基于改进PNGV建模的锂电池SOC估算研究
2020-07-06何明芳王顺利于春梅
何明芳,王顺利,于春梅,蒋 聪,王 露
(西南科技大学信息工程学院,四川 绵阳 621010)
0 引言
目前,锂电池因其高能量密度、高输出功率和高性价比的优点,在新能源领域得到了广泛的应用和发展。其应用范围已扩展到新能源汽车、航空、家电等行业[1]。因此,建立一套完整、科学的配套锂电池管理系统,对锂电池的安全合理使用起着至关重要的作用。有效的等效建模和精确的荷电状态(state of charge,SOC)估计是其中的关键[2]。在锂电池组的状态估计中,等效建模是获得电池特性和数学表达式的基石。根据电池模型的不同机理,锂电池等效模型可分为简单电化学模型、智能数学模型和等效电路模型。相比于电化学模型和智能数学模型,等效电路建模以试验数据为基础,采用构建电路模型的方法模拟电池的工作过程,基本不考虑其内部化学反应,适用性强。常见的等效电路模型包括: 内阻模型、戴维南模型、新一代汽车合作伙伴(partnership for a new generation of vehicles,PNGV)模型和通用非线性(general nonlinear,GNL)模型等。
锂电池的SOC是描述电池剩余电量的指标,也是电池使用过程中的重要参数之一。目前,锂电池SOC估计方法主要包括开路电压法、安培积分法、放电法、神经网络法、卡尔曼滤波法、粒子滤波法等[3]。开路电压法根据SOC与开路电压之间的近似线性关系来估计SOC;安培积分法通过在充电和放电期间的累积电量来估计SOC;神经网络方法通过处理锂电池的大量实时输入和输出数据来估计锂电池的充电状态[4];卡尔曼滤波方法通过连续迭代运算获得最小方差意义下的最优解[5]。随着研究的深入以及对锂电池SOC估算精度要求的进一步提升,研究人员也在不断探寻一些改进的方法,以实现对SOC的准确估算。
1 理论分析
1.1 等效电路模型
为了更直观地描述电池的影响因素和工作特性,可以建立电池的等效模型,并根据该模型写出电池外部特征量和内部状态量之间关系的数学表达式[6]。 考虑到锂电池的工作原理和特点,不断优化和结合常用等效电路模型的优点,通过对4.2 V/50 A三元动力锂电池进行容量测试和充放电试验,构建了一个基于PNGV的改进等效电路模型,以表征锂电池的工作状态。改进等效电路模型如图1所示。
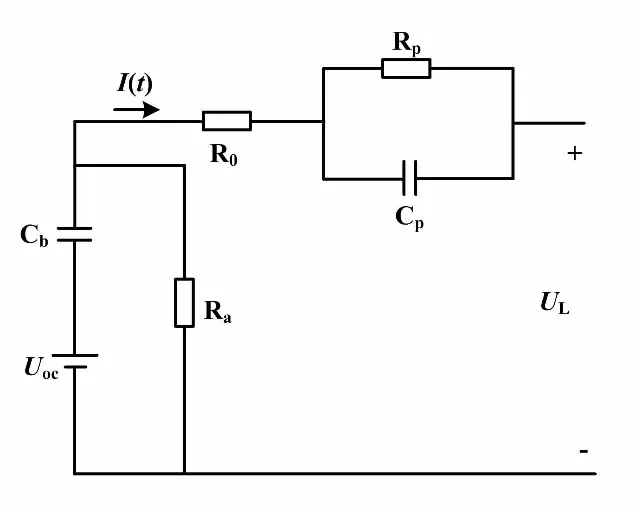
图1 改进等效电路模型
图1中:Uoc为锂电池的开路电压;R0为电池的欧姆内阻。由Rp和Cp组成的串联电路表示电池充放电过程中的极化效应,而Cb和Ra回路则表示电池长期储存时的自放电过程。根据电路的等效模型,放电方向被视为正方向,极化电容器两端的电压被定义为Up。根据基尔霍夫电压定律(Kirchhoff voltage law,KVL)定律,电路中的电压关系如式(1)所示。
UL=Uoc-Ub-U0-Up
(1)
根据欧姆定律,U0、Ub、Up和各自电流之间的关系如式(2)所示。
(2)
假设某一时段电流为0,对应于电池的搁置状态,即电路为零输入响应。假设Up的初始状态是0、电路为零状态响应,则将两个状态结合起来,即可得到通用形式的Up;将其离散化,如式(3)所示 。
(3)
离散形式的状态方程和输出方程适合进行算法迭代和程序实现,为之后的算法研究提供了可靠的依据。
1.2 SOC估算方法
新型的锂电池SOC预测方法有卡尔曼滤波(Kalman filter,KF)法、粒子滤波(particle filter,PF)法、模糊逻辑法和反向传播(back propagation,BP)神经网络算法等[7]。这些方法结合数学和计算机理论,实现过程较为复杂,但可以达到很好的估计效果,适应性较强[8]。
KF是由时域内的状态空间理论创立的滤波理论。它将被估计的信号视为在白噪声叠加下的一个随机线性系统的输出,由状态方程和观测方程在时间域内给出其输入输出方程。用KF估计SOC时,需要建立等效模型,并且卡尔曼算法的精度和模型的准确性密切相关。KF只适用于线性系统,扩展卡尔曼滤波(extend Kalman filter,EKF)算法用于估计非线性系统,将非线性的状态空间模型进行线性化,然后采用基本KF算法进行实现。求取状态方程和观测方程的偏导,得到状态方程和量程方程的泰勒级数展开式,将非线性映射函数进行线性化,可得到对应于卡尔曼滤波迭代计算的系矩阵[9]。
运用EKF估计锂电池SOC时,SOC是状态向量中的一个分量。电流作为控制量在输入参数中,输出为等效模型算得的端电压。系统噪声和观测噪声均为高斯白噪声,其方差表示为Q和R[10]。该方法通常以系统的状态和测量方程作为推导依据,预测状态方程中包含计算SOC的安时积分法,观测方程则体现锂电池的等效模型。假设系统的状态方程和观测方程如式(4)和式(5)所示。
xk+1=f(xk,uk)+ωk+1
(4)
yk+1=g(xk,uk)+vk+1
(5)
(6)
则式(4)和式(5)可表示为线性的状态方程和观测方程,如式(7)、式(8)所示。
(7)
(8)
对线性化后方程应用KF基本方程,便得到EKF滤波的递推过程。
①初始化:
(9)
②状态一步预测:
(10)
③误差协方差预测:
(11)
④卡尔曼增益更新:
(12)
⑤状态预测值修正:
(13)
⑥误差协方差修正:
(14)

针对改进后的等效电路模型而言,选取SOC、Up和Ud为所需的状态变量,UL为观测变量。则根据电路中的KVL,可得到如式(15)和式(16)所示的状态方程和观测方程。
(15)
(16)
式中:Δt为采样时间间隔;τp=RPCP;w为状态误差、v为测量误差,两者分别为协方差为Q和R的零均值白噪声。
状态转移矩阵A和输入矩阵B的含义可以从过程递归方程看出,如式(17)、式(18)所示。其为通过前一时刻状态获得下一时刻状态的驱动矩阵。
(17)
(18)
2 试验分析
2.1 混合脉冲功率性能测试及参数辨识
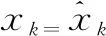
选择4.2 V/50 A的三元动力锂电池,进行混合脉冲功率性能(hybrid pulse power characterization, HPPC)测试,在SOC数值每间隔0.1进行一次脉冲测试。根据试验电压曲线进行参数辨识[11]。当SOC值为0.9时,脉冲测试电压曲线如图2所示。
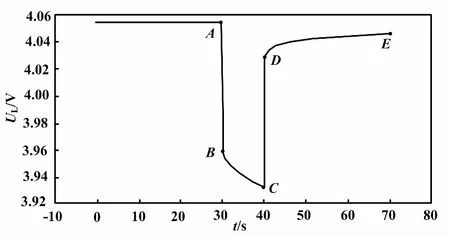
图2 脉冲测试电压曲线
根据每个SOC值对应的脉冲测试电压曲线,进行参数辨识。由试验曲线可知:AB段的电压下降是由于表征电池的欧姆内阻R0造成的。对此,可利用直接计算法辨识出R0的值,如式(19)所示。
(19)
类似地,Cb表征电流累计效应所产生的电压,可由点A至点E的电压变压计算得出。其计算公式如式(20)所示。
(20)
根据脉冲测试曲线的BC段,通过曲线拟合得到Rp和Cp。根据模型的KVL关系,可得其表达式如式(21)所示。
(21)
通过曲线拟合,可识别每个SOC点的参数,获得SOC值从0.1至1的开路电压(open circuit voltage,OCV)、欧姆内阻、极化内阻和极化电容数据。
不同SOC值下的参数辨识结果如表1所示。

表1 不同SOC值下的参数辨识结果
对于表征自放电效应的电容Cb,将充满电后的电池在恒温环境下搁置30天,检测其电压变化进而辨识Cb的值。由KVL可知,在搁置状态下的电压电流关系如式(22)所示。
(22)
试验测得初始Uoc为4.186 1 V,在搁置一个月后的电压为4.172 8 V,t=30×24×60×60=2 592 000,Cb取平均值为12 011 821.9。基于此,即可根据式(22)求得Ra,如式(23)所示。
(23)
2.2 模型验证
在获得模型各参数的数学描述后,有必要验证模型参数的准确性。将识别出的参数输入改进的等效电路模型,并输入与HPPC试验相同的电流变化;将模型的输出电压响应与实际电压数据进行比较,对模型进行验证,并根据验证结果对模型进行优化和改进。
模型验证的Simulink仿真图如图3所示。
图3 Simulink 仿真图
图3中,最大的模块内部即为等效电路模型。其输入自上而下分别为HPPC测试输入电流I、欧姆内阻R0、极化内阻Rp、极化电容Cp、表征电流累积效应的电容Cb、表征自放电效应的电阻Ra和开路电压Uoc。SOC的实时变化可以从图3中的安时积分模块获得。经过测试,各模型参数取不同SOC下的平均值,即可很好地跟随实际输出电压。因此,整个模型的控制量是输入电流值,响应量是模型的端电压,从而可模拟锂离子电池的运行[12]。
模型验证输出曲线如图4所示。如图4(a)所示,U1是实际的电池输出端电压,U2是该模型下的输出端电压。通过图4(a)可以看出,模型输出端电压与实际值吻合较好,说明该等效电路模型的合理性,也证明了参数识别方法的可行性和可靠性。
从图4(b)可以看出,模型在整个过程中没有发散,最大的误差发生在功率脉冲测试阶段。这是因为电池输入电流的突然变化,导致端电压的快速变化。从曲线可以看出,其最大误差不超过0.06 V,锂离子电池的最大电压为4.2 V。因此,模型的精度可以达到98%以上,由此证明了该等效模型能较为准确地表征锂电池的工作特征。
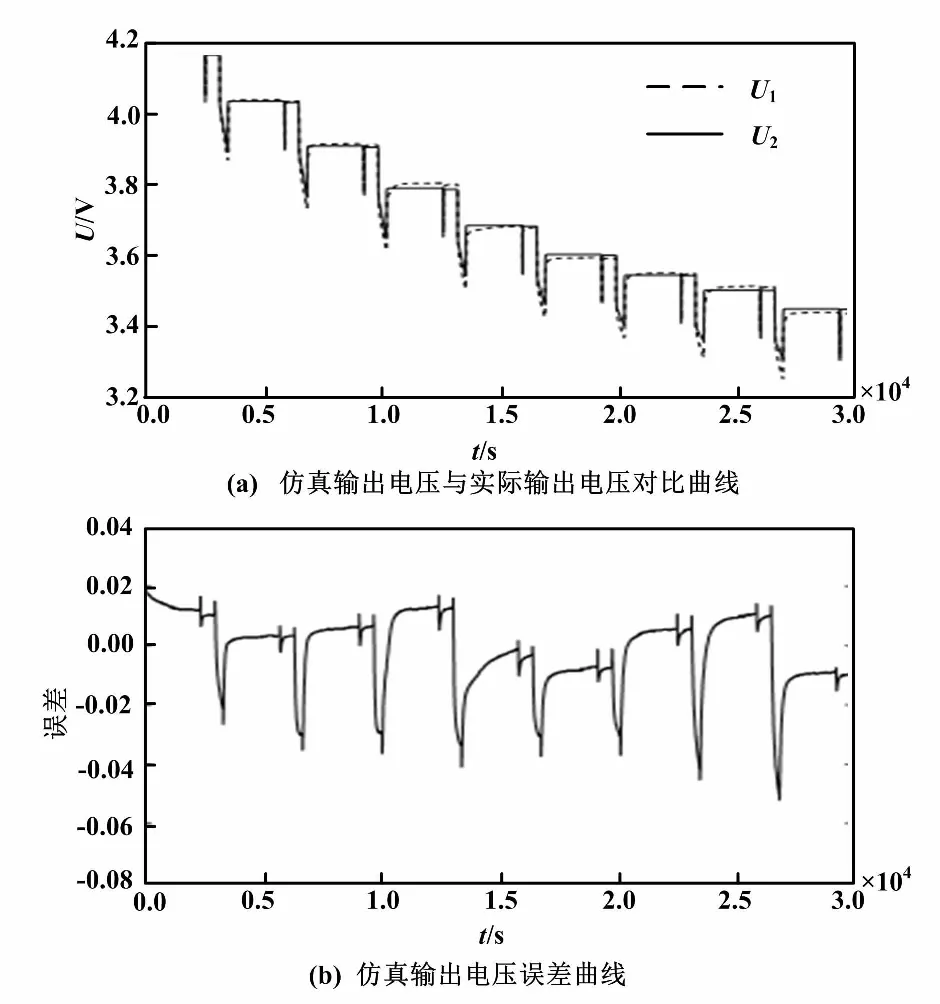
图4 模型验证输出曲线
2.3 算法验证
在一系列试验研究和理论分析的基础上,根据上述等效电路模型,利用试验数据对基于EKF的SOC估计算法进行了仿真。原始数据为恒流条件下的试验数据。通过仿真试验比较安时积分和EKF算法的估计效果,验证算法的可行性和有效性。被验证的真实状态以最小时间间隔的安时积分测量为标准,并以此作为比较,检查恒流条件下的状态输出效果。
安时积分法、EKF算法与真实值对比曲线如图5所示。
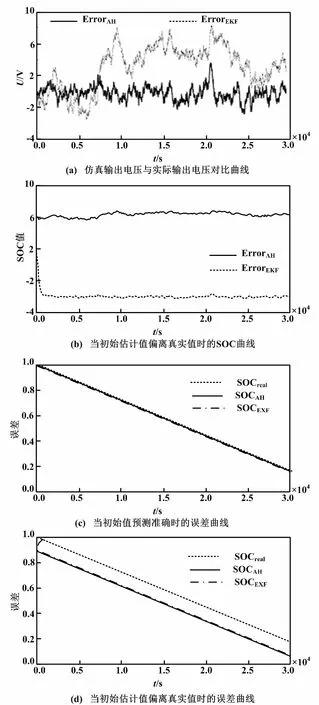
图5 安时积分法、EKF算法与真实值对比曲线
利用数据模拟实际运行条件,在Matlab环境中重新定义数据的有效数量,以服从随机噪声的正态分布。也就是说,将平均值为零、方差为r的高斯白噪声(Gaussian white noise,GWN),叠加在输入数据上,模拟实际观测到的端电压值。该数据用作SOC估计更新的端电压比较。输入模拟噪声的观测电压,通过基于改进等效电路模型的EKF算法的预测和更新处理,输出SOC估计值。根据安时积分法,从原始电流数据中叠加方差矩阵为Q的过程噪声矩阵,通过运算得到状态向量,作为实向量。将算法的仿真输出状态与仿真真实状态进行比较,验证模型和算法的准确性和稳定性。在实际应用中,SOC的初始值可以从之前记录在电池管理系统(battery management system,BMS)中的状态量中获得。但是在电池使用的初始阶段,极化效应并不明显,所以极化电压的初始值可以认为是0。误差协方差矩阵的初始值P0的确定可以从初始状态的X0误差中获得。在应用中,初始值应尽可能小,以加快算法的跟踪速度。图5(a)和图5(c)将初始估计值设置为真实值。从图5(c)可以看出,随着时间的推移,安时积分的误差累积效应变得越来越明显,并且其估计值和实际曲线之间的偏差变得越来越大。这主要是因为安时积分法是一种单向估计方法,没有反馈校正环节,导致误差积累现象。然而,EKF的估计曲线总是跟随真实值,并围绕它轻微波动。从误差曲线可以看出,EKF的估计误差始终小于1%,表现出良好的稳定性。图5(b)和图5(d)将初始估计值设置为偏离真实值,以模拟初始值不准确的情况。这里,将初始估计值设置为0.9,而真实值为1。运行仿真模型,检查算法的输出波形是否自动收敛到实际值波形。分析输出结果可知,EKF算法在初始值错误的情况下具有自适应调整的能力。在短时间内,SOC估计值收敛到真实值,并且可以保证98%以上的估计精度。
3 结论
在对三元动力锂电池进行大量试验的基础上,充分考虑了锂电池的极化效应和电流积累效应,并基于改进的PNGV模型,建立了一种新的等效电路模型。利用HPPC试验曲线进行参数辨识,并在Simulink中进行验证,实现了对锂电池工作过程的准确描述。考
虑到锂离子的非线性工作特性,建立了一种基于EKF估计方法来估计锂离子的SOC。仿真平台证明了EKF算法的自适应校正能力。该算法能够很好地实现SOC在线估计。
