光伏系统最大功率点追踪算法研究综述
2020-07-06刘鹏飞
刘鹏飞
(南京普天大唐信息电子有限公司,江苏 南京,210000)
能源是推动经济发展的物质基础[1],但是,随着社会进步、经济发展不断加快,能源消耗也日益增加,如何同时实现经济发展与环境保护成为各国急需解决的问题。为了解决上述问题,各国加大了对风能、太阳能在内的清洁可再生能源的开发力度[2],其中,太阳能因取材方便、无运输问题、储量巨量、生态友好性等优势受到越来越多的关注[3]。虽然太阳能作为最好的清洁绿色能源受到各国的大力支持,但是,目前光伏发电的转换效率仅为20%左右[4],而且由于光伏电池自身的非线性输出特性,当辐射度和温度等外界条件变化时,光伏电池的输出功率也无法维持在最大功率点(maximum power point,MPP)[5],因此,为了提高对太阳能的利用效率,使光伏发电系统工作在最佳状态,最大功率点追踪技术(the maximum power point tracking,MPPT)便应运而生。
本文介绍了目前光伏发电系统中常用的MPPT计算方法,介绍了各自工作的原理,分析了各种计算方法的优缺点和适应范围。
1 MPPT概念
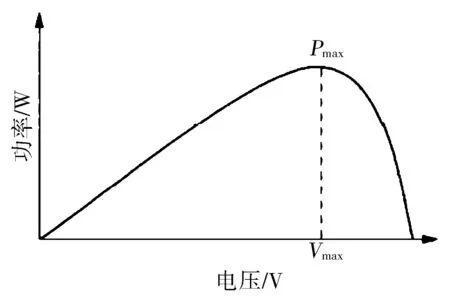
图1 太阳能光伏电池的输出功率特性曲线Fig.1 Output power characteristic curve of solar photovoltaic cells
随着光照度、温度、外界负载的变化,光伏电池的输出功率也发生变化。在同一光照强度和温度下,太阳能电池可以输出不同的电压,而只有在其中某一电压下,才能达到最大输出功率,这一点称之为最大功率点。图1所示为太阳能光伏电池的输出功率特性曲线,由此可知MPPT算法的工作原理为[6]:当太阳能电池的输出电压小于最大功率点处的电压Vmax时,光伏电池的输出功率与输出电压成正比;当太阳能电池的输出电压大于最大功率点处的电压Vmax时,光伏电池的输出功率与输出电压成反比。由此可知,MPPT算法实质为自寻优,通过调整光伏电池的输出电压,使光伏电池始终输出最大功率[7]。
2 单峰MPPT算法
在特定外部条件下,光伏电池的输出功率特性曲线呈现单个峰值,即该光伏电池只有1个最大功率点,此时光伏电池最大功率点寻优过程即为单峰MPPT算法。
2.1 恒定电压法
从文献[4]中可以看出:在不同光照度条件下,光伏电池的最大功率点处的电压Vmax基本保持不变。在实际应用过程中几乎认为该电压不随光照度变化而发生变化,经研究发现Vmax基本位于(0.71Voc,0.78Voc)区间内,其中,Voc为光伏电池的开路电压。因此,在实际应用过程中,通常将Vmax取为0.75Voc[8],将光伏电池的输出电压调整至该值附近即可得到近似最大输出功率。
图2所示为恒定电压法流程图。从图2可以看出恒定电压法的工作流程为:预先设置光伏电池的输出电压,通过不断调整光伏电池的输出值,最终使光伏电池的输出电压达到设置的电压。该方法控制简单,易于实现,因此,可应用于对最大功率点追踪要求不高的光伏系统中[9]。但是,恒定电压法未考虑温度等外部条件对光伏电池输出功率特性的影响,在不同温度下,若仍将光伏电池的输出电压调整至同一设置电压,则会导致其最终的输出功率偏离最大功率点。
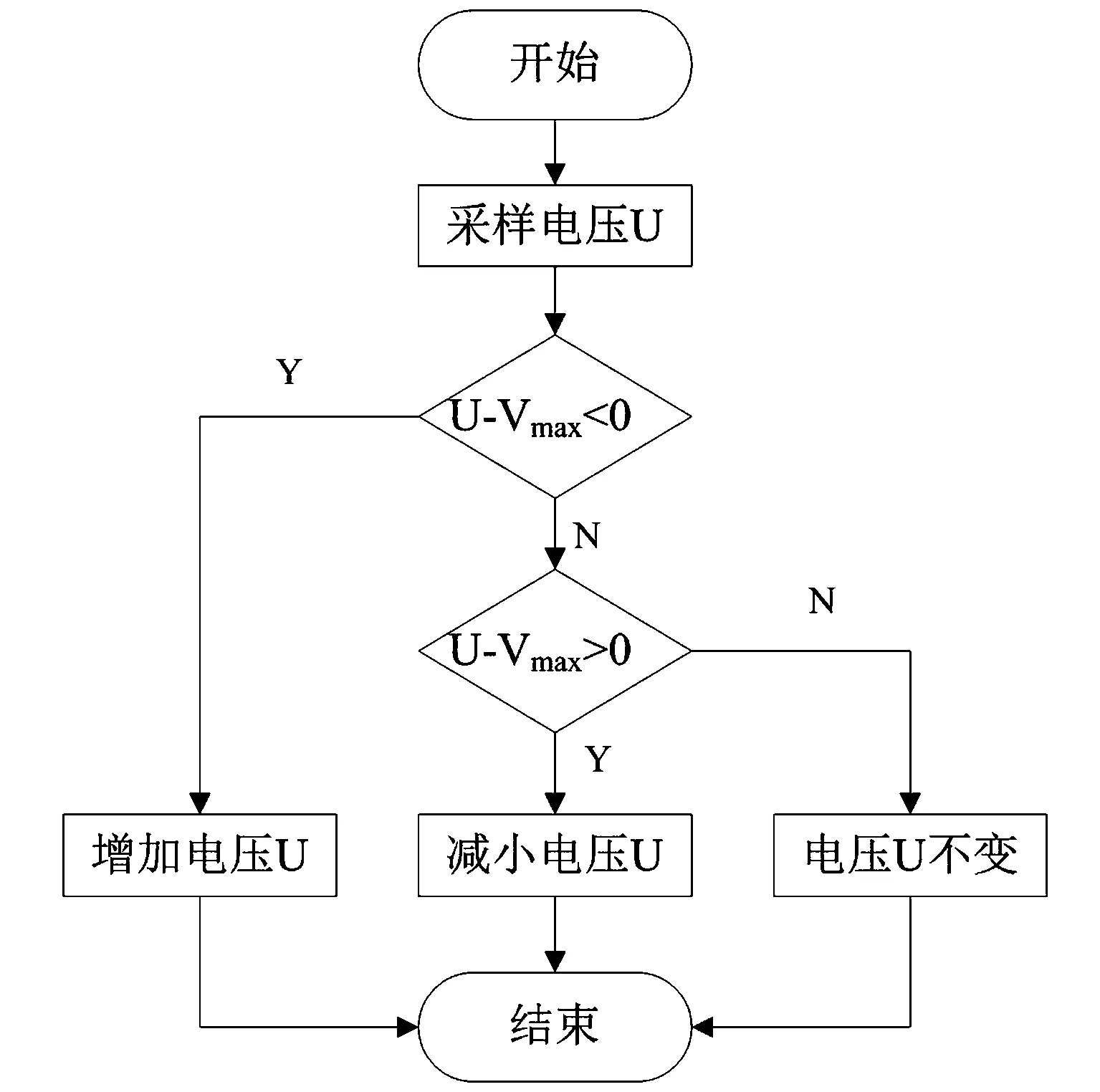
图2 恒定电压法流程图Fig.2 Flow chart of constant voltage method
2.2 扰动观察法
扰动观察法是通过干扰被控对象分析其变化规律的方法,是一种以实时调整为基础的控制方法[10],是目前应用最广的MPPT算法[11]。扰动观察法基于太阳能光伏电池的输出功率特性,通过对光伏电池工作电压或电流施加扰动,使光伏电池的输出功率朝最大功率点逼近[12]。
图3所示为扰动观察法工作流程图。先对每个工作周期内光伏电池的输出电压和输出电流进行采样,计算该周期内光伏电池的输出功率,并与上一周期内的输出功率进行比较。若当前输出功率小于上一周期的输出功率,则说明当前输出功率点落在最大功率点的右侧,此时,应减小光伏电池的输出电压,再次进行输出电压和输出电流采样;若当前输出功率大于上一周期的输出功率,则说明当前输出功率点落在最大功率点的左侧,此时,应加大光伏电池的输出电压[13]。这样通过不断对光伏电池输出电压扰动,最终使光伏电池的输出功率达到最大功率点,实现光伏电池的全功率输出,有效提高太阳能的利用效率。

图3 扰动观察法工作流程图Fig.3 Flow chart of perturbation and observation method
扰动观察法因原理简单、易于实现、测量参数少等优点被广泛应用于光伏系统中,但是如何选择扰动步长是该算法中较为核心的问题。当扰动步长选取过大时,虽可快速寻优,但在最大功率点附近会来回振荡;而选取较小扰动步长时,虽可较精准地寻优到最大功率点,但调整过程较缓慢。
因此,为了解决定步长扰动观察法的不足,一些学者提出了变步长扰动的思想对扰动观察法进行优化。文献[14]提出了分区变步长扰动观察法,在远离最大功率点的区域内采用步长较大的固定步长,在最大功率点附近的区域内采用步长较小的变步长,改进后的扰动观察法可有效避免传统扰动观察法中的缺点。文献[15]在定步长扰动的基础上引进变步长因子,变步长因子的取值与离最大功率点的距离、输出电压相关,通过仿真分析可知通过引入变步长因子,其寻优速度和稳定性都优于传统定步长扰动观察法。文献[16-17]提出了基于滞环比较和面积差相结合的变步长扰动观察法,实验结果表明改进后的扰动观察法同样在抑制功率振荡和寻优速度上优于传统扰动观察法。
但是,变步长扰动观察法在最大功率点附近仍然会出现小幅振荡,造成能量损耗[18],众多学者在扰动观察法的基础上结合其他优秀算法实现对最大功率点的快速和有效追踪。文献[19]提出结合电导增量法和扰动观察法的双模式控制法,在外界基本不变化时,利用小步长扰动观察法;而在外界有较大变化时,采用电导增量法,因此,无论外界环境如何变化,该控制方法的均可实现快速追踪,无明显功率振荡。文献[20]利用模糊控制理论的优点来修正扰动观察法,通过设置合理的模糊控制语言规则,实时修正扰动幅值的精度。
变步长扰动观察法和扰动观察法结合其他控制算法在一定程度上解决了传统扰动观察法步长选择问题和功率振荡问题,但是,在多种方法切换过程中的衔接问题以及在连续切换过程中切换失败的风险都对系统提出了较高的要求。
2.3 电导增量法
由前面提到的光伏电池的输出功率特性曲线可知:在最大功率点左侧,功率对电压的导数为正数,在最大功率点处功率对电压的导数为零;在最大功率点右侧,功率对电压的导数为负数。因此,电导增量法就是通过计算光伏电池的输出功率对输出电压的导数来改变光伏的控制信号,从而实现最大功率点追踪的算法[21]。
电导增量法的原理如下[13]:
光伏系统的输出功率为
P=IPVUPV
(1)
对式(1)两边同时对电压求导,可得:
(2)
(3)

2.4 模糊控制算法
模糊控制算法是一种模仿人类决策过程的智能算法[26],通常适用于数学模型较为复杂的系统中[27-28],可有效解决光伏电池非线性输出功率和频繁变化的边界环境问题,能够根据外界条件调整光伏系统的扰动步长,提升功率追踪效率[29]。模糊控制算法分为3个步骤[30]。
1)模糊化。在光伏系统模糊控制算法通常利用电导增量法的核心思想来判断最大功率点,一般选取E(n)和ΔE(n)作为二维模糊控制器[31]的输入量,将光伏系统的ΔD(n)作为输出量,各参数定义如公式(4)~(6)所示[32]:
(4)
ΔE(n)=E(n)-E(n-1)
(5)
ΔD(n)=D(n)-D(n-1)
(6)
其中:P(n)为第n次光伏电池的输出功率;UPV(n)为第n次光伏电池的输出电压;D(n)为第n次光伏系统的占空比。
定义模糊集合E,ΔE和ΔD的模糊子集数和确定隶属度函数。
2)根据光伏系统工作点与最大功率点的位置关系,确定模糊控制规则表。
3)模糊判决,根据模糊推理所得的模糊集合或隶属函数后,需将此模糊量转为精确的控制量输出给光伏系统,最终实现最大功率点追踪。
文献[32]在光伏电池的等效模型基础上,采用模糊控制算法实现光伏电池最大功率点追踪。在Cuk电路[33]和Boost电路[34-35]中,模糊控制算法均具有较好的动态响应性能和良好的稳定性。通过非对称模糊控制MPPT[36]、变论域模糊控制MPPT[37],响应速度、追踪速度和抑制功率振荡效果均有明显提升。
3.3 排便指导 养成良好的排便习惯是治疗功能性便秘非常重要的环节,指导患者排便要有规律,每日1次,最好定时在晨起后或进食后排便,据报道,排便的最佳时间是早餐后[11]。无论有无便意,到时都应坚持排便,久而久之就可建立正常的排便条件反射。同时要缩短排便时间,以10~20 min内为宜,避免久蹲久坐而导致肛门肌疲劳,排便时应当集中注意力,不要在排便时看报纸,思考问题等,不要抑制便意,避免用力排便[12]。患者有肛裂,可于排便前肛周涂润滑剂,轻轻按摩肛门括约肌,指导患者避免过久的无效排便,人工取便时动作要轻柔。
2.5 最优梯度法
最优梯度法是以梯度法[38]为核心的多维无约束最优化数值计算法,通过选取系统的目标函数的梯度方向作为每次迭代方向,逐步逼近目标函数极值。对于光伏电池,应选取正梯度方向,进而逐步逼近目标函数的最大值。因此,用最优梯度法来追踪光伏电池的最大功率点的计算过程如下[39]。
光伏电池的输出功率与输出电压的关系为
(7)
其中:Isc为激发电流;IDO为无光照时光伏电池的饱和电流;q为电子电荷量;A为光伏电池常数因子;K为玻尔兹曼常数;T为温度。
正梯度gk为
(8)
因此,电压的迭代计算公式为
UPVn=UPV(n-1)+akgk
(9)
其中:ak为电压增量系数。
当光伏电池工作点远离最大功率点时,光伏电池的输出电压以较大步长逼近最大功率点;当工作点靠近最大功率点时,光伏电池的输出电压以较小步长逼近最大功率点。最优梯度法在保留扰动观察法优点的基础上,能够平衡追踪速度和追踪精度之间的矛盾,在追求较高追踪速度的同时有较高的追踪精度。
文献[40]将最优梯度法应用于光伏水泵调速系统,可有效利用光伏电池的效率,抑制系统在最大功率点处的振荡。文献[41]在最优梯度法的基础上对电压增量系数ak进行了修正,以便提高系统的追踪精度。文献[42]提出结合最优梯度法和模糊控制的MPPT算法,以解决最优梯度法在最大功率点处小幅振荡的问题。
3 多峰MPPT算法
在实际应用中,光伏电池都是以光伏阵列的形式出现,当局部光伏组件无法正常工作或被阴影遮挡时,光伏阵列可能会出现多个峰值功率点,此时,最大功率点追踪由单峰值寻优变为多峰值寻优,而传统的单峰值MPPT算法因算法自身原理受限会陷入局部最优而无法找到全局最优功率点,无法有效利用太阳能。为了解决多峰寻优下的最大功率点追踪,新的MPPT算法应运而生。
3.1 群算法
利用群算法进行最大功率点追踪主要有粒子群算法[43-44]、蚁群算法[45]、猫群算法[46]、鸡群算法[47]萤火虫群算法[48]等,其中,应用最多的是粒子群算法。
粒子群算法来源于鸟类觅食的研究[49],通过在空间内随机选择带速度、位置信息和评价函数产生的适应值的粒子作为初始种群,不断迭代,最终搜索出最优值。利用群算法进行MPPT控制方法有3种[50]:电流控制、电压控制和占空比控制。每个粒子所在的位置信息即为该点处的电流、电压或占空比,粒子适应值为该点的输出功率,通过采样各个点处的功率值,计算下一次迭代时各粒子的位置,在多次迭代后最终收敛于全局最优点处。
粒子群算法控制简单,易于实现,但是容易收敛到局部极值点[51]且收敛速度慢。针对以上缺陷,在粒子群算法的基础上,提出了改进粒子群算法以及将粒子群算法结合其他算法进行最大功率点追踪,提高系统的收敛速度和准确度。引入非线性策略改进粒子群算法[52-53]、改进的莱维飞行粒子群算法[54]、权重指数递减的粒子群算法[55]、自适应粒子群算法[56-57]等改进粒子群算法较普通粒子群算法有较高的收敛速度和收敛精度。文献[58]利用模糊控制寻优速度快的优点提高了粒子群算法全局寻优能力并克服了寻优速度慢的缺点,文献[59]通过结合粒子群算法和遗传算法,可同时兼顾局部搜索和全局寻优能力。文献[60]提出的粒子群优化鱼群算法较2种基本算法有更快的收敛速度和更高的寻优精度。文献[61]结合模拟退火算法能快速跳出局部最优解以及混沌理论的遍历性优点,提出了模拟退火混沌粒子群算法,寻优速度和收敛稳定性有明显提升。
3.2 神经网络控制算法
BP神经网络是一种可以储存和学习输入-输出模式的映射关系,而不需要探究输入与输出间的数学关系的一种多层前馈网络。利用BP神经网络控制算法来进行最大功率点追踪,就是用外界的时间、光照强度和温度来预测可能的最大功率点[50]。文献[62]中所示求解的MPPT的神经网络图,输入层包含温度、光照和时间3个神经元,输出层为最大功率点电压1个神经元。神经网络控制算法需要预先采集大量系统数据来训练神经网络,完成输入到输出的映射关系。
文献[63-64]以时间、温度和光照强度作为输入量,最大功率点功率作为输出量,在复杂光照条件下可以快速准确地追踪到阴影状态下的最大功率点。文献[65]将光伏电池的输出功率和输出电压作为神经网络的输入神经元,利用光伏系统的占空比,通过扰动观察法获取神经网络所需的参数,系统具有良好的动态响应和较高的稳态控制精度。为了进一步提高系统的MPPT精度,利用模拟退火算法[66]和智能水滴算法[67]来优化神经网络的初始权值和阈值,建立模糊神经网络[68],均有效地提高了系统的追踪精度。
3.3 其他方法
近年来,为了追求更优的追踪速度和收敛稳定性,提出了多种方法相结合的融合算法来克服各种算法自身原理上的弊端,如通过模糊控制结合PID控制[69]、模糊控制结合神经网络[70]、斐波那契搜索法[71]、功率闭环法与扰动观察法和改进的猫群算法结合的复合式算法[72]、智能水滴算法优化支持向量机[73]、基于混沌优化和高斯变异的萤火虫算法[74]等均能提高最大功率点的寻优速度和抑制最大功率点处的振荡。
4 结语
在能源危机日益严重的今天,如何提高太阳能光伏系统的效率成为推动太阳能发展的主要动力。本文在介绍最大功率点原理的基础上,介绍了单峰和多峰MPPT算法,分析了各种MPPT的优缺点。而在实际应用过程中,因外界条件多变,多峰MPPT算法会成为今后研究的主流方向。而为了追求更优的追踪速度和收敛稳定性,多种算法融合的复合算法是今后研究的重点。
