基于3D 图像重构的水分散粒剂在线混合分析方法研究
2020-07-07徐幼林郑加强马鲁强丁凤娟郭长皓
代 祥 徐幼林 郑加强 马鲁强 丁凤娟 郭长皓
(南京林业大学机械电子工程学院,南京210037)
0 引言
作为近些年逐渐发展并广泛应用的一种农药剂型,水分散粒剂(Water dispersible granules,WDG)正逐渐得到广泛关注,其原因在于农药WDG 具有更为广泛的毒理学和环境生物学意义[1-2]。目前,关于WDG 的变量施用研究仍处于起步阶段[3-4],作为替代品的液体类农药的精准变量施用技术已经逐渐成熟并实际应用[5-6]。
按照药水是否分开盛放,农药的精准变量施用可分为预混合式和在线混合式变量喷雾方式[7]。在线混合变量喷雾采用即混即用的策略,可有效避免预混合式变量喷雾中存在的剩余农药浪费问题,这一优点在喷雾机操作者不知应该预混合多少药水时尤为显著,预混液不足会使得无效作业时间延长,预混液过量又会产生剩余药水处理等问题,因此在线混合式的变量喷雾方式得到广泛研究和关注[8-9]。然而,在线混合变量喷雾对于固体农药却难以直接应用,其原因一方面在于固体农药的有效成分较高,施用量较低[1],另一方面固体药剂的精量注入存在困难[2],因此结合在线混合式和预混合式二者的优点开发适用于固体农药的变量喷雾系统,对于逐渐减小液体类农药的使用非常有利[10-11]。并且对于任一含有在线混合这一特征的喷雾系统而言,药水混合均匀性都至关重要[10]。
关于WDG 与水的在线混合,更高的颗粒分布均匀性有利于颗粒崩解后形成均匀的溶液,因此对于含有在线混合要素的喷雾系统而言,提高WDG崩解后混合均匀性的前提是WDG 分布的均匀性[3]。目前,许多科研人员对农药在线混合效果开展了研究,但主要集中在液体类农药的在线混合效果评价方面。VONDRICKA 等[12]采用数值模拟方法研究了液体农药的混合过程,从而保证了高效的混合室设计;DOWNEY 等[13]采用NaCl 溶液基于导电性在时间序列上的变化测试评估了农药的在线混合效果,受制于农药注入时可能存在的脉动特征,该方法无法获得任意时刻的在线混合均匀性;SUDDUTH 等[14]用氦氖激光系统和变异系数评价喷杆式喷雾机在线混合的浓度均匀性,该方法同样存在特征值是建立于时间序列上的缺陷;此外,采用流场内置传感器并实时获取流体样本的方法[15]同样对于WDG 与水在线混合的均匀性评估意义不大,原因在于这些方法会扰动流场,造成计算不够准确,并且分散采样获取的流动样本难以反映任一时刻WDG 在管路截面上的分布情况。
由于WDG 具有一定的宏观特征,如颗粒颜色、大小及形状[1]等,可以采用图像方法对WDG 与水的在线混合效果进行评估。徐幼林等[16]使用聚苯乙烯颗粒跟踪流体运动,并用高斯分布统计量对混合均匀性进行了初步计算,但是其评估过程基于单视角图像,存在准确性不足的问题;DAI 等[17]采用图像方法分析了多种农药的在线混合效果,但是其方法针对液体农药,难以直接应用于WDG 的混合效果评估;SLETTENGREN 等[18]采用近红外成像研究了脂基粉末间的混合特性,由于近红外与可见光图像成像波段有较大区别,故其研究侧重于类流体状态微细粉末的混合,而非具有宏观特征的农药颗粒,同时其试验投入也较大;LIU 等[19]评估了用于颗粒间混合效果评价的诸多方法,由于不同颗粒间特征差异较大,故其研究方法及结论并不直接适用于WDG 与水在管路中的混合情况;PARK 等[20]同时评价了两种颗粒在管路轴向及径向上的混合效果,但是其方法针对开放系统,通过获取样本来完成,因此并不适合封闭管路中WDG 与水在线混合效果的评估。总之,图像方法可以用于颗粒分布的度量,但是针对WDG 与水在线混合效果的评估,已有方法尚不可行。
为了合理评价WDG 与水在线混合效果,解决含有在线混合特征的变量喷雾系统中WDG 与水在线混合效果评价的难点问题,借助流体图像采集装置,基于获取的农药WDG 代替物的双视角在线混合图像,构建三维坐标下模拟粒子在水中的立体(3D)分布图像,提出药水在线混合效果评价方法,以期为流场中粒子运动特性提供参考,从而为农药WDG 在线混合效果的定量分析,开发高性能在线混合装置、评价农药WDG 在线混合应用条件提供技术支持。
1 材料与方法
1.1 系统原理

图1 WDG 在线混合变量喷雾试验系统原理图Fig.1 Schematic of inline mixing variable-rate spraying system for applying WDG
完整的WDG 在线混合变量喷雾试验系统如图1 所示,用于WDG 与水在线混合的试验子系统如部分Ⅰ所示。初混水泵用于输送动力液体进入射流混药器;WDG 储存于药箱中,并经WDG 输送器在射流混药器吸入液体的帮助下进入载流,射流混药器实现药水在线掺混后将WDG 与水的混合液输送至水平检测管中,因此,若WDG 能够在水平检测管中充分均布并最终完全崩解,则图1 中变量喷雾系统Ⅱ中用于药液缓冲的药箱可以进一步缩小并有可能取消,从而在简化系统配置及控制的同时还能确保药水混合效果以及喷雾质量。高速相机采集水平检测管中WDG 与水在线混合的实时水平视角图像,全反射三棱镜采集检测管中靠近射流混药器出口位置垂直于相机方向的图像,用于WDG 位置信息的实时三维重构。试验过程中需要确保高速相机、全反射三棱镜以及水平检测管三者间位置的固定性。经过实际安装检测,高速相机镜头与水平检测管前侧面的距离为40 cm,全反射三棱镜垂直面平行于高速相机成像平面,全反射三棱镜水平面平行于地面,直角棱线平行于检测管[7],以尽量减小图像重构过程中可能出现的误差。
1.2 试验材料
鉴于直接采用农药WDG 进行在线混合可能会带来一定的操作风险,因此选择替代的粒子进行WDG 的模拟。根据文献[1],农药WDG 的构成主要包含分散剂、润湿剂、渗透剂、填料、崩解剂、粘结剂以及润滑剂等,不同颗粒成分以及造粒方式所导致的物理性质差异主要在于颗粒的大小、孔隙率、堆密度以及密度等。因此,用于代替WDG 的模拟粒子首先应具有不同的尺寸及密度特征,这会形成明显的颗粒沉降速度差别,从而用于替代不同造粒直径、不同成分的农药WDG 颗粒。根据研究和分析,模拟颗粒可以用表1 所示粒子替代[1]。可见等效直径越小,密度与水更为接近的模拟粒子,具有更小的沉降速度。需要指出的是,模拟颗粒并不能完全表征农药WDG 特性,如崩解性,但是考虑到WDG 颗粒在快速崩解后的混合效果直接受制于颗粒崩解前的分布效果,因此考察模拟颗粒的分布仍具有显著意义。

表1 模拟粒子属性Tab.1 Simulation particle attributes
1.3 试验方法
1.3.1 图像采集
为了构建基于3D 图像重构的混药器混合WDG分析方法,需要首先采集合适的WDG 与水在线混合图像,由于颗粒直径越小的粒子进行图像识别的难度越高,因此以颗粒直径最小的PS 粒子为对象采集示例图像;设置载流流量Q 为初混水泵的最高流量2 000 mL/min,其也是在线混合喷雾中常用的较高载流流量[7],以快速向药液缓冲箱中补充药水混合原浆,在检测管内径为1 mm 的条件下,载流流速高达0.25 m/s,设置高速相机帧率为250 f/s,帧间时间间隔Δt 仅为0.04 s,设置相机曝光度为39.4 ms;设置颗粒相含率C 为0.5%。
试验开始前需先拍摄同等环境下无WDG 的图像,如图2a 所示;然后再拍摄颗粒实际流过时的图像,随机选取的第1 帧在线混合原始图像如图2b 所示,可见上述相机设置实现了颗粒图像的清晰采集,通过图像差分操作可以迅速去除图2b 中的绝大部分噪声,如图2c 所示。与图2b、2c 紧邻的第2 帧图像如图2d、2e 所示;每一帧图像中上半部分均为相机水平视角混合图像,下半部分均为通过全反射三棱镜采集的相机垂直视角图像。通过这两帧连续图像进行分析方法的构建。
1.3.2 算法验证

图2 WDG 分布图像采集过程Fig.2 Image acquisition for WDG distribution
为了验证算法的正确性,进一步设计了多种工况用于对所提出的方法进行测试,由于粒子图像的处理很容易受粒子加入量的影响,当粒子加入量过多时,可能会带来算法失效的问题,因此进一步采集Q=2 000 mL/min、C=1.0%下的图像;此外,为了验证Q 对算法的影响,进一步设置Q=1 400 mL/min、C=0.5%的试验组进行算法验证。
1.3.3 模拟粒子的在线混合试验
在提出基于3D 图像重构的混药器混合WDG分析方法后,可对4 种不同模拟粒子的在线混合效果进行实际测试,测试工况为:Q =2 000 mL/min,C=0.5%。对连续采集1 s 获得的250 帧图像进行检测,重复试验3 次,以减小试验误差,用于考察一定流场下,不同特性WDG 颗粒的混合效果。
2 基于3D 图像重构的分析方法
2.1 WDG 分布图像预处理
通过对图2a 中的管道边缘局部图像作霍夫直线检测[21],从而获取水平视角及垂直视角图像中检测管内的上下边界,并据此提取具体的粒子活动区域,即水平视角及垂直视角的ROI (Region of interest)图像,图3a 为第1 帧图像的ROI 提取结果,经实测,两视角图像的高度均为140 像素,图像的宽度约为250 像素。由于图3a 图像中仍存在一些噪声,并且整体图像亮度偏暗,这有可能使接下来的粒子分割产生较大误差,因此在图像预处理中,首先进行图像中值滤波,然后进行图像的亮度变换,使得调整后的图像灰度占据全部灰度级范围,从而得到图像预处理结果,为下一步的图像分割做准备,如图3b 所示。

图3 WDG 在线混和水平及垂直视角图像预处理Fig.3 Image pre-processing in vertical and horizontal viewing directions
2.2 粒子图像的分割及形态学处理
采用迭代式阈值分割方法对图3b 进行处理[21-22],如图4a 所示,分割结果尽量避免了气泡干扰,且对粒子图像的粘连具有良好的区分效果。由于经过阈值分割的粒子图像仍存在未能完全去除的气泡以及粒子粘连,因此采用形态学运算中的开运算方法对图4a 图像进行先腐蚀再膨胀,实现进一步的粒子图像分割以及噪声去除,如图4b 所示。然后对所获得的图像进行粒子边缘提取,边缘提取同样基于形态学运算完成,通过将图4b 中图像减去经3 ×3 块的9 点元素腐蚀的图像,即可获得粒子的边缘图像,用于下一步粒子图像特征的提取,结果如图4c 所示。

图4 第1 帧粒子图像的阈值分割及形态学处理Fig.4 Particle image segmentation and morphological processing of particle image frame 1
2.3 粒子图像质心及转动惯量参数提取
为了实现粒子的匹配,包括水平与垂直视角方向上粒子的匹配,以及时间序列上前后帧间粒子图像的匹配,结合物理学概念,采用灰度质心表征粒子的位置坐标,而采用归一化转动惯量I(Normalized moment of inertia)作为粒子的形态特征[23]。
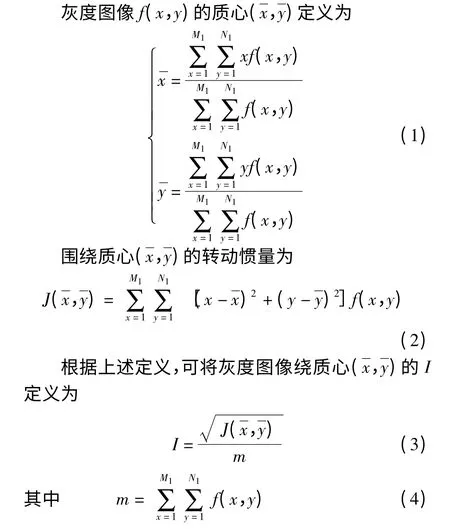
式中 m——图像的质量,表示像素值的累加
图5 为粒子坐标系的设置,表2 为用上述方法对第1 帧图像进行计算所获得的两视图中粒子质心坐标及对应I 值。

图5 多视角粒子定位图像及坐标系Fig.5 Multi-view particle positioning image and coordinate system

表2 第1 帧图像双视角中粒子质心坐标及I 值Tab.2 Extraction of particle attributes in both viewing directions for image frame I
2.4 双视角粒子图像匹配及初步三维重构
为了能够有效地将水平视角以及垂直视角中的粒子进行匹配,并根据水平视角及垂直视角中的粒子坐标重构出三维坐标系下的粒子空间坐标,可采用横坐标的一致性作为判据。由于相机镜头水平安放,并垂直于检测管的轴线以及三棱镜的直角棱线,且相机镜头距离检测管仅40 cm,因此在重构中不考虑镜头的畸变效应[24],且检测管壁仅为1.5 mm,也使得粒子图像在Y 轴以及Z 轴上的位置校正变得冗余,即忽略玻璃管壁对粒子的折射效果。水平视图提供了粒子图像(x,y)坐标信息,而垂直视图提供了(x,z)方面的信息,因此匹配并三维重构的粒子图像即具有(x,y,z)信息,为减小两视角中配对粒子X 坐标的微小误差,在最终重构出的粒子三维坐标中,X 坐标采用两视角对应粒子的平均值。由表2 可见,第1 帧图像中水平视角中有19 个粒子被检测到,而在垂直视角中却有20 个粒子,这说明水平视角中至少有一个粒子存在视图重叠的情况,需要通过算法进行填充,通过在缺省数列中随机填充粒子,并使得两视图中横坐标间的欧氏距离最小化,即可以获得正确的填充数列,从而使得两视图中的粒子数相等,并进行基于横坐标一致性的粒子匹配。匹配算法如图6a 所示。
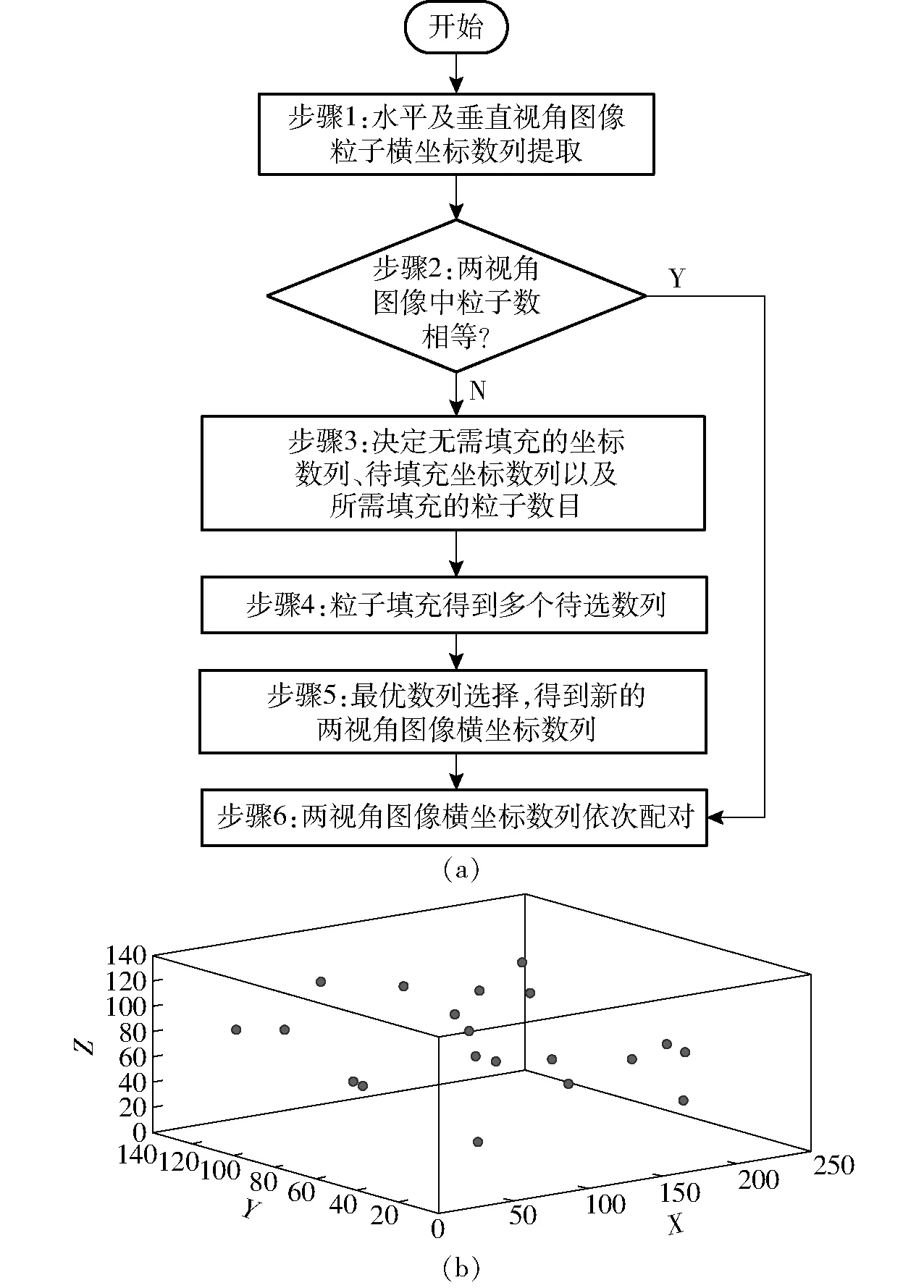
图6 粒子三维图像重构算法步骤以及初步重构的第1 帧三维粒子图像Fig.6 Particle 3D image reconstruction algorithm flow chart and image of initial reconstructions for frame 1
通过步骤1,可得

式中 X(1)——水平视角提取的粒子横坐标数列
a——水平视角中粒子数目
X(2)——垂直视角提取的粒子横坐标数列
b——垂直视角中粒子数目
步骤2 判断两视角图像粒子数目是否相等,若相等则直接对X(1)和X(2)进行步骤6 的依次匹配;否则进入步骤3,得待填充粒子数N、最大粒子数M、待填充数列X(l)、无需填充数列X(m)

步骤4 获得ANM个由X(l)及缺省位置的邻值构成的待选数列X(w),步骤5 通过使得X(w)及X(m)分别所形成的向量X(w)和X(m)间的欧氏距离最小化,从ANM个待选数列X(w)中选择最优数列

步骤6 中将X(new)和X(m)进行依次匹配即可实现粒子空间坐标的初步重构。
根据该算法重构出的第1 帧初步粒子空间图像如图6b 所示。
2.5 粒子空间分布均匀度计算方法
在获得重构的粒子空间分布后,即可以有效度量粒子空间分布的均匀程度。鉴于粒子空间分布均匀性具有不同的定义,因此选取最普遍的定义方法,即将粒子空间分布的均匀程度定义为空间各部位所含粒子量的一致性[7,25],因此提出体积加权的粒子空间分布均匀度指数γα,计算式为
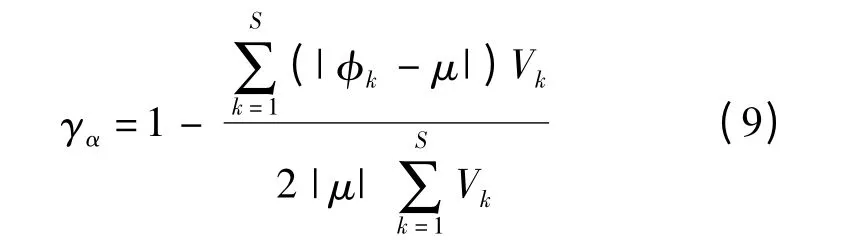
式中 φk——控制体分块内颗粒含量
μ——控制体内平均颗粒含量
Vk——控制体分块体积
S——控制体内分块数目
γα越高,则粒子空间分布越均匀。
试验中所采用的检测管控制体为柱体,因此需要对上述直角笛卡尔坐标系内的颗粒坐标(x,y,z)转换为空间柱面坐标(x,r,θ),从而方便在柱形计算域内实现均匀性的求解。
2.6 粒子三维图像空间速度矢量求解方法
(1)基于连续帧图像空间粒子匹配的测速方法
为了准确获得三维空间中粒子的速度矢量,首先要能够准确地对连续图像中空间粒子进行跟踪与匹配,为了实现该过程,由于农药WDG 在线混合应用中的C 普遍较低,且连续两帧图像中运动粒子的运动距离普遍较小,因此提出采用适合于稀相输送粒子跟踪的近邻检测方法以及基于粒子I 特征匹配相结合的方法实现连续图像间粒子的匹配。则粒子移动速度vi可定义为

基于近邻检测的粒子追踪表示为

其中

式中 lw——检测管中的液体帧间平均流动距离
Δt——帧间时间差,本文为0.04 s
γ——检测管的成像直径,本文为140 像素
α——邻域系数,本文取0.2
对于第1 帧图像中的粒子(x1i,y1i,z1i),第2 帧图像中符合近邻检测的粒子集为{(x2i,y2i,z2i)},则进一步采用基于I 值的特征匹配方法从粒子集中选择同第1 帧粒子中最为相似的粒子,从而实现粒子的匹配以及速度求解,选择过程中需要保证两粒子间在两个视图方向上的I 差异均最小化。
需要指出的是,依靠上述方法并不能绝对保证图像中每个粒子均实现精准的帧间粒子匹配,除了不同帧之间存在粒子进入ROI 或从ROI 中逸出的原因之外,空间粒子坐标的误重构也是一个必须考虑的因素。由于粒子的重构是基于横坐标的一致性进行的,因此不同帧之间对应粒子的X 坐标不存在误判情况,误判的情况仅存在于Y、Z 方向,且误判粒子成对存在。因此,在粒子帧间匹配及速度计算时,{(x2i,y2i,z2i)}为空集时,对该成对误判粒子的Y 坐标或者Z 坐标进行互换,纠正粒子重构坐标后重新进行匹配。纠正后仍呈空集的,则放弃对该粒子进行测速,但是该粒子仍可用原始坐标参与均匀性的计算。表3 为基于第1 帧及紧邻的第2 帧所重构的粒子三维坐标,采用时间序列帧间粒子对应关系校正的连续两帧粒子分布图像如图7所示,可见连续两帧之间粒子的对应关系较好,并且粒子坐标均分布在直径为140 像素的柱体内,表明算法具有可行性。以该柱体为计算域求解的第1 帧图像及第2 帧图像的粒子空间分布均匀度分别为0.078 3 和0.079 3。
表4 为根据上述连续两帧图像,通过粒子空间移动距离及帧间时间差计算所得的粒子移动速度,可见流场中不同粒子的移动速度具有差异性,这体现了流场的不规则性,有些邻近的粒子由于这种不规则性甚至呈现出较大的速度差异,如第17 号至19 号粒子,同时,这些粒子的运动速度矢量与Y 轴的夹角并不总在π/2(1.57)左右,表明粒子在检测管内的运动并不局限于单一方向,有些粒子随流场克服重力向上运动,而有些粒子则向下运动;经求解,各粒子沿X 轴方向平均速度为178.13 像素/s。

图7 基于连续两帧匹配的三维粒子重构最终结果Fig.7 Final particle 3D image reconstruction based on consecutive two images

表4 第1 帧及第2 帧图像间粒子空间移动位移参数Tab.4 Particle space-shifting parameters between frame 1 and frame 2
(2)基于互相关算法的粒子速度验证
为了验证上述算法对颗粒跟踪的准确性,采用图像测速中最常用的互相关算法对基于3D 图像重构的算法中粒子速度进行验算。互相关算法指的是对连续两帧图像进行互相关运算,获得函数最大值时对应两帧图像间的运动位移[26],通过对双视角连续两帧图像的同时处理,即可获得对应粒子的移动速度。图8 为采用互相关算法以及本文所提出的基于3D 图像重构的粒子测速结果。可见对于大部分粒子,两种方法对各粒子速度大小的求解结果基本一致,且粒子速度在矢量特性上的差异性更小,仅有个别粒子的速度差别较大,表明本文提出的方法整体具有可行性;存在的差异主要是由于自相关算法未基于粒子在三维空间中的精确定位,而是分别基于单视角图像中粒子运动速度求解,并最终基于两视角中对应粒子速度的合成,缺少了精确的粒子匹配环节所造成的,换言之,仅基于自相关计算,可以准确实现单视角条件下的粒子追踪,但是却为3D立体条件下粒子追踪带来了不准确性,因此本文提出的基于粒子3D 重构并求解粒子运动状态的方法相对于自相关算法在单个粒子的速度求解方面具有优势。

图8 基于互相关算法和基于连续帧图像空间粒子匹配的测速结果比较Fig.8 Comparisons of speed measurement results based on cross-correlation and particle continuous-frame matching
2.7 不同工况下的算法正确性验证

图9 不同工况下的分析方法正确性验证Fig.9 Correctness verification for proposed analysis methods
C 为0.5%,Q 为1 400 mL/min 对应图像处理过程如图9a 所示,图像分割及粒子匹配良好,根据各粒子速度矢量求解可知粒子在Q =1 400 mL/min条件下在X 轴方向运动平均速度是125.00 像素/s,与Q=2 000 mL/min 时的粒子速度178.13 像素/s 呈比例对应关系,这进一步证明了基于连续帧图像空间粒子匹配测速方法的准确性,说明粒子水平运动速度与载流流速对应。图9b 为Q =2 000 mL/min,而增加C 至1.0%所呈现出的粒子分割及匹配结果,可见在粒子密度较高的条件下仍会呈现出一定的粒子粘连现象,但由于算法对缺省粒子进行了填充,因此仍旧实现了粒子图像的3D 重构,并且由于对连续帧图像中粒子匹配进行了自动调整,从而有效避免了粒子的误匹配,所求解X 方向速度为175.40 像素/s,与Q=2 000 mL/min,C =0.5%所得结果(178.13 像素/s)近似,同样证明了算法的可行性。
3 模拟粒子在线混合试验结果与讨论
4 种模拟WDG 粒子在线混合均匀性比较如图10 所示,可见不同粒子在同一C 下的均匀性效果存在差异,并且随着粒子的沉降速度增大,其混合分散效果逐渐变差,PS 粒子的γα达到0.062,而Rapeseed 粒子却仅有0.021,造成这种状况的原因在于,即便射流混药器的流场湍动效果较强导致粒子能够初步分散,但是粒子的持续悬浮仍要求流体运动对粒子所产生的曳力能够克服粒子的重力,因此不同的粒子特性也使得其在线混合效果存在差异。WDG 在线混合系统中,由于WDG 的快速均匀混合要求WDG 均匀分散,因此应用沉降速度较大的WDG 时尤其需要重视其在线混合均匀性问题。

图10 不同种类粒子在线混合均匀性比较结果Fig.10 Uniformity comparison for different kinds of simulating particles
由于粒子的沉降速度与在线混合均匀性效果存在对应关系,因此着重考虑重力方向上(Y 方向)连续1 s 内粒子运动速度矢量偏向于重力方向的概率。如图11 所示,除了PS 粒子,Nylon A、Nylon B和Rapeseed 这3 种粒子均表现出运动速度方向同Y轴方向夹角平均值小于π/2 的特征,表明这些粒子均具有向Y 轴正方向,即向下运动的趋势。并且,随着粒子沉降速度的增加,其夹角平均值越小,表明其受重力作用向下运动的趋势越明显,同理,粒子向下运动的概率也越大,任意时刻,在流场和重力的双重作用下,Rapeseed 约有64%的概率会向下运动,而这个概率对于PS 粒子来说仅有57%。此外,PS粒子的垂直运动角为1.58 rad (>π/2),表明部分PS 粒子在载流的作用下向上运动趋势较其它粒子更为明显,考虑到PS 粒子与水的比重仅为1.05,近似于水,这说明PS 粒子更能直观反映纯液体流场的特征,可能具有作为流场示踪粒子应用的潜力,而其它沉降速度较大的粒子则很难获得这种均匀分散的效果。然而,由于实际农药WDG 在线混合应用中存在的崩解特性,且崩解后颗粒直径减小,因此理论上随着混合时间的延长,初始条件下难以均匀混合的颗粒的流化能力应有所增强,这可能会提高其崩解过程中颗粒与水的混合效果,从而促进药水混合,但是这仍需进一步的试验支持。

图11 不同种类粒子流场运动速度方向比较Fig.11 Velocity comparison for different kinds of simulating particles
4 结论
(1)搭建了用于农药水分散粒剂(WDG)在线混合效果评估的试验系统,借助全反射三棱镜的反射效果,同时采集检测管中WDG 颗粒的水平视角及垂直视角图像,用于三维粒子分布图像的重构,从而实现基于3D图像的农药WDG 在线混合效果分析。
(2)对原始图像进行背景差分、对比度拉伸、迭代式阈值分割处理后,可对粒子质心坐标及粒子归一化转动惯量(I)进行提取。根据水平与垂直视角图像中粒子横坐标的一致性进行双视角图像中粒子的匹配,对由于单视角中粒子重合造成的粒子缺省进行基于横坐标间欧氏距离最小化的粒子填充,从而完成粒子三维图像的初步重构;根据连续图像中粒子运动速度的非突变性,对粒子空间坐标进行校正,从而实现粒子空间坐标的最终三维重构。根据粒子三维重构图像提出了基于空间体积加权法的粒子空间分布均匀度计算方法;根据连续帧图像中粒子的位置分布及特征(I)相似性,实现连续帧间粒子的匹配,从而完成时间序列上粒子运动速度及运动方向的求取。不同工况下的测试验证也表明,尽管较大的粒子相含率下图像分割仍存在一定缺陷,但所提出的方法能够有效应用于农药WDG 在线混合效果的评估。
(3)对4 种具有不同沉降速度的模拟WDG 颗粒进行了实际在线混合测试,结果表明,粒子的沉降速度越小,其在线混合效果越好,相应地,其沿重力方向运动的趋势越弱,向下运动的角度也越小;考虑到WDG 的快速均匀混合需要WDG 均匀分散,因此应用沉降速度较大的WDG 时,尤其需要重视其在线混合均匀性问题,相应地,颗粒更小、密度与水更为接近的粒子,如直径为0.8 mm的PS 颗粒,其混合均匀度更高。今后需针对实际农药WDG 颗粒展开具有崩解特性条件下的均匀性及流动测试,以进一步促进农药WDG 的在线混合变量喷雾应用。