俄罗斯飞机模型动态试验与失速/过失速模态研究回顾
2020-07-06颜巍
颜 巍
(上海飞机设计研究院,上海 201210)
0 引言
飞机的飞行力学特性是由牛顿第二定律所决定的:即F=m×a,这里加速度“a”综合了气动力(升力和阻力)、发动机推力等,表征了飞机的气动特性,质量“m”糅合了飞机的质量与质量分布因素,表征了飞机的惯性特性,所以飞机的飞行力学特性由空气相对运动所作用在机体表面的气动力特性和由飞机自身所固有的惯性力特性综合决定,如图1所示。
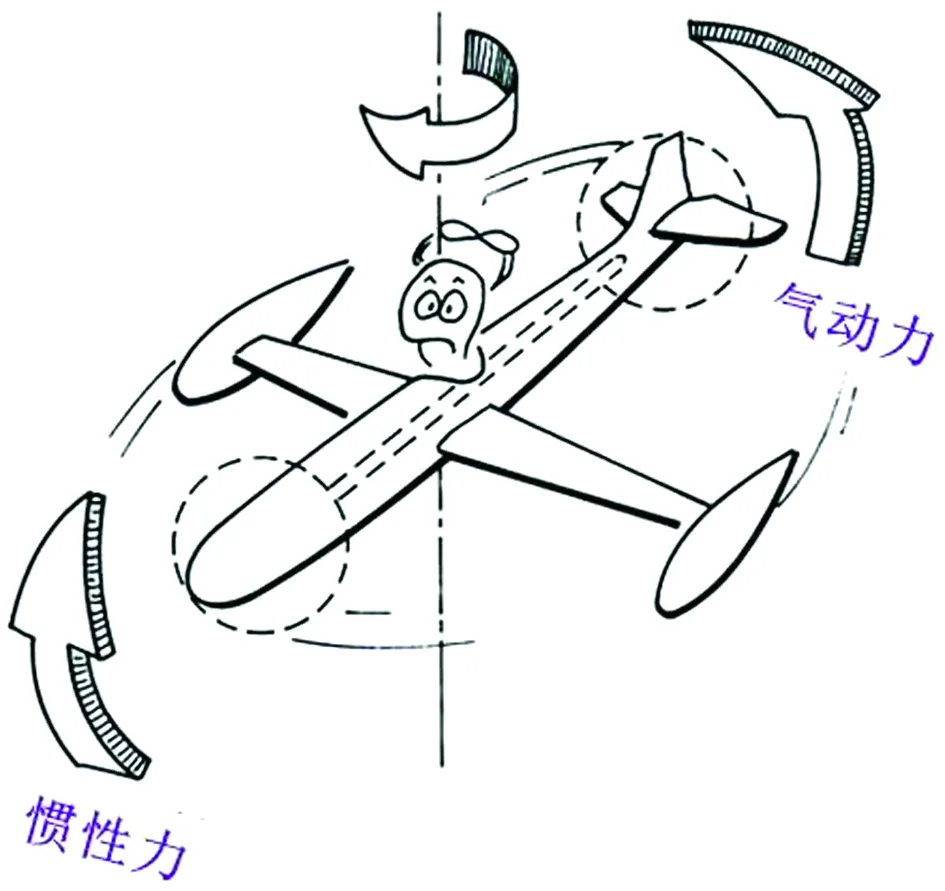
图1 气动力与惯性力的相互作用
飞机在小攻角条件下直线稳态飞行,飞机的气动特性取决于飞机的气动布局、气动外形、飞行高度、飞行速度等。在正常使用范围内,即使飞机本体短暂地受到外界的小范围扰动,其本体一般也具备抗拒扰动的能力,所以其气动力能够与模拟飞行雷诺数、相似马赫数的风洞试验结果基本一致,此时飞机本体的惯性特性并不完全展露;但当飞机处于临界攻角附近或超过/大大超过临界攻角时,由于飞机已无法保持直线稳态飞行,飞机质量特性对飞机运动特性的影响开始展现,即本体惯性特性(质量分布)促使绕飞机体轴系下三轴的振荡逐渐明显,并伴随着不同强-弱交替的惯性交感运动。即使通过增压风洞/低温风洞获得模拟飞行雷诺数、相似马赫数条件下的气动力数据,但由于没有引入(模拟)飞机的质量特性,其临界攻角附近,超临界攻角条件下的数据已不能呈现真实的飞机运动特性,所模拟的过渡过程是有缺陷的[1]。
动态试验(模型自由飞试验)是研究空气动力学与飞行力学的三大手段之一,通过模型自由飞试验可以获得在临界攻角附近(失速),超临界攻角条件下(过失速)真实的飞机动态失速/过失速(尾旋)特性与完整的过渡过程[2]。
本文重点回顾了前苏联/俄罗斯各飞机设计局利用动态试验技术对飞机失速、过失速(尾旋)的研究。
1 本文所涉及的前苏联/俄罗斯各飞机设计局所设计的飞机介绍
前苏联/俄罗斯的飞机设计流程分为四个阶段[3]:
1)航空工业部按照需求下达飞机研制任务;
2)飞机设计局进行飞机设计;
3)风洞试验机构进行飞机模型风洞试验研究;
4)飞行试验机构进行最终试飞鉴定。
下面对本文所涉及的飞机进行简要的介绍:
Tu-334是由图波列夫设计局于1990年设计并制造的中型客机,Tu-334为高平尾尾吊发动机布局,机身为Tu-204客机的缩短版本,采用两台扎波罗什-进步设计局研制的D-436T-1涡轮风扇发动机作为动力,飞机的最大起飞重量为48 t。
IL-62是由伊留申设计局于1962年开始设计并制造的大型远程客机,可不经空中加油从莫斯科直飞纽约,IL-62为高平尾尾吊发动机布局,采用四台库兹涅佐夫设计局研制的HK-8涡轮风扇发动机作为动力,飞机的最大起飞重量为165 t。
IL-114是由伊留申设计局于1982年设计并制造的中型客机,IL-114为常规双发螺旋桨布局,采用两台克里莫夫设计局研制的TV7-117涡轮螺旋桨发动机作为动力,飞机的最大起飞重量为21 t。
YaK-130是由雅科夫列夫设计局于上世纪末设计并制造的高级教练机,双发常规布局,并具备一定的作战能力,采用两台伊夫琴科-进步设计局研制的AL-222-25涡轮风扇发动机作为动力,飞机的最大起飞重量为10.3 t。
MC-21是由雅科夫列夫设计局于2010年前后开始设计并制造的大型客机,MC-21为常规下单翼翼吊发动机布局,采用两台俄罗斯联合发动机集团提供的PD-14涡轮风扇发动机作为动力,飞机的最大起飞重量为73 t。
Su-27是由苏霍伊设计局于20世纪70年代设计并制造的第三代重型战斗机,常规双垂尾布局,采用两台留里卡-土星设计局研制的AL-31F涡轮风扇发动机作为动力,飞机的最大起飞重量为33 t。
Su-47是由苏霍伊设计局于20世纪90年代开始设计并制造的验证飞机,Su-47为前掠翼布局,采用两台留里卡-土星公司研制的AL-41F涡轮风扇发动机作为动力,飞机的最大起飞重量为34 t。
SSJ-100是由苏霍伊设计局于2000年前后开始设计并制造的中型客机,SSJ-100为常规下单翼翼吊发动机布局,采用两台留里卡-土星设计局的SaM146涡轮风扇发动机作为动力,飞机的最大起飞重量为46 t。
Mig-29是由米高扬设计局于20世纪60年代末设计并制造的第三代重型战斗机,常规双垂尾布局,采用两台克里莫夫设计局研制的RD-33涡轮风扇发动机作为动力,飞机的最大起飞重量为20 t。
Mig-1.44是由米高扬设计局于1983年前后开始设计并制造的隐身战斗机,Mig-1.44为鸭式布局,采用两台留里卡-土星公司研制的AL-41F涡轮风扇发动机作为动力,飞机的最大起飞重量为35 t。
An-124是由安东诺夫设计局于1972年开始设计并制造的重型运输飞机,An-124为上单翼翼吊发动机低平尾布局,采用四台扎波罗什-进步设计局设计的TRDD D-18T大涵道比涡轮风扇发动机作为动力,飞机的最大起飞重量为405 t。
An-148是由安东诺夫设计局于2001年设计并制造的中型客机,An-148为上单翼翼吊发动机高平尾布局,采用两台扎波罗什-进步设计局设计的D-436-148涡轮风扇发动机作为动力,飞机的最大起飞重量为40 t。
2 动态试验的模拟飞行阶段
飞机在进行失速试飞时,试飞员通过拉杆将飞机带入失速状态,当飞机进入过失速区域时,由于升力系数的下降与左、右机翼的不对称流动使得飞机出现非指令的机翼自转现象,自转现象是飞机初始尾旋的征兆,如果不加干预,在俯仰与滚转的耦合运动下飞机开始出现明显的非指令偏航运动,经过一段时间的发展直至稳定尾旋状态[4]。
对于研究飞机的动态失速-偏离模态,采用水平风洞模型自由飞试验技术可以研究,其模拟的范围如图2 a)所示,在前苏联/俄罗斯的科研记录里,没有采用该试验技术的任何记录。
对于研究飞机的动态过失速(尾旋)特性,采用尾旋风洞模型自由飞试验技术或旋转天平试验技术可以研究,其模拟的范围如图2 b)所示,在前苏联/俄罗斯的科研记录里,该项试验在TsAGI进行。
对于研究飞机的失速-偏离-尾旋-改出的全过程,采用大气环境模型自由飞试验技术可以研究,其模拟的范围如图2 c)所示,在前苏联/乌克兰的科研记录里,该项试验由乌克兰哈尔科夫航空技术研究所牵头进行。
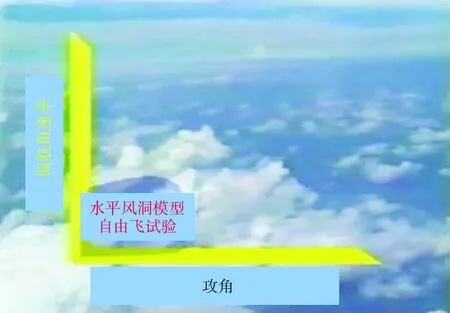
a)水平风洞模型自由飞试验模拟范围

b)尾旋风洞模型自由飞试验模拟范围
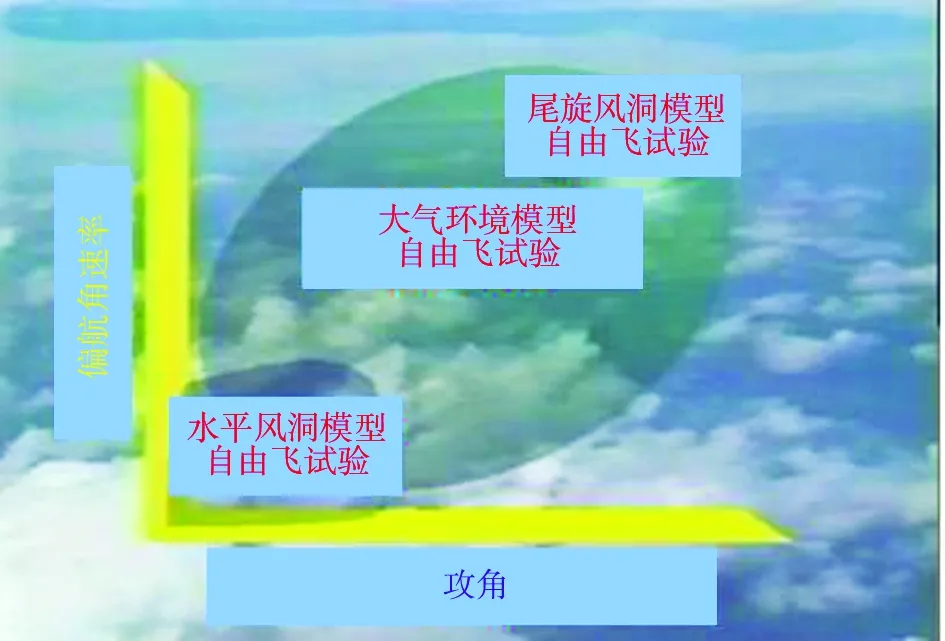
c)大气环境模型自由飞试验模拟范围图2 不同动态试验的模拟飞行阶段
3 飞机失速/过失速特性与风洞试验
前苏联/俄罗斯进行动态失速/过失速研究在TsAGI的T-105 Ф4.5 m尾旋风洞进行,分为两类试验:风洞模型自由飞试验和旋转天平试验[5]。
战斗机、歼击机、教练机在飞行中有过失速机动的战术动作和特种飞行训练的要求,按照军用航空条例强制要求进行尾旋风洞试验,如图3~图4所示。通过尾旋风洞试验确定飞机的尾旋模态与最佳改出方式。
商用旅客机在商业运营中不允许进行大攻角失速/过失速飞行,在鉴定试飞中进行失速演示,但不进行尾旋试飞,但飞机研制单位仍然对过失速(尾旋)特性进行研究,目的在于摸清飞机的过失速模态,将潜在的不利因素充分的挖掘,针对不安全因素提出正确的处置方式,给试飞员以足够的试飞信心。部分商用旅客机的尾旋风洞试验如图5~图10所示。
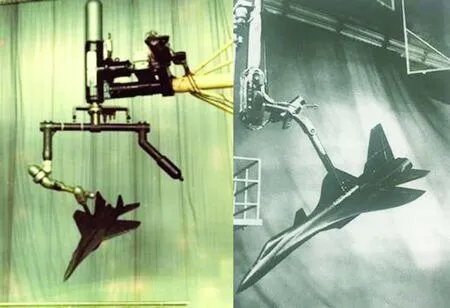
图3 Mig-29和Su-27战斗机的旋转天平试验

a)自由飞尾旋试验

b)旋转天平试验图4 Yak-130教练机尾旋风洞试验

图5 IL-62大型客机自由飞尾旋试验

图6 IL-114中型客机自由飞尾旋试验
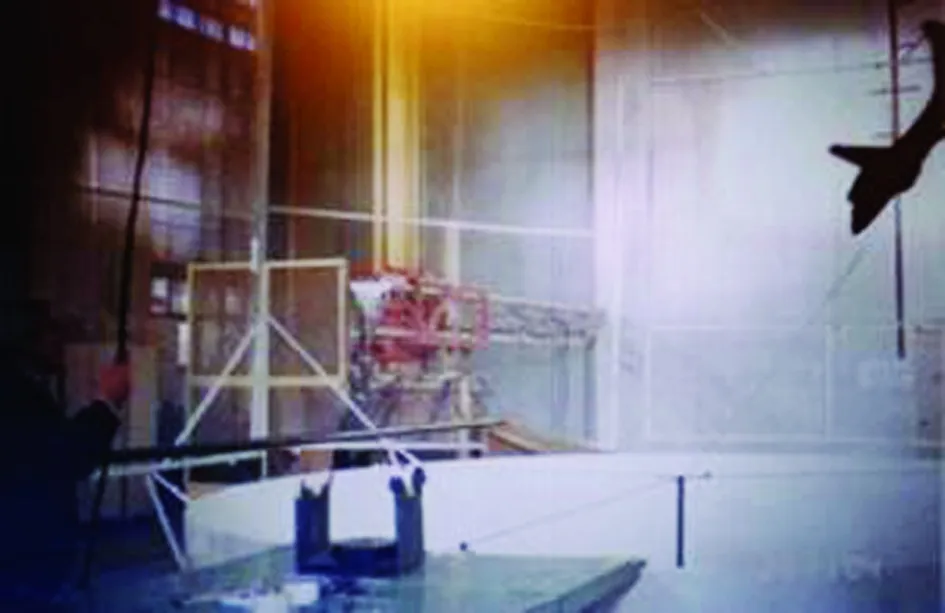
图7 An-148中型客机自由飞尾旋试验

图8 Tu-334中型客机自由飞尾旋试验

图9 SSJ-100支线客机旋转天平试验

a)自由飞尾旋试验

b)旋转天平试验图10 MC-21大型客机尾旋风洞试验
除以上两种过失速(尾旋)试验方式外,SibNIA的T-203低速风洞利用了风洞虚拟飞行试验技术研究了飞机的稳定尾旋特性[6-7],如图11所示。

图11 Su-27战斗机模型虚拟飞行试验
通过以上这些对飞机的最严酷状态下进行的研究,确定了飞机在某种最严酷状态下的飞行模态,以及是否具有改出该严酷状态的能力。但这种研究方法的缺点是,这些严酷状态的建立是人为的,并非飞机自然失速后所发生的连续现象的结果,所以缺少进入阶段的数据,对于飞机动态失速/过失速的研究并不完整。
4 大气环境模型自由飞试验
大气环境模型自由飞试验是检验飞机失速-过失速(尾旋)特性完整过程的动态飞行试验。通过该项试验可以考察飞机的失速模态、偏离特性、过失速尾旋特性、以及飞机失速/尾旋的改出能力。在前苏联航空历史上采用了火箭助推式和母机带飞式两种技术进行模型自由飞试验。哈尔科夫航空技术研究所擅长采用火箭助推式进行模型自由飞试验[8],如图12所示。

a)Su-27战斗机模型

b)火箭助推自由飞试验图12
通过火箭助推模型自由飞试验,深入研究了Su-27飞机的失速-过失速(尾旋)特性,并且首次飞出了著名的“眼镜蛇”动作,比普加乔夫驾驶Su-27原型机飞出“眼镜蛇”动作还要早。
格罗莫夫飞行试验研究院和中央流体力学研究院主要采用大型轰炸机和直升机带飞模型进行自由飞试验[3][8],如图13~图16所示。
通过模型自由飞试验不仅获得了尾旋风洞所能够获取的过失速最严酷状态,也获得了从自然失速到最严酷状态的完整过渡过程,从飞行的物理意义上讲也是验证了飞机全域稳定性分析的结果[9],即从低海拔平衡区域向高海拔平衡区域的跃迁过程、分支突变点、突变的剧烈程度等,如图17所示。此外大气自由飞试验的模型比例比尾旋风洞试验模型要大的多,能更加真实的反应飞机的失速/过失速飞行特性。

图13 Su-27战斗机模型投放式自由飞试验(母机:Tu-16LL)

图14 Mig-1.44模型投放式自由飞试验(母机:Tu-16LL)

图15 Su-47验证机模型投放式自由飞试验(母机:Mi-24)
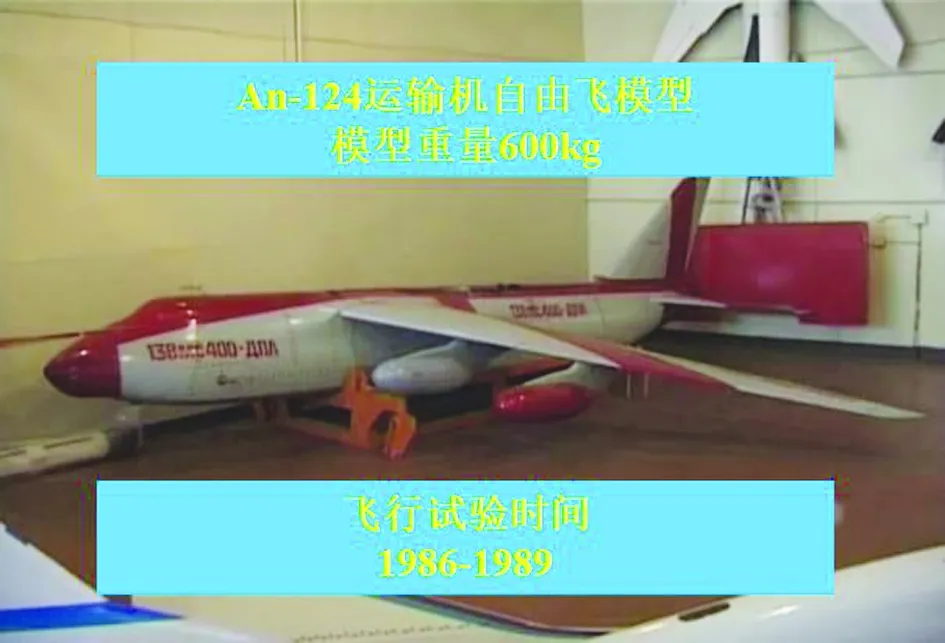
图16 An-124运输机投放式自由飞试验模型(母机:固定翼飞机)
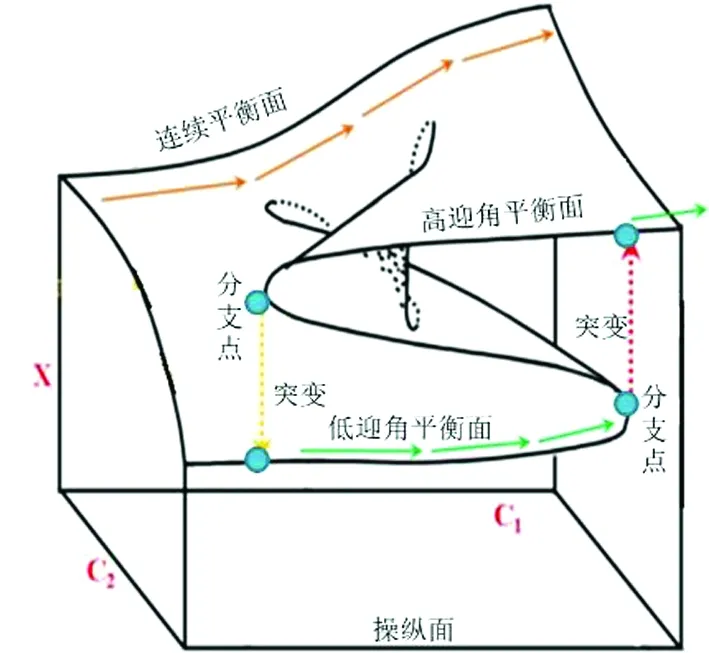
图17 飞机全域稳定性分析示意图
5 动态试验的分析流程
飞机模型动态试验获得的是在当地流场条件下的一系列参数[10],气流夹角а、β,模型过载Nx、Ny、Nz,模型角速率p、q、r,模型角加速度dp/dt、dq/dt、dr/dt,模型飞行速度V,模型气压高度H,模型GPS定位,模型舵面偏角δ,结合试验前所进行的模型质量特性调试结果(IXX,IYY,IZZ),如图18所示[11],可以逐步回归飞机模型在动态飞行中的气动力。
以飞机偏航方向的运动为例,如式(1)[12]。

(1)
体轴系下的角速度与欧拉角之间的关系如式(2)所示。

图18 Su-27飞机18.2%模型质量分布

(2)
求取p、q、r对时间的导数,然后将角速度、角加速度、惯量特性数据、模型特征参数、飞行特征参数等糅合入偏航力矩公式,如式(3)所示。

(3)
利用该表达式可以还原飞机模型在拉杆失速、偏离、尾旋中偏航力矩总量值随时间轴的连续变化趋势。
在此基础上还要进行细致的系统辨识技术,将气动力导数进行回归还原。偏航力矩总量的表达式包含了静态导数、动态导数、旋转导数、交叉倒数和高次项导数,如式(4)所示。
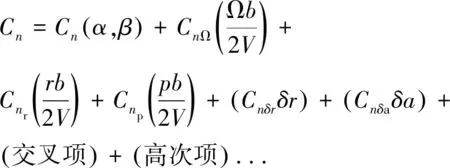
(4)
在辨识的一开始,可以将交叉项和高次项尽可能的考虑全面,然后用逐步回归法将表达式中的次要项尽可能的简化。某飞机模型动态试验的失速-过失速过渡过程中偏航力矩经过逐步回归后的计算方式,如式(5)所示。
即:
将所辨识的静/动导数与参考值进行对比,参考值中,静导数和舵面偏转导数来源于静态测力试验,动导数来源于动导数风洞试验,如表1所示。
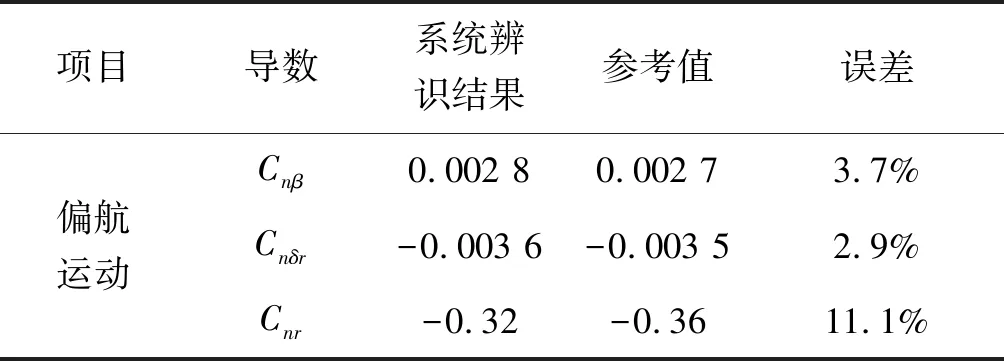
表1 系统辨识与风洞试验结果比较
表中的误差表明经过逐步回归后的偏航力矩表达式是可以表征飞机在连续运动中的气动力矩的变化。
6 结论
回顾了前苏联/俄罗斯在研制飞机过程中利用动态试验技术(尾旋风洞试验和模型自由飞试验)来研究飞机的失速、过失速(尾旋)问题,为国内研制大型飞机提供参考。不难看出:前苏联/俄罗斯军机、民机均进行了飞机的失速-过失速(尾旋)研究,均通过了尾旋风洞试验确定飞机的尾旋模态与最佳改出措施;通过多种高、低速飞机缩比模型自由飞试验技术在真实大气环境内研究飞机的失速-偏离-尾旋-改出的全部过程。通过这些研究确定了原型机边界/超边界飞行的可行性,降低了危险科目飞行的风险,增强了试飞员的飞行信心。
