探测器阵列靶的激光光斑图像复原方法研究
2020-07-07程乙轮谭逢富王振东秦来安张巳龙侯再红
程乙轮,何 枫,谭逢富,王振东,秦来安,靖 旭,张巳龙,侯再红
(1.中国科学院安徽光学精密机械研究所大气光学重点实验室,安徽 合肥 230031;2.中国科学技术大学,安徽 合肥 230026)
1 引 言
激光在大气中传输时由于受到湍流、热晕和消光等因素的影响,激光器出口处激光功率密度分布与远场光斑功率密度有较大的差异[1]。准确测量激光远场光斑时空强度分布是直接获取激光光束质量、激光到靶能量和光斑质心漂移等重要参数的有效手段,对于分析强激光在大气中传输效应研究和评价强激光系统的光束控制能力、瞄准能力等具有重要的意义[2]。
目前,对于远场激光的光斑能量分布测量方法主要是摄像法和阵列探测法[3]。摄像法采用非接触式测量,具有结构简单,易于获得高分辨率的光斑图像等优点,但较难实现对光斑空间分布的定量测量,仅适合于激光光斑相对空间分布实时测量[4]。阵列式探测法不受时间限制,具有精度高、实时性好等特点,在对激光器性能的测试中应用十分广泛。其缺点为需要采用大量的探测器对远场光斑进行采样,而且对探测器的均匀性和稳定性有较高的要求。
特别是在对远场大光斑进行测量时,由于靶板仪靶面尺寸大,所需探测器数量巨大,造成研发成本的急剧升高[5]。因此,利用已知采样点光斑数据对光斑实现复原是通过探测器阵列靶获得准确的远场光斑参数不可避免的问题,解决这一问题的关键是寻求一种高精度的插值算法对采样光斑图像进行复原。传统复原方法主要采用最邻近插值算法和线性插值算法,虽然这两种算法能满足阵列靶的实时性要求,但其计算精度低,难以得到准确的远场光斑参数。相比之下非线性插值算法计算精度高,但其复杂的处理过程增大了对时间的需求,难以在实时性较高的环境中得到应用。本文所提出的算法是一种改进型的非线性插值算法,该算法完美的继承了非线性插值算法精度高的特点,同时也极大的缩短了算法处理时间。
2 基于改进型双三次插值算法的光斑复原原理与方法
2.1 探测器阵列法采样光斑复原原理
光电式探测器阵列靶测量系统是利用激光器发射的激光作为测量系统的输入量,通过光电转化模块处理后的数字信号为输出量。光电探测器阵列实现光电信号的转换,光电信号经模块化处理后实现数字化,最终发送至数据处理终端,完成数据处理和分析[6]。测量系统示意图如图1所示,探测器阵列靶靶面探测器分布如图2所示。当激光照射在探测器表面时,探测器将激光能量响应转换成相对应的电流响应,通过对所测得电流进行转化计算得到与采样光斑相对应探测器位置的灰度值g(x,y),最终在数据处理终端得到完整的远场光斑图像。
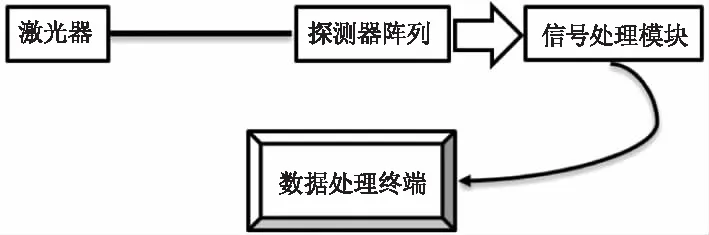
图1 测量系统示意图
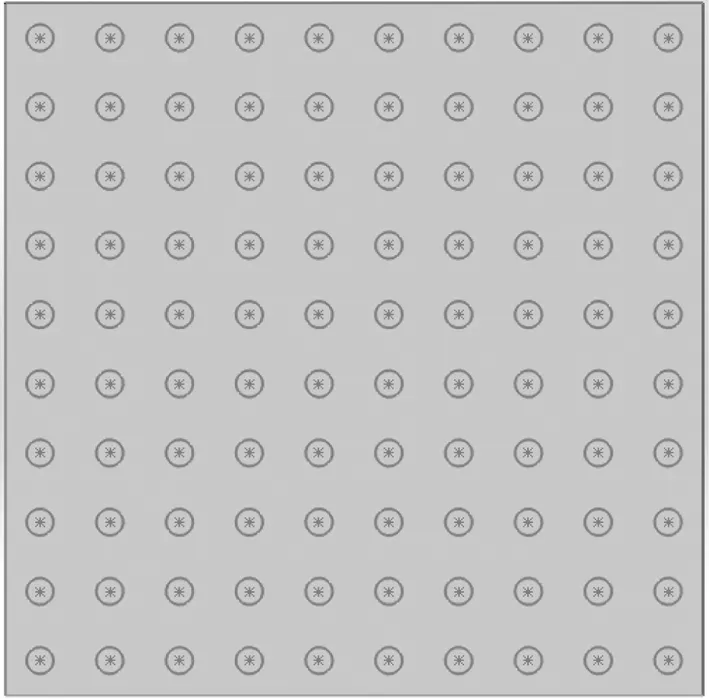
图2 探测器分布示意图
2.2 改进型双三次插值算法原理
由于靶面探测器分布稀疏,所以很难得到准确的激光测量参数。传统的双三次插值算法是利用bicubic核函数对插值点进行拟合计算,bicubic函数如公式(1)所示。该算法最大的优势是充分考虑插值点与原图像周围16个相邻的像素点的权重系数,将插值点坐标分割为整数部分和小数部分,根据周围16个点的像素点距离插值点的位置关系按权重系数将其累加从而得到插值点的灰度值[7],该算法虽然增加了程序处理过程中的复杂性但极大的提高了计算精度。
S(x)=
(1)
式中,常数a一般情况下取a=-0.5;x为插值点与周围点距离的小数部分。假设目标点的坐标为G(i+u,j+v),因该方法考虑到目标点周围16个相邻点的位置关系,则目标点的灰度值可由公式(2)、(3)、(4)、(5)得到。
G(i+u,j+v)=A*B*C
(2)

(3)

(4)

(5)
式中,u和v均为待插值点坐标的小数部分;g(x,y)为原图像对应点的灰度值。对于传统的双三次插值算法在对每个待插值点计算时都要通过公式(1)去计算周围点的权重系数,再通过公式(3)和公式(4)组成新的矩阵最后进行卷积计算得到完整的光斑图像。假设采样光斑分辨率为m×m,插值放大倍率为k,则插值处理后的光斑图像分辨率为(m×k)×(m×k)。那么u和v将各产生k个不同的值,且其取值范围为k-1/k到0。假设k取10,则u={0.1 0.2 0.3 … 0.9 0},所以在确定插值倍率的情况下,首先计算出u和v的取值通过公式(1)、公式(3)和公式(5)计算得到矩阵A和矩阵C,然后在插值处理过程中根据u和v的数值去调用矩阵A和矩阵C中对应的系数,这样就能避免在对每个点进行插值的过程中不断调用外部函数而造成计算时间的增加,在保证计算精度的同时有效的提升了插值处理时间。
3 仿真实验
Step1:利用MATLAB生成一幅分辨率为100×100的双高斯分布的光斑图像,如图3(a)所示。根据图2所示的靶面探测器分布示意图对图3(a)所示光斑图像探测器分布情况进行手动降采样得到光斑图像如图3(b)所示。对图3(b)所示采样光斑图像对图像像素点提取重新整合得到整合光斑图像如图3(c)所示。
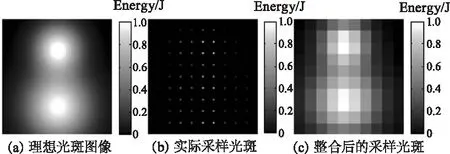
图3 不同阶段光斑图像
Step2:整合后的光斑图像分辨率为10×10,为了复原得到原始光斑图像遂将插值倍率定为10。再分别利用最邻近插值算法和双线性插值算法对整合后的采样光斑图像以10倍倍率进行插值处理,得到插值后的光斑图像如图4(a)和图4(b)所示。运用双三次插值算法以相同倍率进行插值处理得到光斑图像如图4(c)所示。
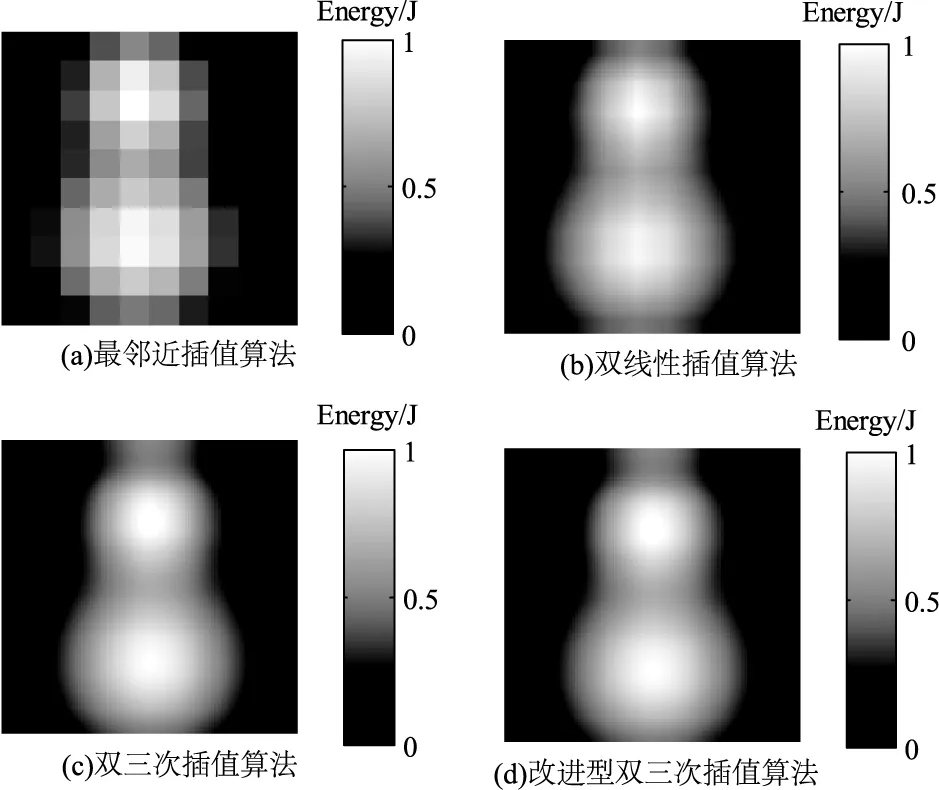
图4 不同算法得到复原光斑图像
Step3:在确定插值倍率为10以后计算双三次插值算法中u和v的值,得到u={0.1 0.2 0.3 … 0.9 0 },再通过公式(3)得到矩阵A如下所示,矩阵C为矩阵A的转置。
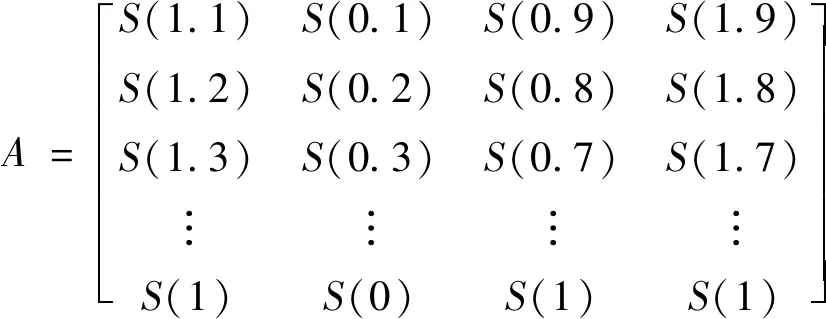
(6)
在完成对矩阵A和矩阵C的求取后根据u和v的值在矩阵中调取相对应的元素进行插值最终完成光斑的复原处理,复原得到光斑图像如图4(d)所示。
4 仿真结果与分析
分析光斑总能量、质心坐标以及光斑环围功率是评价光斑复原方法最直接有效的方法。光斑到靶能量能直接反应激光光束在大气中的传输效应,通过对本文提及的几种不同插值算法得到光斑图像灰度值进行积分即可得到光斑的到总能量[8],在定量计算中令光斑峰值能量为1 J。求取光斑质心主要有:Hough 变换法、重心法、空间矩定位法[9]。重心法是最直接有效的一种方法。即将光斑视为一个实体,光斑图像的灰度值视为光斑质量,通过计算其重心得到光斑的质心方法如公式(7)所示。
(7)
式中,x0、y0分别为光斑x轴方向和y轴方向质心坐标;X、Y为图像x轴方向和y轴方向像素点个数;G(x,y)为图像灰度值。针对不同的算法得到光斑参数如表1所示。
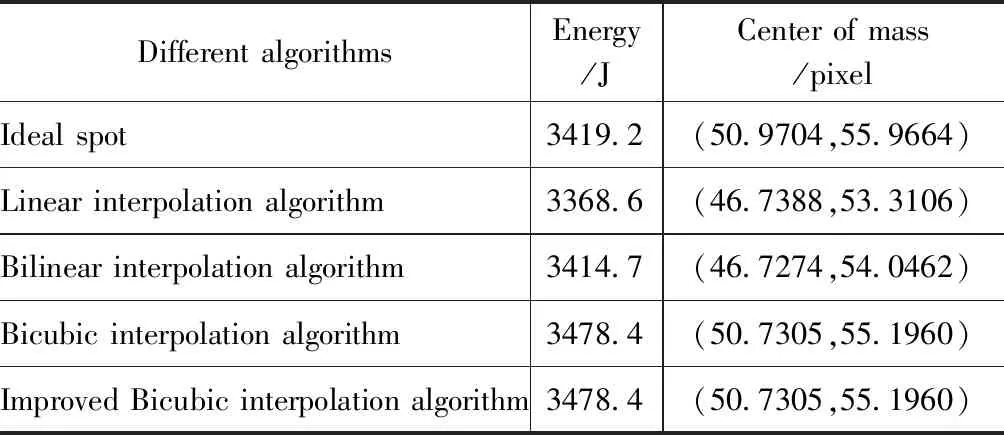
表1 针对不同的算法得到光斑参数
光斑的环围功率是反映激光集中程度的重要参数,对分析激光系统光束控制能力和跟瞄能力具有重要的意义。所以分析对比理想光斑和复原后光斑的环围功率能充分的反映算法的准确性。在求取光斑质心坐标后,以质心点处位置为圆心,则半径为R的环围区域(记为D0R)内的环围功率PR可由公式(8)表示[10]:
(8)
式中,G(x,y)为光斑图像的灰度值。环围功率PR与光斑总能量的比值即为光斑的环围功率比,以环围半径R为横坐标,环围功率比为纵坐标即可绘制出光斑的环围功率曲线。利用不同算法得到的光斑绘制出的曲线图如图5所示。

图5 光斑环围功率曲线
在应用阵列探测法测量光斑参数时,光斑复原算法所需的处理时间也是一个非常重要的影响因素。图6为双三次插值算法和改进后的双三次插值算法在不同插值倍率下所需时间的曲线图。

图6 不同算法在不同插值倍率下处理时间曲线
5 结 论
本文仿真实验所使用的MATLAB为2014版本,PC机处理器主频为2.30 GHz的Core i5-6200U。观察图4可以明显看出利用本文算法所复原的光斑清晰度在本文对比的几种算法中有良好的表现。由表1可以看出本文提出的方法在求取光斑质心坐标时准确性较最邻近插值算法和双线性插值算法在x轴方向上均至少提升7.8 %,在y轴方向上至少提升3.3 %。算法优化前后在不同插值倍率下处理速度至少获得35 %的提升。利用本文优化算法得到光斑的环围功率曲线更接近原始光斑环围功率曲线,在环围功率取63.2 %时运用本文算法计算得到光斑环围半径为34.9 pixel,与理想原始光斑图像相比误差仅为1.7 %。综合上述,本文所提出的算法能提升阵列探测法测量远场光斑参数的准确性,该文为更好的应用阵列探测法提供了一种新的解决方法。