基于Adams的飞机登机桥运动建模与仿真
2020-07-07江子旺冯樱乔宝山杨朝阳
江子旺,冯樱,乔宝山,杨朝阳
(湖北汽车工业学院 汽车工程学院,湖北 十堰442002)
实现登机桥的无人驾驶及自动对接是登机桥行业面临的挑战。登机桥无人驾驶技术的实现需要解决基于机器视觉的飞机舱门识别技术、实时路径规划技术、高精度运动控制技术和智能防撞技术。国内对于登机桥的无人驾驶技术已经开展了相关研究。邓览提出了采用机器视觉对飞机舱门进行识别和定位,并经过特殊处理生成控制指令,与控制系统共同作用完成对接[1-2]。黄健明对智能旅客登机桥进行了研究[3]。在运动规划方面,周佳提出了一种可实现登机桥自动对接的方法[4]。鲍宏杰对自动调平机构的原理进行了阐述,并提出了隐患整改措施[5]。为实现高精度运动控制,实现与舱门的精确对接,运用Adams/View 对登机桥进行建模并进行路径规划,在运动过程中采用传感器技术对主要参数进行实时监控,完成登机桥与飞机舱门的自动对接。
1 登机桥简介
登机桥按通道个数分为两通道式和三通道式,文中研究三通道式登机桥。登机桥结构见图1,从旋转台到飞机方向,登机桥主要由旋转平台、通道、升降装置、行走装置、服务梯、接机口、电缆输送装置、控制系统和安全辅助系统等组成,实现飞机与机场航站楼(固定桥)之间的活动联接,供旅客及工作人员上下飞机。接机过程中,登机桥的旋转平台可在立柱上使登机桥作旋转运动,通道A、B、C 在登机桥前进、后退及转弯过程中作伸缩运动,升降装置可调整登机桥高度,满足舱门高度不同的飞机,行走装置实现登机桥的运动,接机口是可旋转的,在角度允许范围内与飞机舱门对接。在完成对接以后,旅客可从登机口经登机桥直接登机。
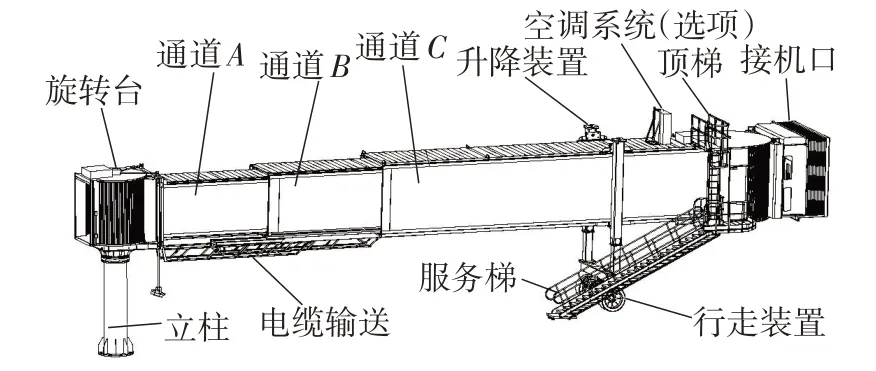
图1 三通道登机桥
登机桥应具有自动减速和触机停止功能。当登机桥与飞机接近时,能自动减速。当其与飞机接触时,能自动停止运动[6]。主要技术参数见表1。
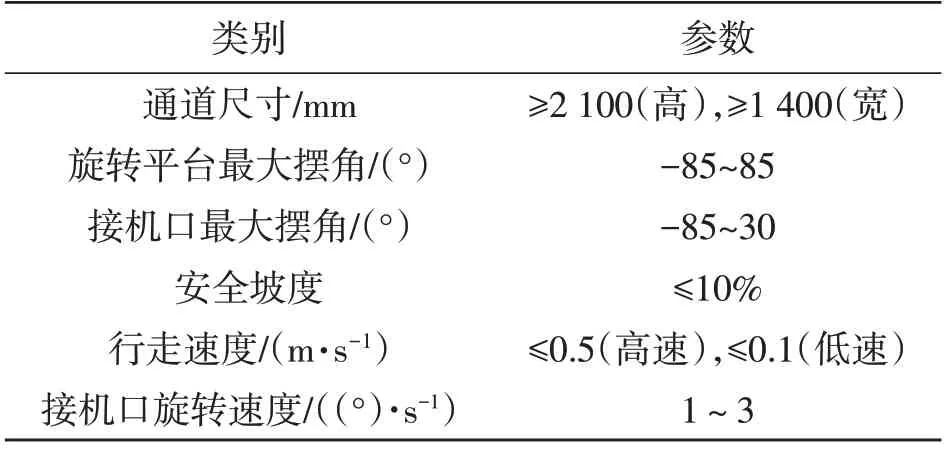
表1 登机桥主要技术参数
2 登机桥运动学模型的建立
由于登机桥的结构复杂,为了提高仿真效率,在保证实现登机桥自动对接舱门的同时,尽量简化模型。接机状态下,登机桥应具有伸出、旋转及接机口旋转等运动的锁止功能。因此只保留了旋转平台、通道、升降装置、行走装置、接机口、调平机构和限位装置等关键部件且结构性参数满足表1 的要求,仿真控制模型如图2所示。
旋转平台是连接候机楼与活动通道的连接部件,主要是由旋转平台本身和立柱组成,旋转平台与立柱之间采用转动副连接。通道A 与旋转平台之间采用转动副连接,使登机桥在升降操作时通道可以上下摆动。通道之间均采用滑动副连接,实现通道在登机桥的工作过程中作伸缩运动,并在滑道上设有通道滑动限位块。升降装置主要由升降立柱内、外套管组成,采用滑动副连接。其中外套管与通道C固接,使登机桥在升降运动时带动通道上下摆动,并保证接机时的通道坡度不大于10%。行走装置主要由行走横梁、行走轮和轮轴组成。横梁与升降装置内套管固接,轮轴与横梁采用转动副连接,实现轮轴绕横梁中心的转动及实现转向行驶。两轮与轮轴之间分别采用转动副连接,并建立车轮与地面间的接触力,使行走轮在地面上实现滚动前进或后退。接机口是活动通道与飞机的连接部分。由控制室、折叠遮蓬、活动地板、自动调平装置等组成。控制室顶端与接机平台用转动副连接,实现接机口的转动。折叠遮蓬靠V 型四杆机构的收张动作,使折叠遮蓬与飞机舱门完美结合和脱离。活动地板是用于补偿因登机桥自身高度变化而产生倾斜的装置,地板与接机口地面采用转动副连接。通过调整可使其与机舱地面保持平行。自动调平装置是接机过程中自动调整接机口地板与飞机舱门相对高度的装置,使其与飞机地面保持在同一水平。位于接机口折叠遮蓬的右下方,由轮杆和调平轮组成,轮与杆之间用转动副连接,实现调平轮的转动。
建立的运动学模型如图3a 所示,其约束副及自由度如表2 所示。其中行走机构构件之间的约束关系如图3b所示,模型验证结果如图3c所示。
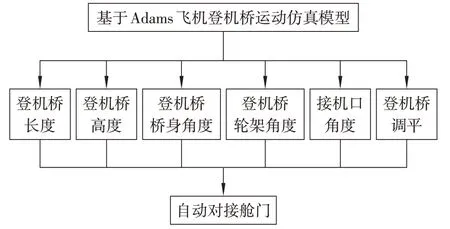
图2 仿真控制模型总图

图3 登机桥运动学模型
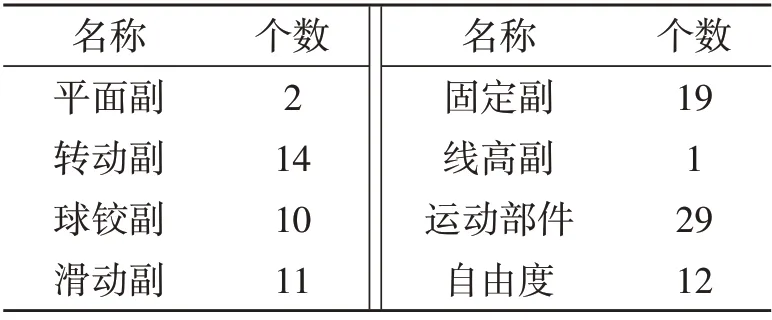
表2 模型约束副及自由度
3 登机桥的仿真实现
3.1 创建传感器
根据MH/T6028—2016 的技术要求设置参数,具体参数见表1。创建相应的传感器,当条件达到动作条件时停止当前仿真。仿真中分别创建了登机桥相对于地面的角度传感器、登机桥左右旋转角度传感器、接机口转角传感器以及篷布和调平轮与机身接触力传感器(图4)。通过进行相应的角度测量,然后分别以这些测量值作为传感器的控制变量,以极限值作为传感器判断动作发生的条件。以调平轮与机身接触力传感器为例说明传感器的建立方法,先建立调平轮与机身之间的接触力的测量levelling_aircraft_contact_MEA_1,并以此作为传感器的表达式,当接触力大于等于50 N时停止仿真。

图4 调平轮—机身接触力传感器的创建
3.2 仿真试验方法
试验时飞机舱门的布置见图5。第一机位、第二机位、第三机位分别表示登机桥位于最低位、中位和最高位。登机桥停泊位与第一接机位、第二接机位、第三接机位的夹角分别为30°、75°、120°。
以第一机位进行仿真,此时登机桥的长度最短。登机桥对接舱门时,轨迹规划如图6所示。图6中O为旋转台,OD 为登机桥,先保持轮架与通道轴线垂直,使登机桥从点D前行1 m至通道外圆点E,然后调整轮架与通道轴线平行,接着沿着圆弧EF 做切线运动至点F,再调整轮架使登机桥沿着FC运动至预靠点C,最后调整接机口完成对接。

图5 试验场地示意图
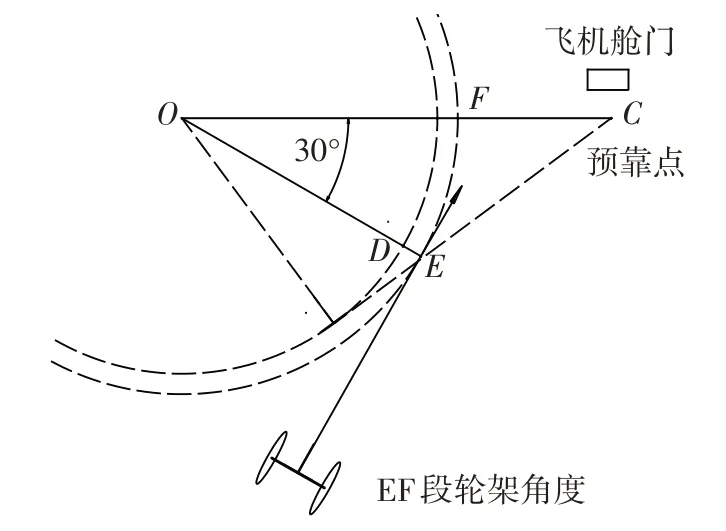
图6 对接轨迹规划示意图
3.3 驱动函数的添加
登机桥模型共有7个驱动,分别为两实心轮在地面上滚动驱动、实心轮的转向驱动、升降机构的升降驱动、接机口的旋转驱动、雨蓬的伸张机构的驱动,活动地板调平时的驱动和调平机构的驱动。
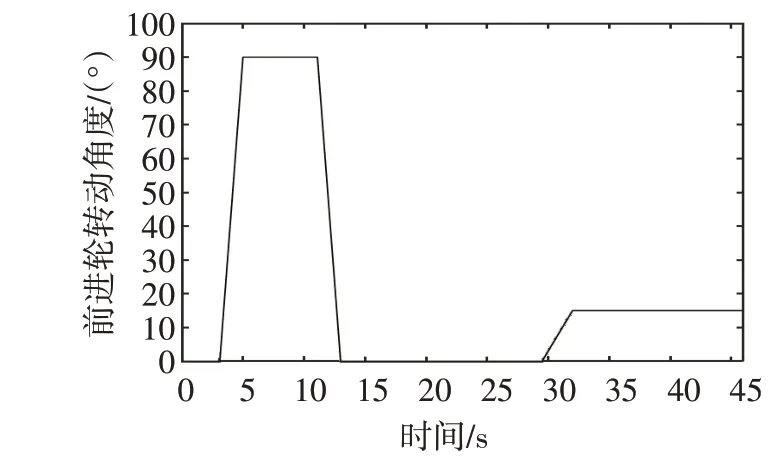
图7 转向驱动函数曲线
为了减少登机桥的冲击,提高稳定性,选用Adams 里的STEP(x,x0,h0,x1,h1)函数作为驱动函数,实现登机桥的步进控制。其中x 是变量,x0、x1是x的初始和终止值,h0、h1是对应于x0和x1的函数值[7]。以转向为例,在轮轴转动副上添加驱动,驱动函数为STEP(time3.1,0.0d,5.0,90d)+STEP(time,11.1,0.0d,13.0,-90.0d)+STEP(time,29.5,0.0d,32.0,15.0d),函数曲线见图7。登机桥在3.1~5 s 时转动90°,使登机桥轮轴与通道轴线平行,此时登机桥沿圆弧EF 切线方向行驶,11.1~13 s 时车轮回正,此后登机桥沿径向FC 运动,29.5~32 s 时登机桥转动15°,缓慢靠近飞机舱门。
3.4 仿真结果分析

图8 接机口与舱门间的距离曲线
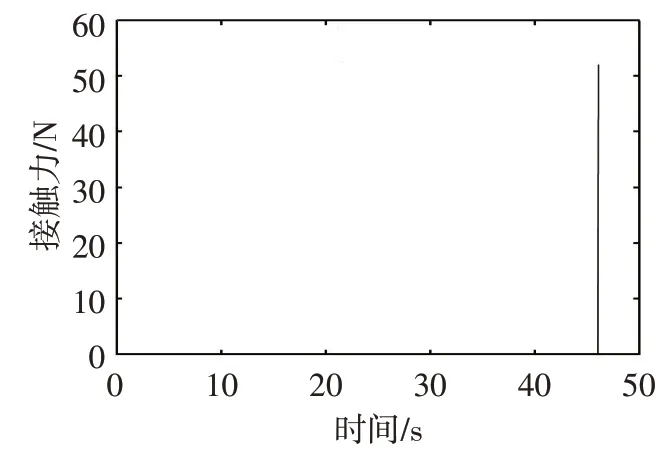
图9 调平轮与机身间的接触力曲线
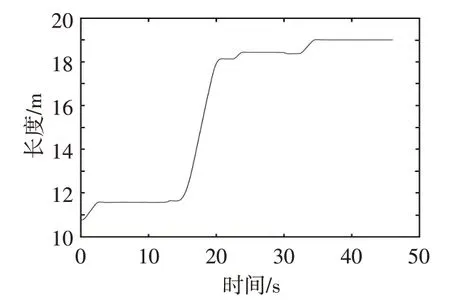
图10 登机桥长度变化曲线
登机桥仿真模型添加相应驱动函数后,设置仿真时间为48 s,仿真步数为500 步。仿真结果如图8~10所示。通过图8可知:接机口与飞机舱门之间的距离是逐渐减小的,完成对接时接机口地板与舱门之间的距离为1.2 cm。但是接机口与舱门之间的距离出现了波动,这是因为轮架在做转向动作时地面对登机桥的反作用力使登机桥绕旋转平台中心轻微转动。图9 为调平轮与机身直接的接触力曲线,由图9可知在46 s之前调平机构与机身未接触,此时没有接触力。在接近46 s 时,调平机构滚轮与机身接触且接触力瞬间增大,由于传感器的作用,当接触力达到50 N时立刻停止了仿真,有效防止对机身造成损伤,说明传感器设置合理且有效。图10为登机桥长度变化曲线,由图10可知在对接的过程中登机桥桥身长度是缓慢变化的,在转向动作时桥身长度基本保持不变,没有出现剧烈变化,在调平机构滚轮的传感器起作用时,登机桥立即停止运动,实现了安全对接。
4 结论与展望
为了实现登机桥的自动对接,根据登机桥的工作原理,基于Adams/View 建立了登机桥的简化模型,并进行运动轨迹规划,采用Adams中的STEP函数和传感器技术实现了登机桥与飞机舱门的安全可靠对接。为满足登机桥完全智能化,下一步的工作是采用图像识别技术和传感器技术,根据登机桥设计规范,进行登机桥行走机构的路径规划、轨迹跟踪以及其他机构动作控制策略研究,用Adams和Simulink联合仿真验证控制方案,实现登机桥的智能控制。
