基于效能的先进战斗机航电系统动态重构方法
2020-07-08赵长啸何锋李浩王鹏
赵长啸,何锋,李浩,王鹏,4,*
1. 中国民航大学 适航学院,天津 300300
2. 光电控制技术重点实验室,洛阳 471009
3. 北京航空航天大学 电子信息工程学院,北京 100083
4. 中国民航大学 民航航空器适航审定技术重点实验室,天津 300300
随着军事技术、通信技术、高性能计算技术的发展,以信息系统支持的智能化网络中心战(Network-Centric Warfare)和空天一体化成为未来航空装备的主要作战样式[1],仅仅依靠高性能的武器平台已无法获得军机对抗的胜利,需要提高战斗机的超声速巡航、隐身、超视距和多目标攻击、高机动性和敏捷性以及联合作战、协同作战、机动作战等综合能力[2],无论完成何种作战能力需求,均需要强大的航空电子系统的支持,因此新的综合化航电技术、高性能计算芯片、软件定义系统成为各国军机重点发展的领域[3]。
航空电子系统作为战斗机的“大脑”,其对资源的配置和管理能力直接关系航电系统性能[4],从而影响战斗机的作战能力。在联合式航电系统中,航电功能仅可使用固定配置的资源[5],当部分硬件资源失效时会导致航电功能的降级或失效。为了提高资源利用率和系统的抗毁性能,在综合模块化航电系统中提出了共享资源的概念,系统可以管理多种配置构型以应对不同的任务环境,如北约标准组织发布的STANAG 4626,在系统管理中引入了蓝印的概念[6],以对多种配置方案进行管理,此方式中系统构型配置文件为离线生成,难以适应复杂多变的战场需求,因此可重构的柔性航电系统开始备受关注,依据不同阶段作战任务对不同航电系统功能的需求动态配置资源,提高各阶段关键航电能力的突出优势。如美国海军2015年以种子基金的形式开展了联合航空电子可重构虚拟信息系统(Joint Avionics Reconfigurable Virtual Information System,JARVIS)项目[7],以进一步提高航电系统的小型化、容错等能力,2018年JARVIS项目获得了美国空军和海军超过3 200万美元的经费支持[8],进一步研究系统的重构特性、分布式处理特性和网络安全防护,计划2023年技术成熟度(Technology ReadinessLevel,TRL)达到TRL8。
针对航电系统的动态重构特性,开展重构策略方法的研究。航电系统设计是在有限的资源、空间中为不同航电功能分配资源[9],以实现整体的效能最优,针对该问题各国专家学者提出了诸如以节能[10]、最小化通信代价[11]、风险均衡[12]目标等设计方法,以优化航电系统整体能力。本文分析了航电系统的重构触发条件,针对下一代机载综合化航电系统的重构需求,在分析军机作战需求的基础上,提出了以最大化全飞行阶段航电系统对任务支撑能力的面向效能的航电重构决策方法。
1 不同类别作战任务航电系统需求分析
1.1 作战区边界
作战飞机是实施空中打击的重要作战平台,其性能水平的高低代表了一个国家的国防实力。在军机实际研制过程中,需要根据军机探测能力、威胁能力及导弹能力,来界定作战区边界,划分作战任务。以F-22飞机为例[13],其作战全过程包括5个边界,分别为态势感知边界、攻击/回避区边界、超视距识别、威胁回避区边界及威胁遭遇区边界,作战区边界如图1所示。

图1 F-22飞机作战区边界
在不同的作战区,飞机执行的主要任务不同,如态势感知边界附近,军机主要任务是通过雷达、红外探测与跟踪系统、电子战系统协同探测,进行初始跟踪与识别,此时的主要任务是通信、导航与识别以及低精度跟踪;攻击/回避区边界,飞行员需根据目标优先顺序及作战要求,做出攻击/回避决策,并展开中精度跟踪识别;超视距识别边界,即发射区边界,主要任务是展开火控级精度跟踪,并展开超视距作战与电子战,进行先进中距空空导弹投放与电子频谱争夺。若后敌发现,进入威胁回避区边界,主要任务是防御,推迟被威胁攻击,并全面启动电子战与武器攻击系统;进入威胁遭遇区边界,则全面展开对抗与挫败威胁的进攻。
1.2 航电系统能力需求
不同的作战任务有不同的航电功能需求侧重,例如态势感知边界以外,要求强大的探测功能以达到先敌发现的目的;而在威胁遭遇边界以内,则对操纵性、火力控制性能的要求更高。即使对同一类别航电功能,不同作战任务的需求程度也存在差异,如对于跟踪与识别功能,在态势感知边界低精度的跟踪即满足任务需求,而进入到超视距识别边界,则需要提供火控级别的精度,以保证打击的准确度。本节分析了不同飞行任务阶段,对于航电系统能级及航电资源的需求[14],如表1所示。
2 基于效能的航电系统重构策略
2.1 系统重构技术基础分析
随着技术的发展,飞机航电系统向着综合化、模块化方向发展,由联邦式航电系统向综合模块化体系结构演进,采用通用高性能处理平台加载功能软件的形式实现不同的航电功能,为进一步系统动态重构提供了技术基础[15]。如图2所示的联合式航电系统[16],各航电功能采用独立的设计,航电系统功能与资源一一绑定,当功能A失效后,航电系统的体系结构特征决定了无法利用其他功能的资源对功能A进行重配置。
而对于如图3所示的综合模块化航电(Integrated Modular Avionics,IMA)系统[17],各航电功能采用驻留应用(Host Function,HF)的方式共享航电平台[18],而是给多功能间共享、重用资源提供了技术基础。
综合化航电系统中航电功能与硬件资源不再一一对应,而是依据系统需求对各不同航电功能所需资源进行动态配置,如图4所示。

表1 不同任务的航电系统能力需求
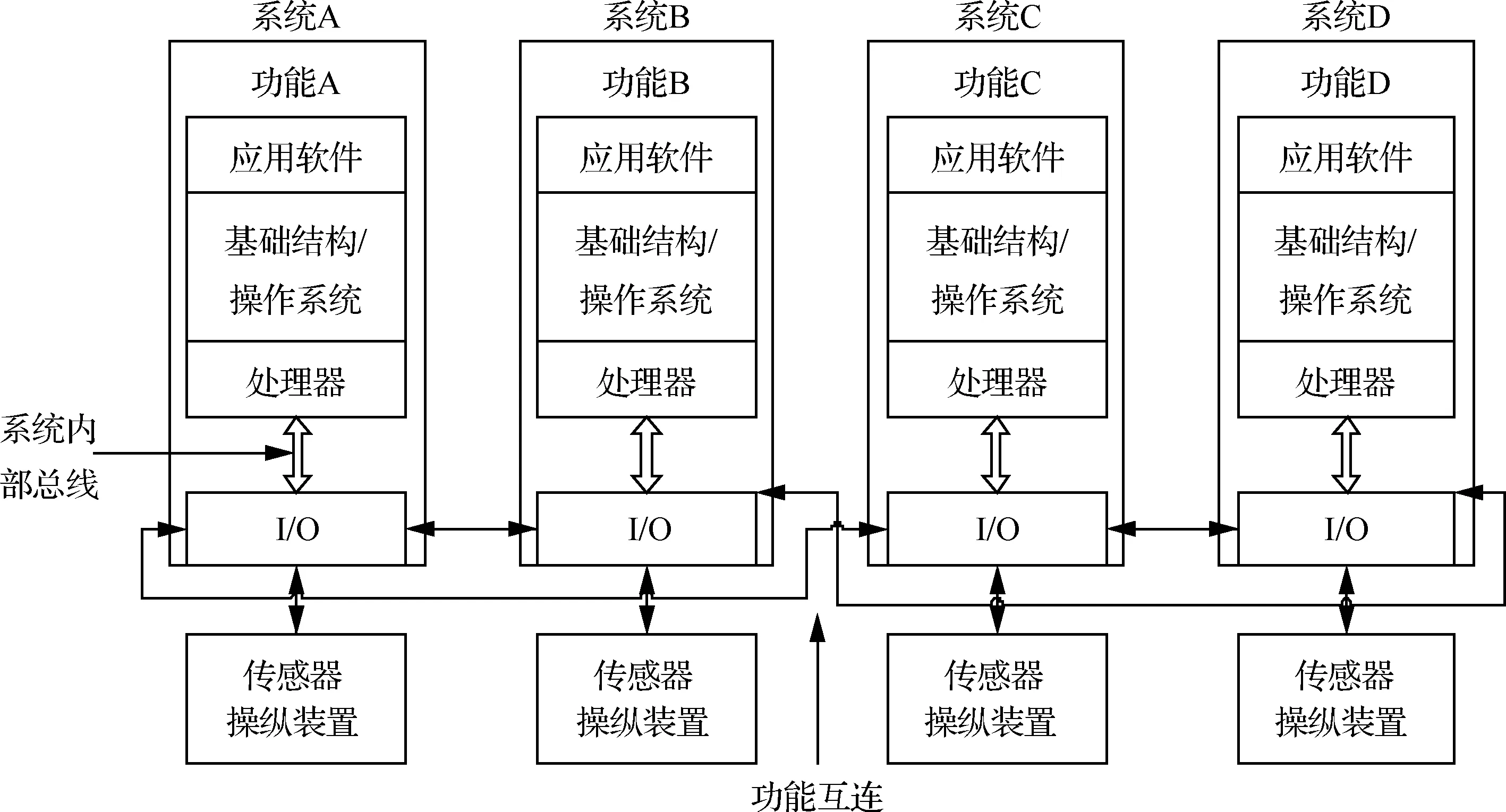
图2 联合式航电系统架构[16]

图3 综合模块化航电系统架构[17]
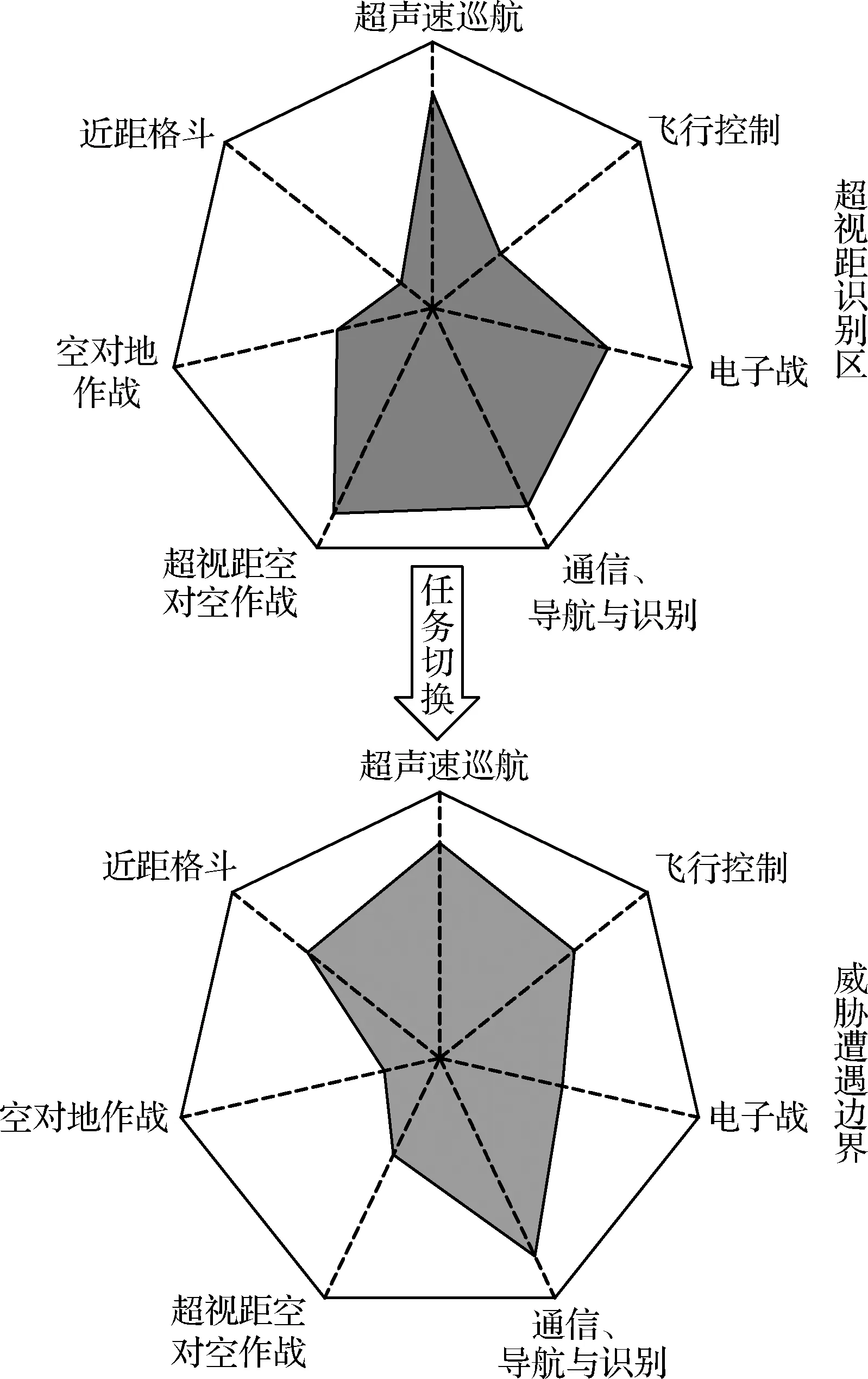
图4 不同阶段不同类别航电需求差异
在超视距识别边界内,航电系统需求主要集中于识别、电子战和超视距空战等功能,当进入到威胁遭遇边界后,战斗机对于近距格斗相关的航电功能需求更高,因此动态航电系统需要调整不同类别航电功能对于硬件资源的占用情况,实现任务(应用)-功能(能力)-资源(设备)配置(Configuration)的改变,如图5所示,提高阶段任务的航电系统支撑能力,实现全飞行阶段的总体能力提升。
另一方面,现有的综合化航电系统中,如文献[19]引用的ARINC 651标准定义的航电系统架构中,定了航电系统级的状态监控(Health Management,HM)、故障管理(Fault Management,FM)和配置管理(Configuration Management,CM)单元,也为航电系统资源的动态配置提供了标准基础,通过在这些单元增加重构决策逻辑来实施系统的重构配置,本文提出的重构设计具有一定的可实施性基础。
2.2 航电系统效能
航电系统作为支撑飞行任务、作战任务的系统,难以直接评价其对任务的效果和影响,论文采用效能作为其能力的度量参数。效能是一个内涵、外延都十分丰富的概念[20],效能的一般定义为:一个系统完成一组特定任务要求程度的能力(度量)。对于航电系统其效能表现为对不同航电任务的支持程度,进而对作战、生存能力的支持[21]。


图5 航电系统任务资源重构

(1)
即只有航电系统对任务mj分配的资源R_ali大于其最低资源需求Rj时,才有效能贡献,效能与投入资源相关,关系函数为g(·),如对于识别与跟踪功能,投入不同的资源可带来不同精度的跟踪能力,体现为不同任务的支撑效能。由于边际收益递减效应的存在,g(·)应为一个凸函数,即对某一项任务多投入资源,可以带来效能的提高,但是随着资源投入的增加,收益变小。
定义航电系统的整体效能为
(2)
式中:ηj为不同任务对整体系统效能的贡献系数,通过调整ηj值,可以有效区分在不同场景下,各任务的效能贡献重要程度。如在超视距识别边界内,敌我识别、电子战和超视距空战等任务的效能贡献大于其他任务,而进入到威胁遭遇边界后,近距格斗的效能贡献最大。
2.3 重构决策流程
本设计基于综合模块航电系统架构,根据不同的飞行任务、飞行阶段、飞机健康状况等标准进行系统重构时机的判别、重构资源配置范围和配置方式的确定,按照重构的目标配置方案并进行有效性检查,以实现航电系统对动态能力的响应,重构决策流程如图6所示。重构决策流程主要包括决策信息收集、重构决策触发、重构策略选择和重构执行等过程。
2.3.1 决策信息收集
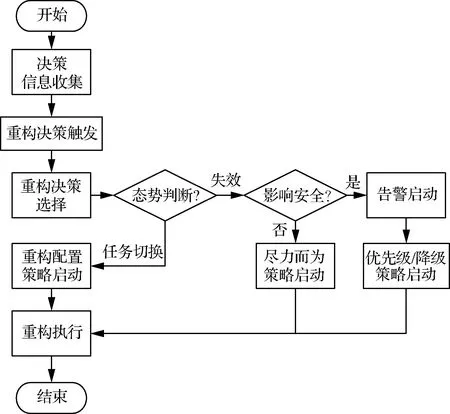
图6 重构决策流程
信息收集主要包括态势信息和航电系统状态信息2大类。态势信息主要为获取作战区边界信息、敌我状况信息,以确定不同任务阶段对航电功能的需求;航电状态信息主要包括对系统可用资源的监控、故障状态收集等,这些信息作为重构决策的输入,为后续重构策略选择和重构执行奠定基础。
2.3.2 重构决策触发
重构执行需要一定的触发条件,来进入到重构流程,分析机载航电系统重构需求,主要包括2类:
1) 战斗任务切换,此时重新为不同航电功能部署资源,提高某一阶段内所需航电能力。
2) 战斗受损,调整航电系统资源配置方案,保证战斗机的飞行安全或提高战斗机当前阶段的任务执行成功率。
或是以上2种触发条件的组合,当航电系统检测到以上情况条件时,开始进行重构。
2.3.3 重构策略选择
依据不同的系统可用资源条件及当前的作战任务情况,系统可以选择不同的重构策略,依据触发条件不同,设计了2种不同的重构策略。2种策略依据资源的完备程度及各阶段任务对不同类别航电功能的需求程度,重构“任务-资源”的配置关系,实现航电功能对阶段任务支撑的最大化和对飞行安全的保证。
1) 面向任务的重构决策机制
该重构决策是以满足各航电系统基本功能需求的前提下,最大化当前飞行任务重要航电系统功能能力为目标。如在超视距识别边界内,航电系统将主要资源集中于识别、电子战和超视距空战等功能,当进入到威胁遭遇边界后,系统采用基于任务的重构,将资源更多地部署在近距格斗相关的航电功能,在不改变整体航电资源数量的条件下,提高各任务阶段的作战效能,实现全阶段的对敌压制与攻击。
2) 面向安全的重构决策机制
该重构决策机制关注于当部分航电系统资源失效时,优先对关系到飞行安全性的航电系统进行资源配置,保证飞机的飞行安全,降低战斗损失,最大限度保护战斗机及飞行员。如图7所示,对于通用功能模块(Common Function Module,CFM),当部分资源失效后,可以采用对非安全关键系统进行降级或关闭,将相关资源配置给安全关键/战斗关键航电功能。
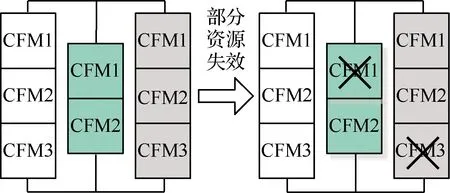
图7 失效重构
2.3.4 重构执行
重构执行模块根据不同的重构策略进行资源动态能力响应的预配置,在不同航电功能间重新分配系统资源,在动态能力响应方案中的配置时间到来时,将配置信息加载到IMA各分区,完成系统动态重构。
3 动态重构航电系统模型
3.1 系统重构假设
动态重构特性使得航电系统能够按需配置资源,提高了系统的灵活性,本节重点分析重构特性对效能的影响。为了简化分析,对航电系统重构行为进行如下假设。
假设1重构决策系统是失效免疫(Failure-free)的,即重构决策系统可靠度为1。
假设2重构决策时计算配置方案所需的系统资源与航电系统功能执行所需资源间是独立的。
假设3重构决策过程及重构配置时间是足够小的,不会导致各航电功能中断,从而影响航电功能能力。
3.2 航电系统资源量化
对航电系统的能力进行量化是进行资源重配置的前提,实际的航电系统中包含不同类别的模块单元,如F-22的中央综合处理单元(CIP)包含12种不同的资源模块(LRU),而各类别LRU所能提供的资源能力不同,为此,将IMA系统可以提供的资源简化为以下3类[22]:
1) 计算资源,包括中央处理器、传感器前端处理器。
2) 存储资源,包括分区应用的运行内存、分区应用的数据存储器以及分区应用的配置存储器。
3) 通信资源,包括通信链路、虚拟链路、通信端口和信誉值。
假设IMA系统包含q种不同类别的资源模块(LRU),各资源模块均包含不同能力的计算、存储与通信资源,而每种模块可提供的资源能力为
Cq=[comq,calq,memq]
式中:comq表示q类模块可以提供的通信能力,以每秒传输字节数(bps)作为其数据传输能力评估单位;calq表示q类模块可以提供的计算能力,以秒钟执行的百万指令数(Million Instructions Per Second,MIPS)作为其计算能力的评估单位;memq表示q类模块可以提供的存储能力,以比特(bit)作为其存储能力评估单位。
3.3 重构策略建模
航电系统的资源配置、重配置过程,是在一定的目标和约束条件下,航电系统资源在多个任务间的分配[18]:
A:M→E
(3)
A在数学问题上可以模型化为带约束的目标优化问题。
对于基于任务的重构策略,其目标为最大化不同作战区的航电系统效能,即
对于基于安全的重构策略,其目标是保证对于一些安全关键系统,其分配的资源满足最低资源需求,即
同时,在对多任务进行资源分配过程中,还存在一定的约束:
1) 唯一性约束
为了简化计算及符合实际系统需求,假设航电任务仅能分配到单一模块,不可多模块合作完成某一任务;但是多任务可以分配到单一模块,只要该模块的资源能力满足多任务要求。
(4)
2) 资源约束要求
即分配到各模块上的任务,其资源需求要小于模块的实际能力。
通过构建优化目标和优化约束,可以引入成熟的优化算法进行多模块间的航电资源分配,并计算对应分配结果的航电系统效能。
4 实 验
为了分析重构能力为航电系统效能带来的影响,本节在3.2节构建的航电系统整体效能模型及资源量化模型的基础上,进一步构建效能贡献系数矩阵、资源分配矩阵及效能优化函数,并通过实验对比分析,得出相关结论,论证航电系统重构能力的优异性。
4.1 效能贡献系数矩阵


本文中采用F-22飞机的定义,首先,对飞机5个作战区边界进行编号。A为态势感知边界;B为攻击/回避区边界;C为超视距识别;D为威胁回避区边界;E为威胁遭遇区边界。然后,对7种主要任务进行编号。Ⅰ为超声速巡航;Ⅱ为通信、导航与识别;Ⅲ为飞行控制;Ⅳ为电子战;Ⅴ为超视距空对空作战;Ⅵ为空对地作战;Ⅶ为近距格斗。本文综合考虑不同作战区边界内的任务需求,设置的效能贡献系数矩阵为

4.2 任务最低资源需求矩阵
针对系统每种子任务,给出系统资源需求矩阵。为了方便数据处理,采用了多量纲归一化方法。表2给出系统计算、存储、通信资源量化数值,表示每项子任务mi对每种类型资源的最低需求。
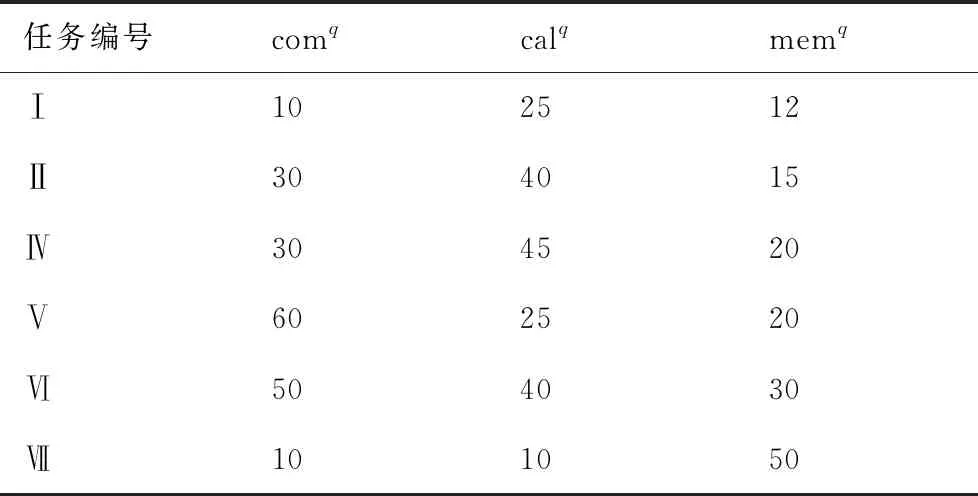
表2 不同任务最低资源需求
4.3 航电系统资源能力矩阵
航电系统平台的资源能力,表示系统中可分配的资源情况,按照实际航电系统的设计,IMA平台中由不同性能的模块构成,为了简化计算,将各模块的参数进行了量纲的归一化,实验平台中配置了4种类型的模块单元,各模块能力各有偏重,资源能力如表3所示。

表3 系统配置模块资源能力
4.4 效能分析
本节讨论在以上参数设置下的静态配置航电系统与动态重构航电系统的效能分析。其他一些必要参数设置如下。
效能与资源的关系函数,对所有的任务统一设置为g(·)=lg(·),该函数符合实际系统中资源投入边际效应递减的趋势特性。重构算法采用线性规划算法,通过检查资源分配算法对约束符合性来满足约束条件。
对于采用静态配置构型的航电系统,各任务的资源配置结果如表4所示。对于动态配置系统,不同作战区边界其配置资源情况不同,具体的分配结果如表5所示。
针对不同类别的航电系统计算其效能,并假设当某一任务分配到某一模块上时,若无其他任务,则该任务可使用该模块的全部资源;当多任务共享式单一模块时,超出最低资源需求的部分,多任务间共享。对比效能结果如表6所示。
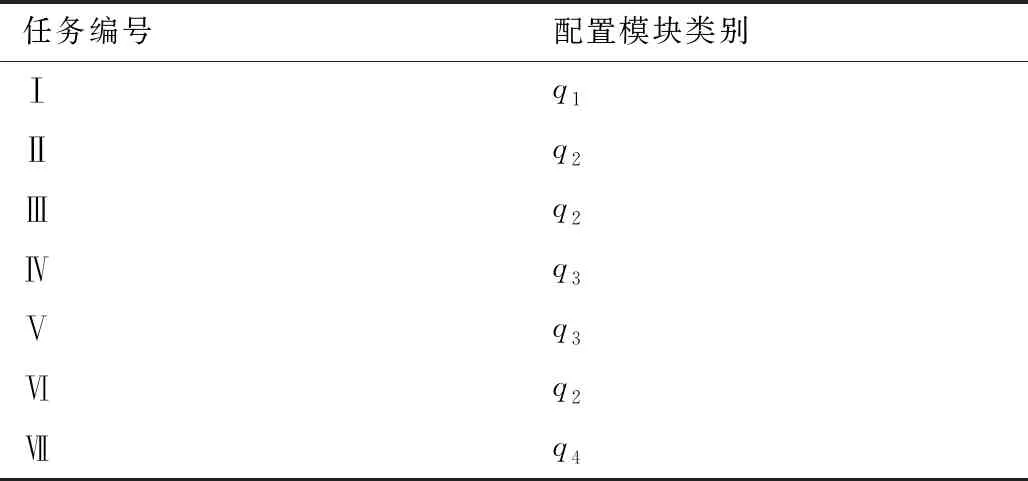
表4 静态航电任务分配结果
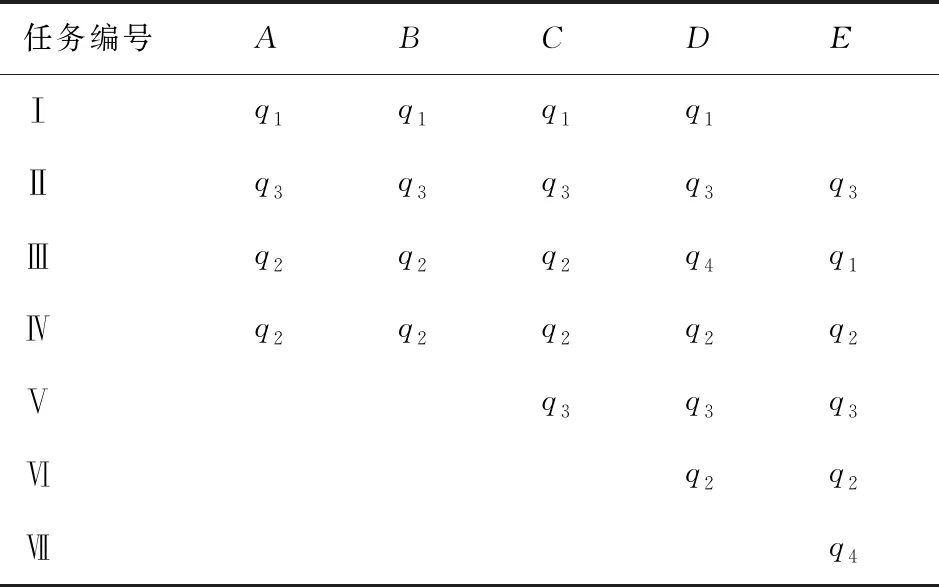
表5 动态航电任务分配结果

表6 作战效能对比
可见,对于各个作战区边界内,动态重构航电系统的效能都高于固定配置的航电系统,这个结果的原因是动态重构特性可以依据不同作战区边界的任务需求,动态调整各资源的分配,如在一些阶段,将对效能贡献为0的任务完全屏蔽,从而有效集中优势资源以更高的性能完成当前任务。
5 结 论
1) 分析了未来战机对动态重构航电系统的需求,建立了航电能力与不同战斗任务的支持关系。面向不同战场环境,设计了面向任务和面向安全的重构策略。
2) 给出了航电系统效能模型,设计实验比较了在相同环境与相同航电资源条件下,动态重构航电系统与静态配置航电系统的效能,表明通过动态重构特性的引入,可以有效提高作战效能。
后续计划针对重构系统的可靠性模型、动态重构方法的实时性及动态分区可信性等问题开展进一步研究。
