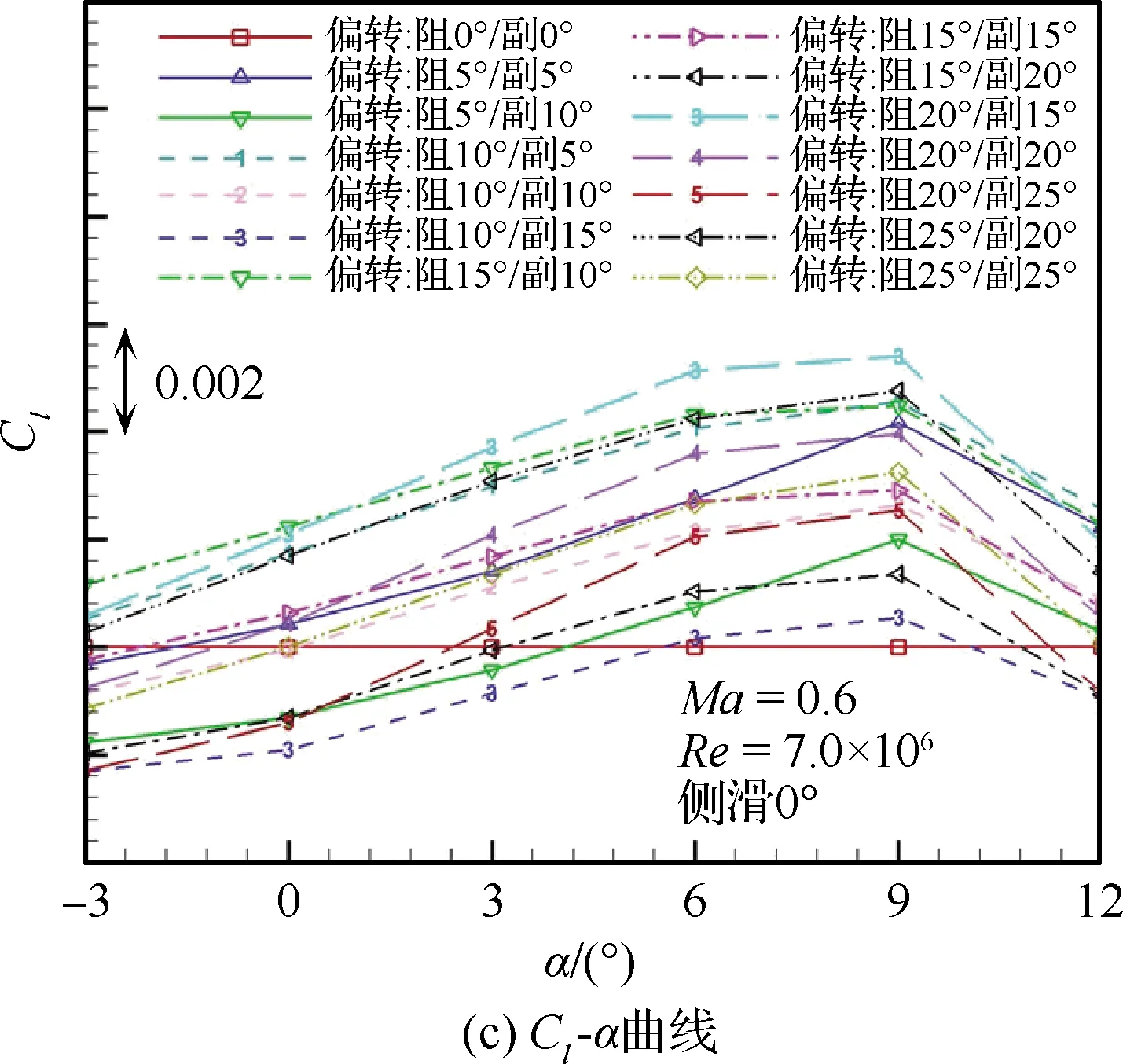
图13 组合舵异角度偏转时全机高速力矩特性
3.4 4种方案对比
图14给出了单独阻力舵、单独副翼、同角度偏转组合舵和异角度偏转组合舵4种方案在舵偏角为20°左右时低/高速力矩特性对比,图例“偏转:阻20°/副20°,Ma=0.118”表示阻力舵上偏20°、副翼下偏20°构型在马赫数0.118时的状态,其余依此类推。
舵偏角25°的阻力舵与舵偏角20°的副翼组成的异角度组合舵(简称25°/20°组合舵)的舵效在整个计算迎角范围内都是最大的,且随迎角变化缓慢,与纵横向耦合小;20°/20°组合舵虽然与纵横向耦合小,且高速舵效与25°/20°组合舵的相当,但低速舵效明显小很多;单独阻力舵舵效随迎角变化较大,在较大迎角时舵效才与20°/20°组合舵舵效相当,且与纵横向耦合较严重;单独副翼不仅舵效最低,且与纵横向耦合最大。


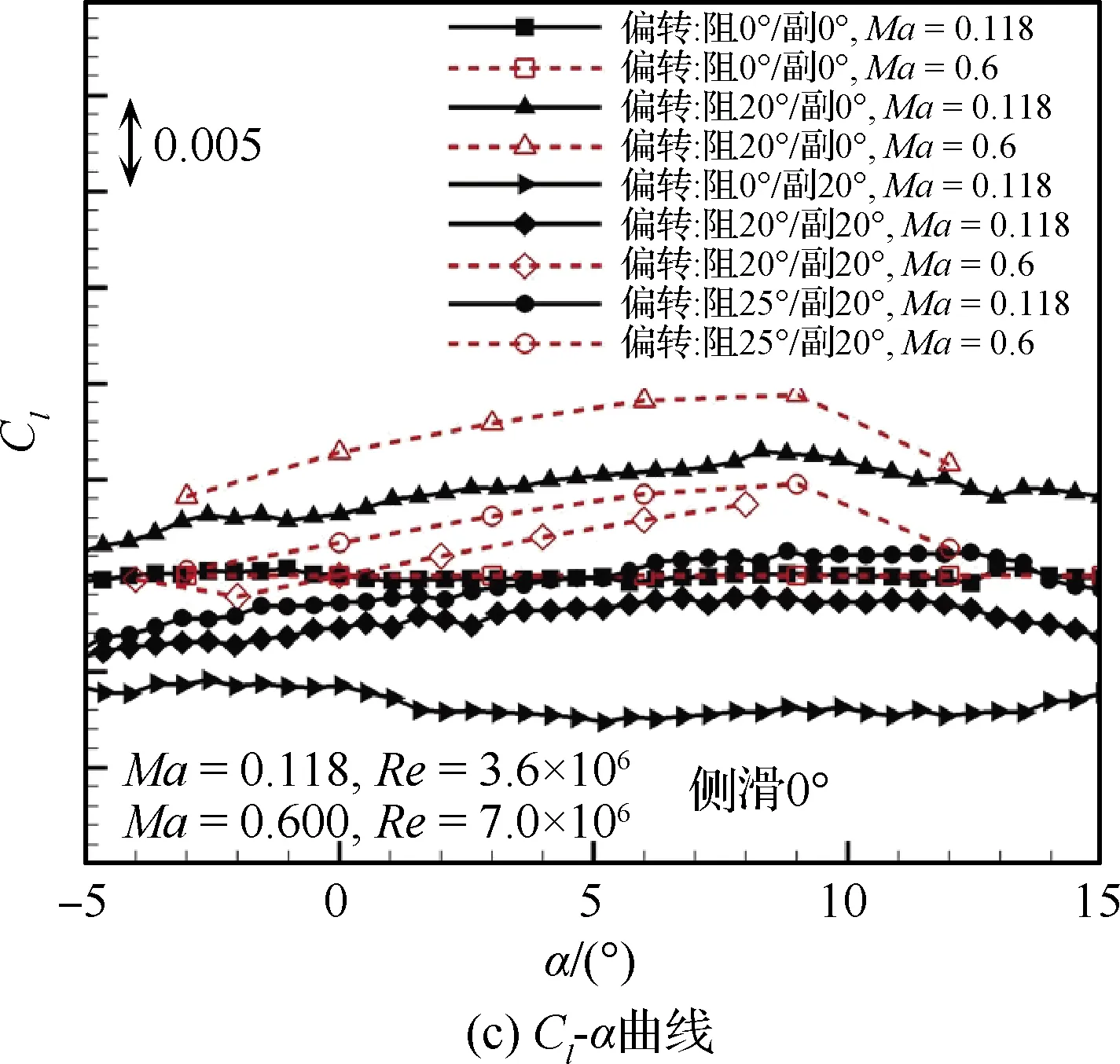
图14 基本构型和4种方案的力矩特性对比
表1给出了4种方案在Ma=0.118、α=7°和Ma=0.6、α=3°时的舵效以及与纵横向耦合程度,与纵横向耦合数据为该状态Cn值的倍数。

表1 4种方案力矩数据对比
表1进一步表明:25°/20°组合舵和20°/20°组合舵的力矩特性各具优势,低速时25°/20°组合舵特性占优,高速时20°/20°组合舵特性占优,若兼顾高低速,需在这两种组合方式中折中。因此,选取嵌入式阻力舵与后缘副翼的舵偏角角度差在0°~5°之间的组合舵方案作为该布局的航向控制措施是有效可行的。
图15和图16分别给出了Ma=0.118、α=6°时基本构型和4种航向控制方案的空间流场对比以及在舵中心附近的截面压力系数Cp分布对比。结合两图,分析了基本构型、单独副翼偏转、单独阻力舵偏转、组合舵偏转等情况下的流动现象,揭示了舵面偏转带来的三轴方向力矩变化机理。
气流通过基本构型时完全附着于物面,没有出现分离;机翼前缘上表面由于气流的绕流加速而形成了较宽区域的负压区,这是贡献升力的主要部位;考虑飞翼布局俯仰力矩的约束要求,该机翼采用了反弯翼型,机翼后缘附近的上表面压力值大于下表面压力值,产生了负升力。
副翼下偏20°时,增大了当地翼型的弯度,机翼上表面负压区域扩大,从压力分布来看,几乎上表面都是负压区,相比于基本构型,上表面负压量值增大,下表面正压值也增大,且机翼后缘附近由负加载变成了正加载,整个弦向都贡献了有效升力,机翼总升力增加;整个机翼都位于重心之后,升力的增大引起了较大的俯仰力矩变化,相比于基本构型,机翼后缘附近提供的升力比重更大,使得俯仰力矩变化程度更加严重,同时,单侧升力增大,耦合产生的滚转力矩变化也很大,因此副翼对纵横向力矩影响很大;副翼舵面偏转角度较大时,使得当地翼型抑制流动分离的能力减弱,副翼上容易出现分离现象,加之展向流动通过舵端面间的剪刀缝流至副翼上表面,加剧该处流动分离,舵效影响加重;副翼本身能够产生一定的阻力,但由于机翼前缘负压峰值增大等因素导致机翼产生了相比于基本构型的更大向前吸力,抵消了一部分副翼产生的阻力,使得单侧机翼总阻力增量小,导致航向控制能力弱。
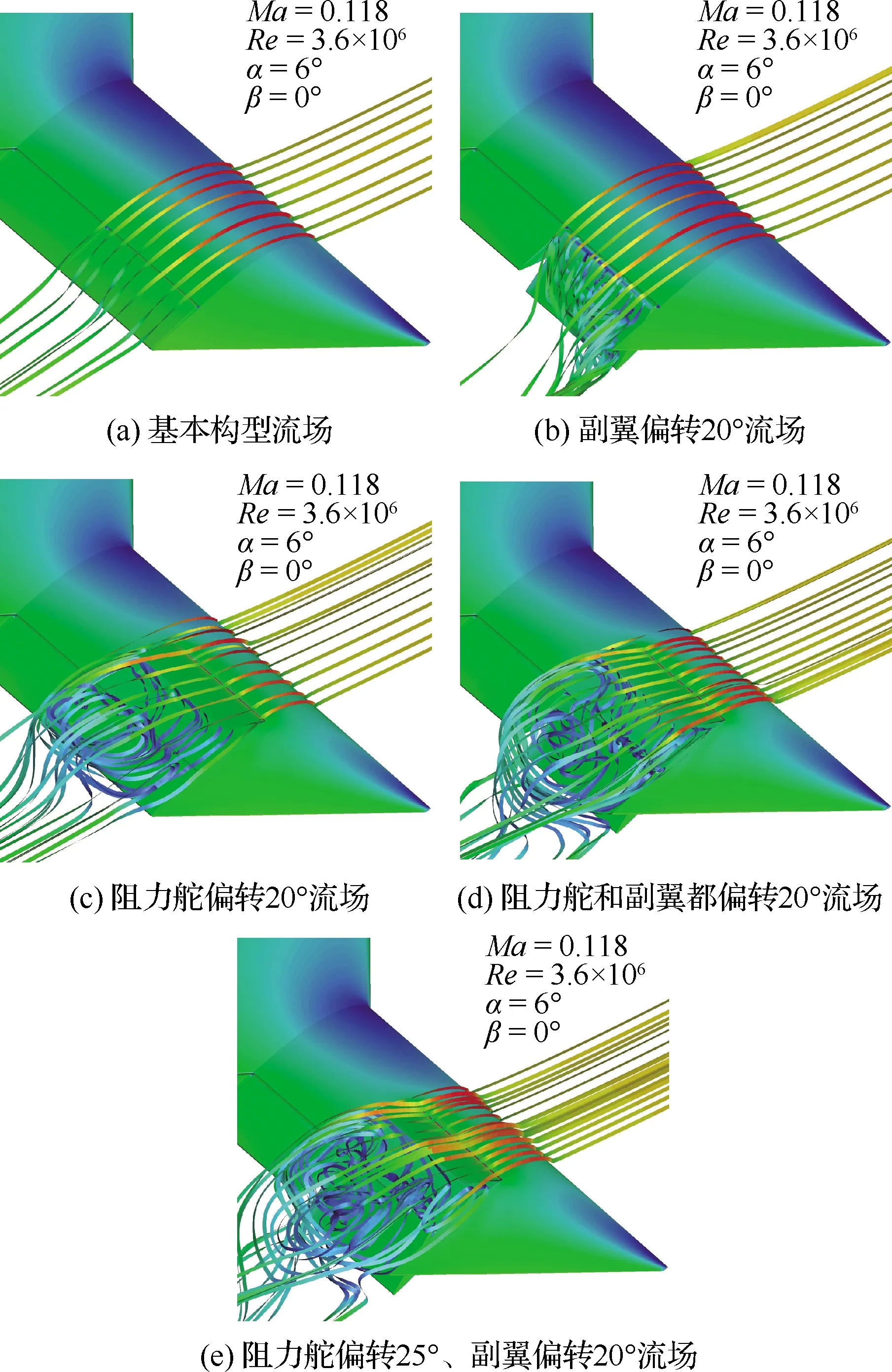
图15 基本构型和4种方案空间流场对比
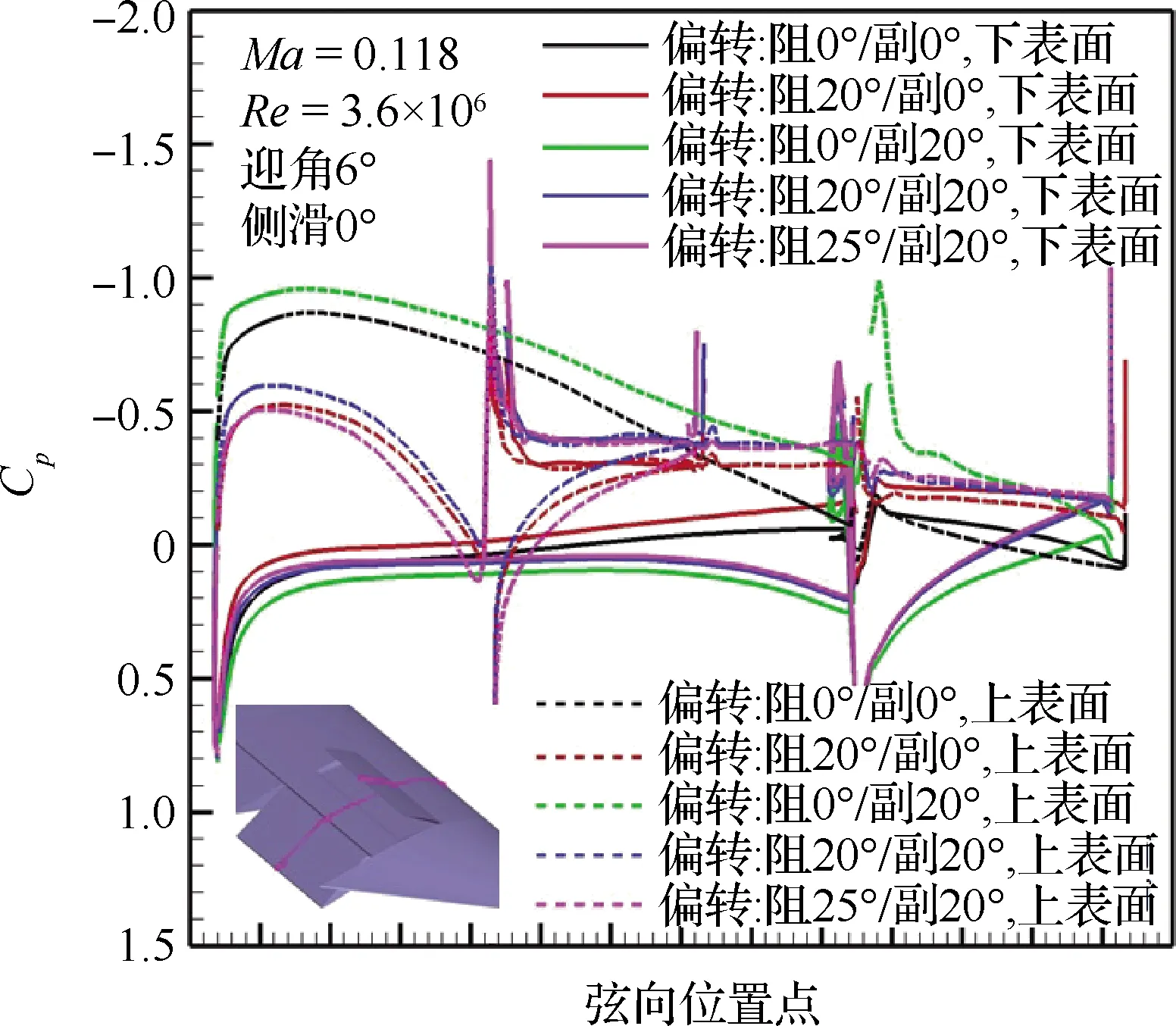
图16 基本构型和4种方案截面压力分布对比
阻力舵上偏20°时,阻力舵增大了迎风面面积,阻碍了机翼前缘附近上表面的流动,速度减小,压力明显升高,负压量值显著减小,越接近阻力舵前缘处,机翼上表面的负压量值变化越剧烈;阻力舵直接阻碍流动,其迎风面上速度降低,压力明显升高,且沿流向压力量值向负压方向变化很快,在较短距离内由正压值变为负压值,但整个迎风面的压力值都比背风面压力值大,产生较大压差阻力;气流从阻力舵两侧向其背风区填充,形成了分离涡,导致舵后分离区域内阻力舵的背风面和机翼上翼面的压力保持不变;受分离涡诱导,机翼下翼面气流上洗加速,整个下翼面压力降低,越靠近机翼后缘,压力降低程度越明显;上述流动现象表明,机翼上表面阻力舵打开前后,压力分布的复杂变化,导致阻力和升力变化都大,产生较大偏航力矩的同时,伴生的纵横向力矩变化也较大。
组合舵面偏转后,其流动特征是阻力舵单独偏转时流动特征和副翼单独偏转时流动特征的耦合与加强;机翼上表面以阻力舵干扰占主导,其压力分布形态与阻力舵单独偏转时的压力分布形态一致,整个上翼面负压量值相比于阻力舵单独偏转时的负压量值有所增大,机翼下翼面以副翼变弯度占主导,其压力分布形态与副翼单独偏转时的压力分布形态一致,整个下翼面压力相比于副翼单独偏转时的压力有所减小,但比阻力舵单独偏转时的压力增大较多;阻力舵偏转和副翼偏转都起到增阻的效果,航向控制能力加强,副翼偏转带来的较大升力增量,一定程度抵消了阻力舵偏转带来的升力损失,使得总升力变化较小,因而减小了航向与纵横向力矩耦合程度。
4 模飞试验验证
试验中航向控制舵采用的是操纵和控制律设计相对简单的嵌入式阻力舵与后缘副翼同角度偏转的组合舵,通过动态预置舵偏角的方式避开舵效特性非线性区。模飞试验整个飞行过程平稳,有效验证了三轴方向控制舵解耦设计方案和飞行操控策略的合理性。
图17给出了模飞试验中测量的迎角α、高度h、侧滑角β、马赫数Ma、升降舵偏角δe、滚转舵偏角δl、左组合舵偏角δlr、右组合舵偏角δrr随时间的变化曲线。
当有侧滑角时,依靠左组合舵与右组合舵的舵偏角角度差(|δrr-δlr|)产生的偏航力矩来实现航向姿态控制。阻力舵打开后,产生了耦合力矩ΔCm和ΔCl,从δl和δe曲线看,在滚转舵与升降舵舵容量相当情况下,升降舵舵偏角δe明显大于滚转舵舵偏角δl,说明耦合的|ΔCm|大于耦合的|ΔCl|,在组合舵舵容量大于滚转舵、升降舵舵容量的情况下,δl和δe依然明显远小于|δrr-δlr|,说明耦合的|ΔCm|和|ΔCl|远小于阻力舵产生的|ΔCn|。
表2给出了8个测量变量在图17所示范围内的最大值、A点值和B点值。A点代表低速特性,迎角5.61°时依靠|δrr-δlr|=3.3°能够有效控制2.8°侧滑角;B点代表高速特性,迎角2.78°时依靠|δrr-δlr|=12.4°能够有效控制8.5°侧滑角;高低速下所需的|δrr-δlr|只有所需控制侧滑角的1.1~1.5倍,说明航向控制舵效高,同时,纵横向配平舵偏角需求较小,说明阻力舵打开后与纵横向产生的耦合效应很小。
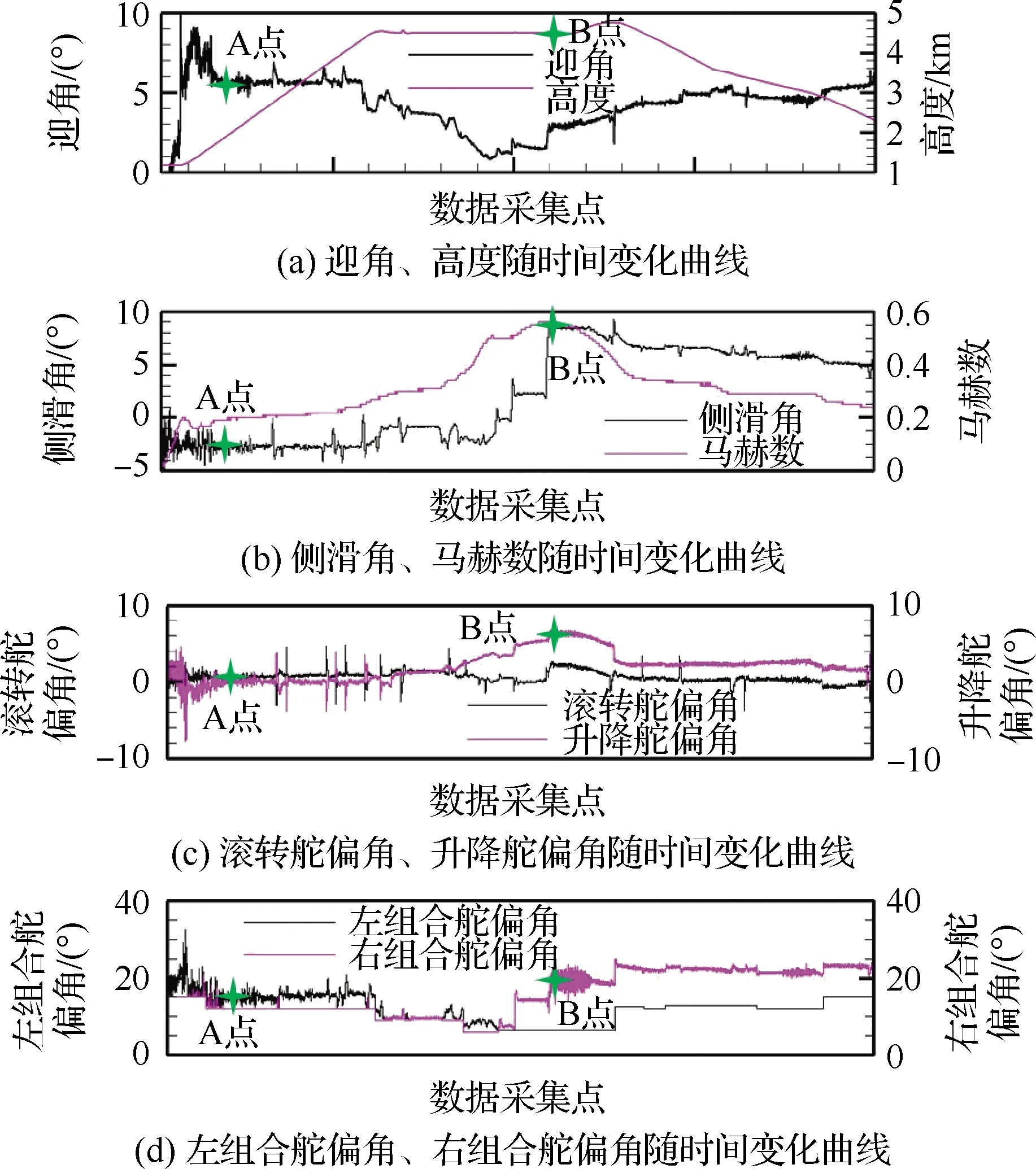
图17 模飞试验数据

表2 模飞试验数据对比
模飞试验数据呈现的舵面操纵特征,与前面的理论分析一致,有效验证了基于CFD和风洞试验数据得出的分析结论。
5 结 论
1) 运用CFD、风洞试验和模飞试验3种研究手段相互支撑、相互验证的综合研究优势,真实有效地验证了组合舵低/高速下高舵效低耦合的航向控制特性。
2) 单独嵌入式阻力舵航向舵效高,单独副翼的航向舵效很低,两种舵单独偏转时都与纵横向强耦合,一般不作单独使用。
3) 嵌入式阻力舵与后缘副翼组成的组合舵航向控制能力强,选取阻力舵与副翼的舵偏角角度差在0°~5°范围的组合舵作为该布局的航向控制方案,能够达到增阻定升效果,能显著地消弱与纵横向的耦合程度,从而实现舵面解耦设计。
4) 无论单独舵,还是组合舵,舵偏角在0°~6°范围内时其力矩特性变化的规律性较差,控制律设计困难,建议通过预置舵偏角或舵偏操纵速率大于姿态响应速率的快速偏转方式来避开此区域。
5) 阻力舵与副翼呈近距强干扰状态,阻力舵的位置、大小、形状,甚至与机翼间的缝隙都对其后的副翼有影响,需要深入研究流动机理和影响规律,同时,结合飞行控制律的设计,需要深入研究该航向控制策略在高亚声速和超声速下的航向控制有效性。
致 谢
感谢CARDC数值计算团队肖中云、崔兴达等同志给予相关计算数据支持,感谢风洞试验团队黄勇、金玲等同志给予相关风洞试验数据支持,感谢模飞试验团队毛仲君、刘进、魏建烽等同志给予模飞试验数据支持。