民用飞机侧滑角传感器安装位置数值研究
2020-07-06孙学卫李启明
陈 超 孙学卫 李启明 杜 玺
(1. 北京民用飞机技术研究中心,北京 102211; 2. 上海飞机设计研究院,上海 201210)
0 引言
侧滑角是飞机的重要气动参数之一,侧滑角是否准确测量会影响飞机的操纵和安全飞行。侧滑角可以通过旋转风标式攻角侧滑角传感器或者差压管式攻角侧滑角传感器进行测量。
旋转风标式攻角侧滑角传感器是由具有对称剖面翼型的叶片、转轴、角度变换器(霍尔线圈)等部件组成。当叶片的对称面平行于气流方向时,即气流相对叶片攻角和侧滑角都等于零时,气流作用在叶片两侧的气动力相等从而使叶片不发生旋转;而当气流相对叶片对称面的攻角或者侧滑角不等于零时,叶片两侧的气动力不相等,在气动压差的作用下叶片发生旋转,当叶片对称面旋转到与气流方向平行时叶片到达新的平衡位置。角度变换装置把叶片旋转的角度转换成电信号进行后续处理。
差压管式攻角侧滑角传感器是利用五孔或七孔压差管相对气流在不同攻角时上下孔之间会产生压差,而在不同侧滑角时左右孔之间会产生压差的原理进行测量。
旋转风标式传感器相比于差压管式传感器其测量范围大精度也高,现代民用飞机的攻角、侧滑角传感器大多采用风标式传感器,如波音的737、747和787系列,空中客车公司的A320、A330和A340等[11],因此本文研究的侧滑角传感器也是风标式传感器。
国内近些年对飞机侧滑角的研究主要集中在侧滑角传感器的设计,侧滑角的测量和校准试飞等方面。杨帅等人[1]设计了一种满足在大攻角状态需求下的风标式侧滑角传感器,汪磊[2]设计了一种风标式攻角侧滑角传感器并实现了对攻角和侧滑角的精确测量。叶玮等人[3]提出了一种结合嵌入式大气传感器和惯性导航系统对攻角、侧滑角测量修正的方法。马航帅[4]等人研究了结合惯性导航系统与飞行控制系统进行大攻角高机动飞行环境下的攻角和侧滑角估算方法。肖冠平和陈静杰[5]利用快速存储记录器中的飞行参数提出了一种民机侧滑角估算方法。针对静压法测量侧滑角的方法,李永平和贾慈力[6]利用CFD方法提出了基于压差系数与侧滑角关系模型。冯铭瑜等人[7]改进了实验室侧滑角传感器校准方式从而减小校准过程中的重复性误差。王晓江等人[8]提出了一种基于GPS数据的飞机侧滑角校准方法。邓俊[9]分析了前支杆侧滑角风标法、机身侧滑角风标法和静压差三种侧滑角测量方法了,证明了采用航向航迹法能有效的对侧滑角测量进行校准。倪晔[10]则从项目管理的角度对如何实施前支杆侧滑角风标法、机身侧滑角风标法和静压差三种侧滑角测量和航向航迹法校准侧滑角进行了总结。
侧滑角安装定位技术研究在国内外的公开文献较少,国内近年来主要对攻角传感器的安装位置开展了一些研究。赵克良等人[11]采用数值模拟的方法对翼身组合体进行了计算,通过对侧滑敏感性分析和攻角校线分析得到了风标式攻角传感器的安装位置规律。陈功和李秋捷[12]采用CFD计算的方法确定了风标式攻角传感器和静压传感器的合理布局,并通过试验测量进行了验证。席敬泽和张辉[13]通过分析CFD计算得的机头流场初步确定了风标式攻角传感器的安装位置。汪发亮等人[14]利用CFD方法对机头和前机身的流场进行分析来选择合理的大气传感器合理安装位置。汤黄华[15]分析了机身曲线上压力系数等于零的分布情况,对压差式攻角传感器安装位置规律进行了理论分析。
侧滑角传感器的安装定位不仅会影响传感器自身对侧滑角的测量精度,而且气流在经过传感器后产生的尾迹涡可能会对机头上布置的其他传感器产生影响,因此与对攻角的安装定位技术一样,同样需要对侧滑角传感器的安装定位进行研究。
本文采用CFD方法对机头机身构型以及机头机身加侧滑角传感器构型进行了数值模拟,分析了机头附近当地侧滑角与来流侧滑角之间的关系、传感器安装位置对当地侧滑角和机头两侧当地攻角的影响及尾迹区域,得到了侧滑角传感器合理安装位置和对两侧迎角传感器影响区域,对型号设计具有较实用的参考价值。
1 计算方法
本文主要目的是研究侧滑角传感器安装定位及侧滑角传感器对机头两侧流场分布的影响,因此CFD计算采用了三种构型即:全模干净机身,干净机身加上在机头两种不同位置分布的侧滑角传感器构型。机头上布置了3只侧滑角传感器,中间侧滑角传感器的对称面在来流无侧滑角时与机身的对称面重合,外侧两只侧滑角传感器相对机身对称面对称布置。两种安装位置分布如图1所示,构型1(黄色)的两外侧传感器离机身对称面较近,构型2(红色)的两外侧传感器离机身对称面较远。

图1 侧滑角传感器安装位置
巡航状态下侧滑角传感器安装位置的影响为本文关注点,因此来流马赫数Ma为0.85,来流攻角为AOA = 2°,计算干净构型的来流侧滑角范围为0°~ 20°。根据干净构型计算结果可以得到在不同来流侧滑角下机头上的当地侧滑角分布,提取侧滑角传感器转轴处的当地侧滑角并使侧滑角传感器叶片绕其转轴做相应角度的偏转便可得到在此来流攻角和侧滑角下侧滑角传感器的近似平衡位置。在这里需要说明的是,干净构型得到的侧滑角传感器偏转角度位置并不是严格意义上的侧滑角传感器的平衡位置,侧滑角传感器的平衡位置需要通过求解传感器上的气动力并通过位置迭代更新来确定,这需要采用流固耦合方法来确定侧滑角传感器平衡位置,这种方式过程相对繁琐、计算量大,目前在工程实践中使用较少。通过采用计算干净构型机头处的当地侧滑角然后对侧滑角传感器叶片进行对应旋转的方法更为实用。
为了分析来流攻角对侧滑角传感器尾迹偏转的影响,对来流攻角在-2°时的工况也进行了计算,全部计算工况如表 1所示。
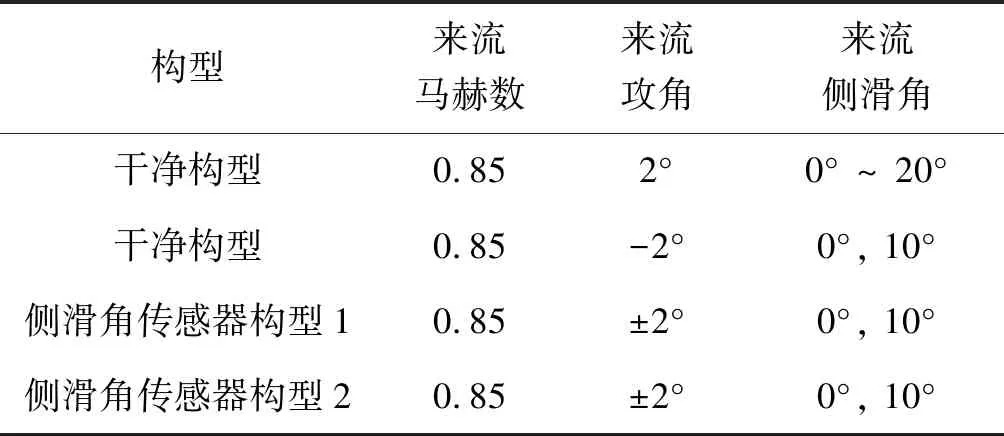
表1 计算工况
CFD计算采用非结构化网格,机身和传感器表面网格以四边形为主混合少量三角形网格,如图2(a)和(b)所示;边界层网格为壁面网格沿法向向外推进,壁面网格为混合网格因而边界层网格包含六面体和三棱柱如图2(c)所示,第一层网格y+≈1;体网格主要为四面体网格,边界层交界面含有四边形网格,因而体网格也包含金字塔网格,如图2(d)所示。
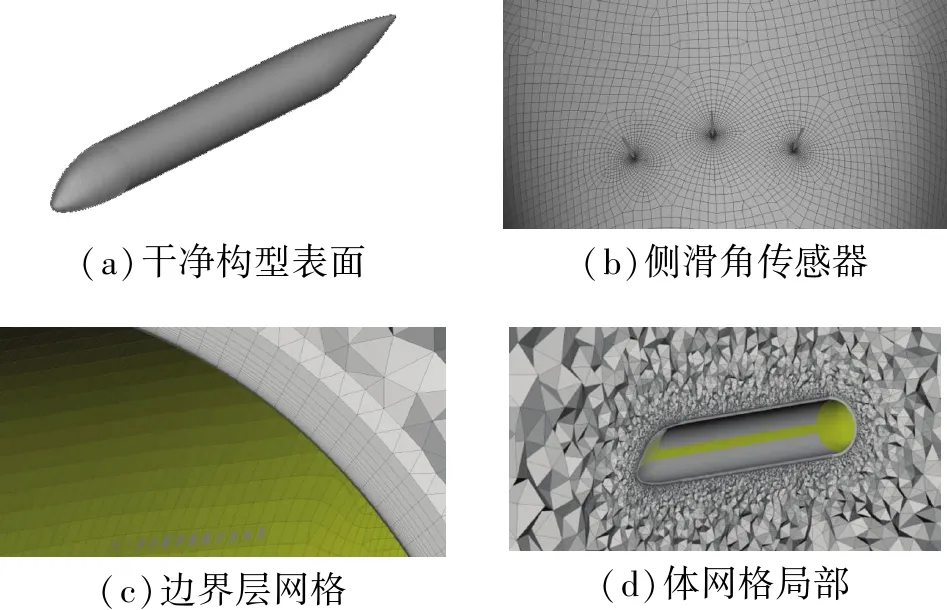
(a)干净构型表面(b)侧滑角传感器(c)边界层网格(d)体网格局部
图2计算网格
为了验证计算结果网格无关性,进行了不同网格数量的计算比较,最终选择适中的网格量进行计算和分析,干净构型的网格单元数为880万,传感器构型网格数为1 205万。
2 计算结果与讨论
2.1 当地侧滑角定义及计算
风标式侧滑角传感器通过测量风标相对对称面偏转的角度来测量当地侧滑角,因而本文中机头当地侧滑角定义为当地速度矢量在机头法向偏移面上通过该点的切平面上的投影分量与机身对称面的夹角,与文献[16]中当地侧滑角的定义有所不同。如图3所示,Oxyz为全局坐标系,O′x′y′z′为当地坐标系,O′为机头偏移面上当地速度点,x′O′z′为机头偏移面上通过O′点的切平面,O′x′ 为通过该点O′的切平面与机身对称面的交线,O′y′ 为通过O′的机头法向向量,O′z′ 通过右手法则确定。
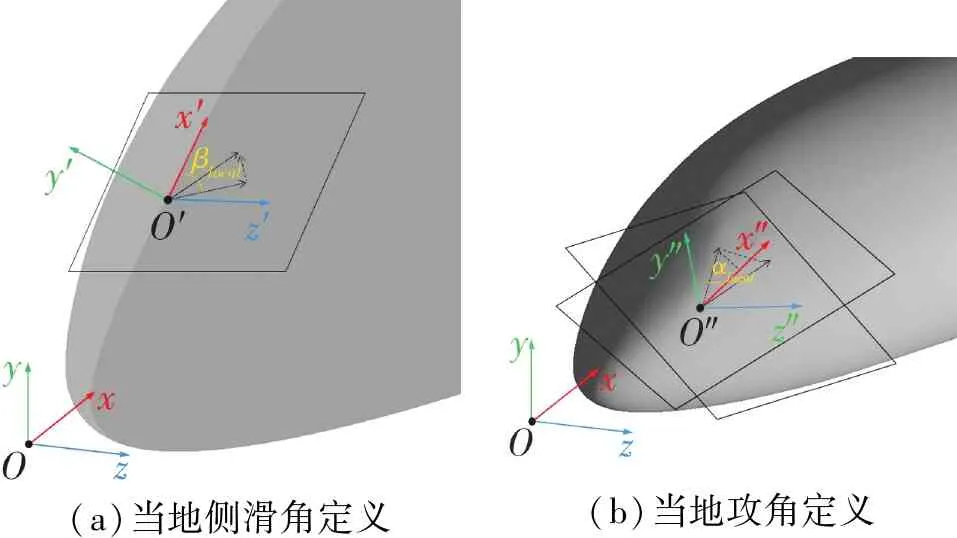
(a)当地侧滑角定义(b)当地攻角定义
图3当地侧滑角和当地攻角及相应当地坐标系的定义
当地坐标系三个单位方向向量表示为(ex′,ey′,ez′),点O′(x0,y0,z0)。O′y′为通过O′的机头法向向量(nx,ny,nz)在机身对称面上的投影,因此:
ey′=(nx,ny,nz)
(1)
通过O′的切平面为:
nx(x-x0)+ny(y-y0)+nz(z-z0)=0
(2)
O′x′为通过该点O′的切平面与机身对称面平行的平面z=z0的交线,则:
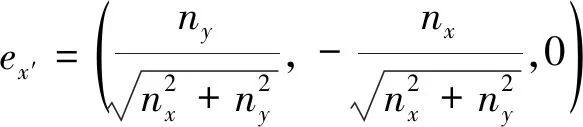
(3)
O′z′为O′x′和O′y′的向量积:
ez′=ex′×ey′
(4)
可以得到:

(5)
当地速度在局部坐标系上的三个分量为速度矢量与当地坐标系单位方向向量的点积:
当地侧滑角定义为:
(9)
根据以上当地侧滑角的定义,可将CFD计算得到的速度矢量进行分解得到当地侧滑角的分布。
2.2 当地攻角定义及计算
当地攻角的当地坐标系为O″x″y″z″,其中x″O″z″平面为机头偏移面上通过O″的切平面,O″y″轴为该切平面的单位法向向量,O″x″轴为该切平面与通过O″水平面的交线,O″z″通过右手法则确定,如图3(b)所示,类似于当地侧滑角局部坐标系的计算可得:
当地攻角在局部坐标系下的定义如下:
(13)
2.3 当地侧滑角分布
在Ma=0.85且来流攻角AOA = 2°时,机头表面的边界层厚度在3 mm ~15 mm,边界层厚度从机鼻处沿流向方向逐渐增加。风标传感器的叶片高度为70 mm~90 mm[11],考虑到传感器旋转臂的高度,选择机头沿法向等距偏移50 mm的曲面作为当地侧滑角数据分析面,该机头偏移面位于叶片中间区域而且远离边界层。
按照上述当地侧滑角和局部坐标系的定义,计算干净构型的机头偏移面处的侧滑角分布,并提取了两种侧滑角传感器布置下传感器的转轴处的侧滑角。图4给出了侧滑角传感器旋转轴处当地侧滑角随来流侧滑角的变化,转轴处的当地侧滑角与来流侧滑角为线性关系,如下式所示。
βT=fβl
(14)
式中:f为Ma数的函数,βl为当地侧滑角,βT为来流侧滑角。
在干净构型上对传感器转轴处当地侧滑角随来流侧滑角变化进行拟合如图4所示,可以看出当地侧滑角(βlocal)与来流侧滑角(βflow)为线性关系,图5给出了文献[17]中通过一种侧滑角传感器的侧滑角修正计算方法得到的在攻角0°、马赫数为0.6时的当地侧滑角(βi)与真实侧滑角(βT)之间的关系曲线,可以看出当地侧滑角与真实侧滑角也为线性关系,因而可以表明本文计算得出的当地侧滑角随来流侧滑角的变化关系是合理的。从图4可以看到,中间位置的侧滑角传感器当地侧滑角与来流侧滑角线性截距为0,构型1和构型2迎风侧(右侧)传感器的斜率相同,而背风侧(左侧)传感器随着离对称面的距离增加而斜率减少。
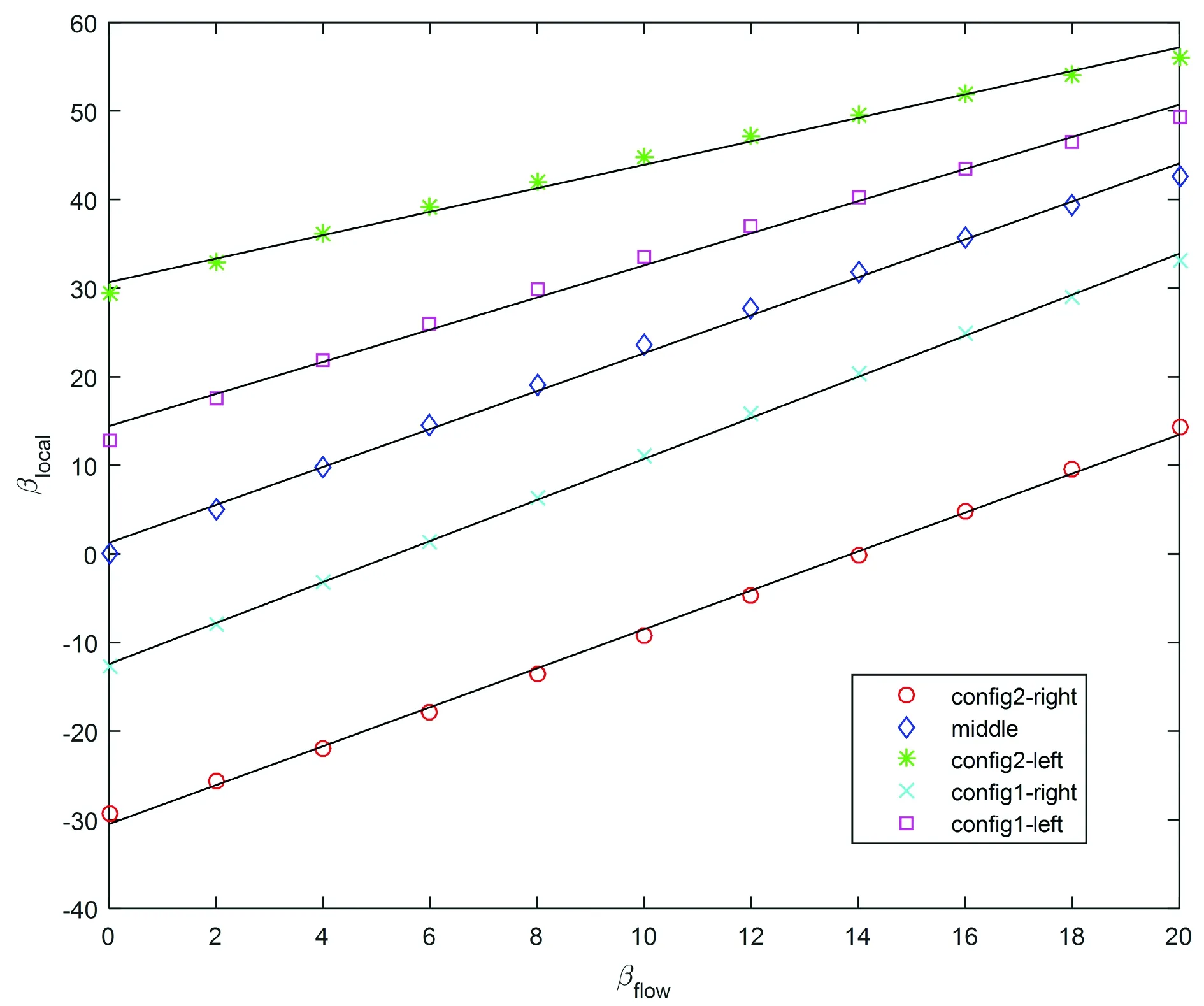
图4 传感器转轴处当地侧滑角随来流侧滑角之间的变化
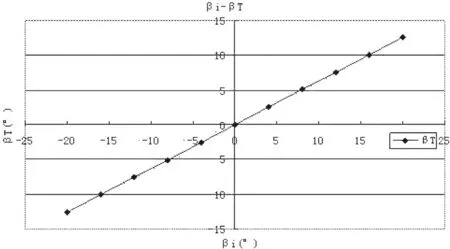
图5 局部侧滑角与真实侧滑角关系曲线(源于文献[17])
对传感器构型,在来流侧滑角为0°和10°时根据转轴处的当地侧滑角分别对每个侧滑角传感器旋转相应角度,然后对侧滑角传感器旋转后的构型进行计算分析。
图6给出了来流攻角AOA = 2°,侧滑角分别为AOS=0°和 10°时三种构型机头偏移面上表面的当地侧滑角分布。在来流侧滑角为0°时,机身对称面两侧的当地侧滑角绝对值对称分布、方向相反,中间侧滑角传感器的偏转角度近似0°,左右两侧侧滑角传感器的偏转角度相同偏转方向相反,构型2外侧传感器偏转角度大于构型1外侧传感器偏转角度,如图6(a)~(c);当来流侧滑角为10°时,来流侧滑角使得机身对称面两侧的当地侧滑角大小分布不再关于对称面对称,其中迎风侧(右侧)传感器的偏转角度小于背风侧(左侧)传感器的偏转角度,如图6(d)~(f)。
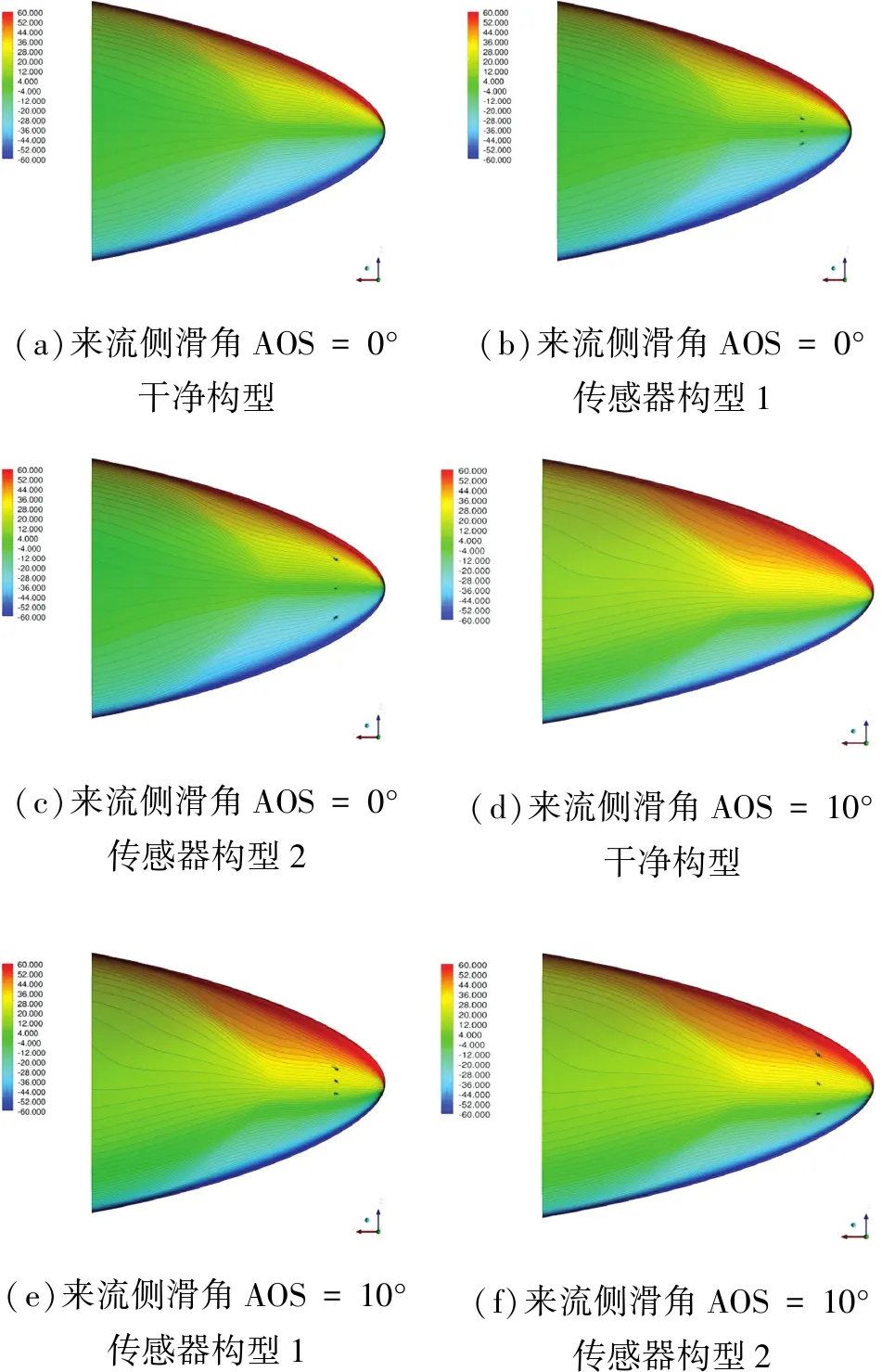
(a)来流侧滑角AOS = 0°干净构型(b)来流侧滑角AOS = 0° 传感器构型1(c)来流侧滑角AOS = 0°传感器构型2(d)来流侧滑角AOS = 10°干净构型(e)来流侧滑角AOS = 10°传感器构型1(f)来流侧滑角AOS = 10°传感器构型2
图6来流攻角AOA=2°时机头偏移面上当地侧滑角分布
从图6中可以看出,在相同的来流侧滑角下,侧滑角传感器对侧滑角的影响仅在传感器附近较小的范围内,偏移面上传感器附近区域外的当地侧滑角分布基本相同。
图7给出了来流攻角AOA = 2°,来流侧滑角AOS分别为0°和10°时机头表面压力系数分布,可见侧滑角传感器对机头表面压力系数的分布影响区域同样也仅在传感器附近,相同来流侧滑角下三种构型机头表面压力系数分布基本相同。
2.4 侧滑角传感器影响区域分析
以上分析了侧滑角传感器对机头偏移面当地侧滑角分布和机头表面压力系数分布的影响,为了进一步明确侧滑角传感器的影响范围需对其进行分析。侧滑角传感器对下游流场的影响主要由脱落涡产生,可通过脱落涡的尾迹区域来判断侧滑角传感器的影响范围,因此对三种构型下机头偏移面上的无量纲涡量进行了分析比较。无量纲涡量定义为:
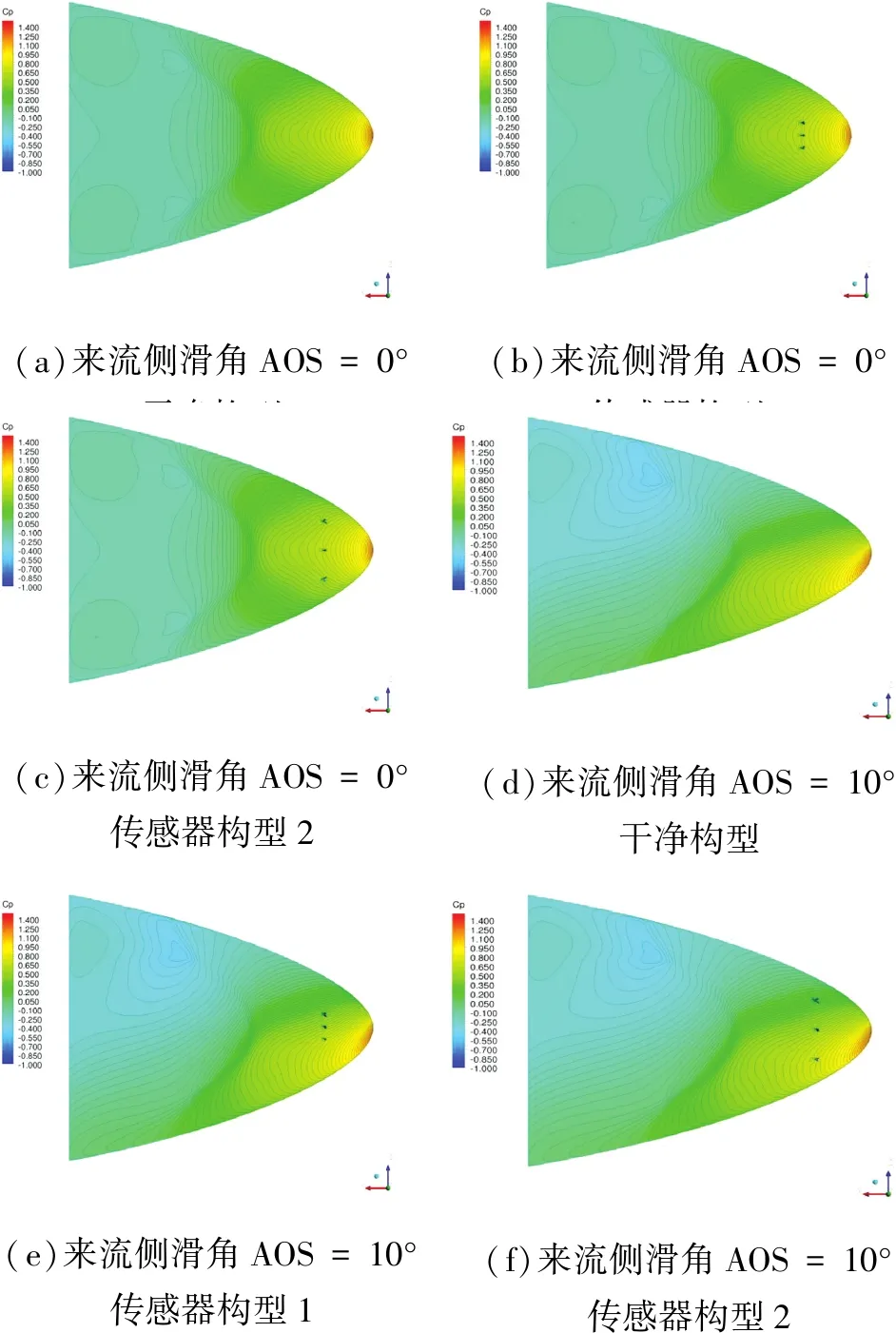
(a)来流侧滑角AOS = 0° 干净构型(b)来流侧滑角AOS = 0° 传感器构型1(c)来流侧滑角AOS = 0° 传感器构型2(d)来流侧滑角AOS = 10° 干净构型(e)来流侧滑角AOS = 10° 传感器构型1(f)来流侧滑角AOS = 10° 传感器构型2
图7来流攻角AOA=2°时机头表面系数分布

(15)
式中:V为速度矢量,Lref为机头长度,Vref为来流速度。
图8和图9分别给出了在来流侧滑角AOS为0°和10°,来流攻角AOA分别为±2°时机头偏移面上的无量纲涡量分布。当来流侧滑角AOS = 0°时,中间传感器的尾迹与来流方向相同,两外侧传感器的尾迹关于机身对称面对称,构型二外侧传感器与对称面的距离大于构型一外侧传感与对称面的距离,构型二外侧传感器的尾迹影响区域到达机头机身的交接处,如图8所示;而当来流侧滑角AOS = 10°时,传感器的尾迹都偏向背风一侧,中间传感器和背风侧(左侧)传感器的尾迹区域到达机头机身区域,如图9所示。
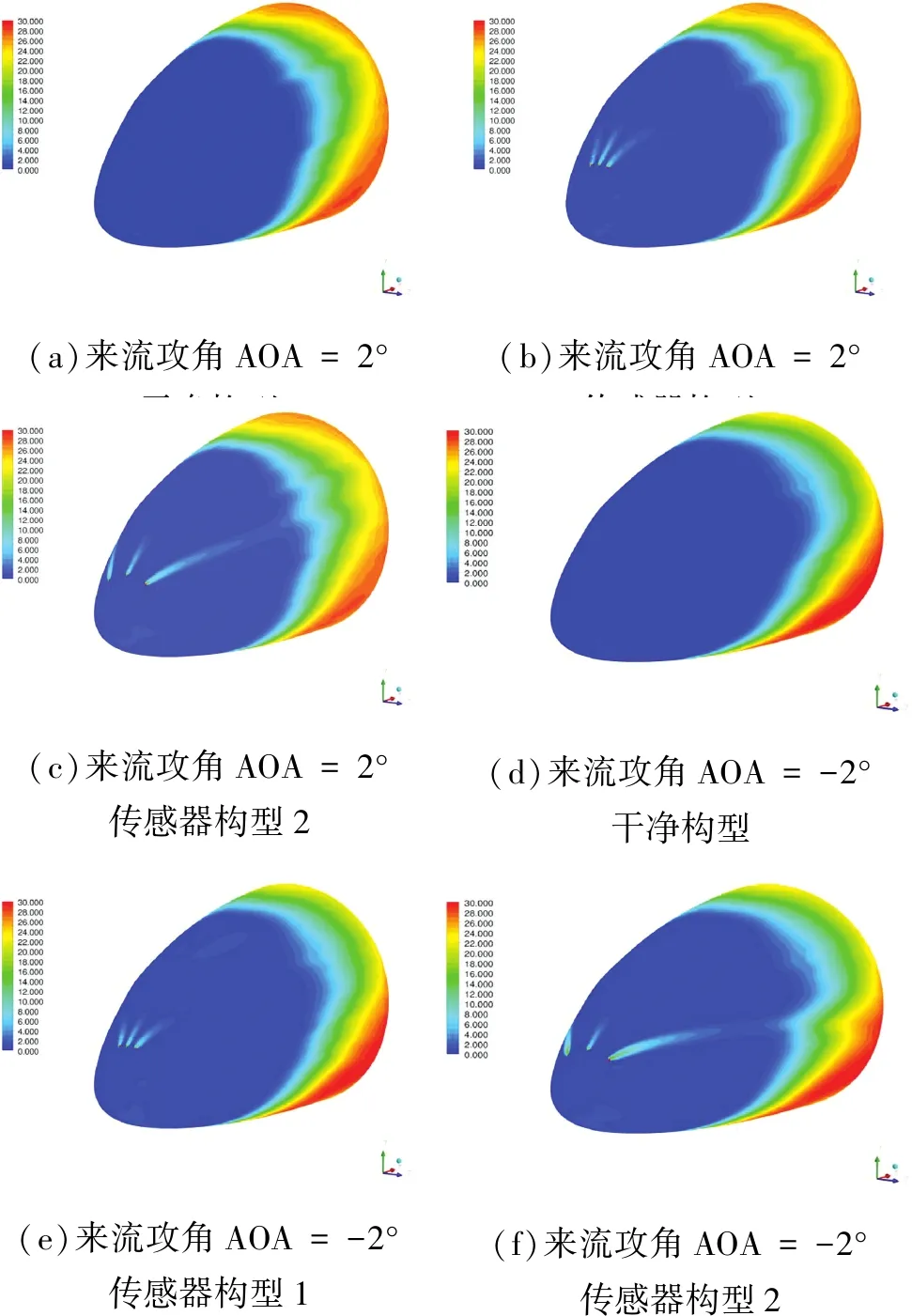
(a)来流攻角AOA = 2° 干净构型(b)来流攻角AOA = 2° 传感器构型1(c)来流攻角AOA = 2° 传感器构型2(d)来流攻角AOA = -2° 干净构型(e)来流攻角AOA = -2° 传感器构型1(f)来流攻角AOA = -2° 传感器构型2
图8来流侧滑角AOS=0°时三种构型机头偏移面无量纲涡量分布
来流攻角AOA 由2°减小到-2°时,侧滑角传感器尾迹涡沿攻角变化方向偏移。从图8中可以看出传感器构型1三个传感器的尾迹由于没有偏向机身侧面,攻角向下偏转引起尾迹涡向下偏转从而使尾迹区域有所减小;而传感器构型2中背风侧的尾迹涡中机身侧面,因此在攻角向下偏转后侧面传感器等尾迹涡向下偏转更加显著。而当来流侧滑角从0°增加到10°时,从图9中可以看出,来流攻角的变化使背风侧传感器尾迹向下偏转效应显著增强。
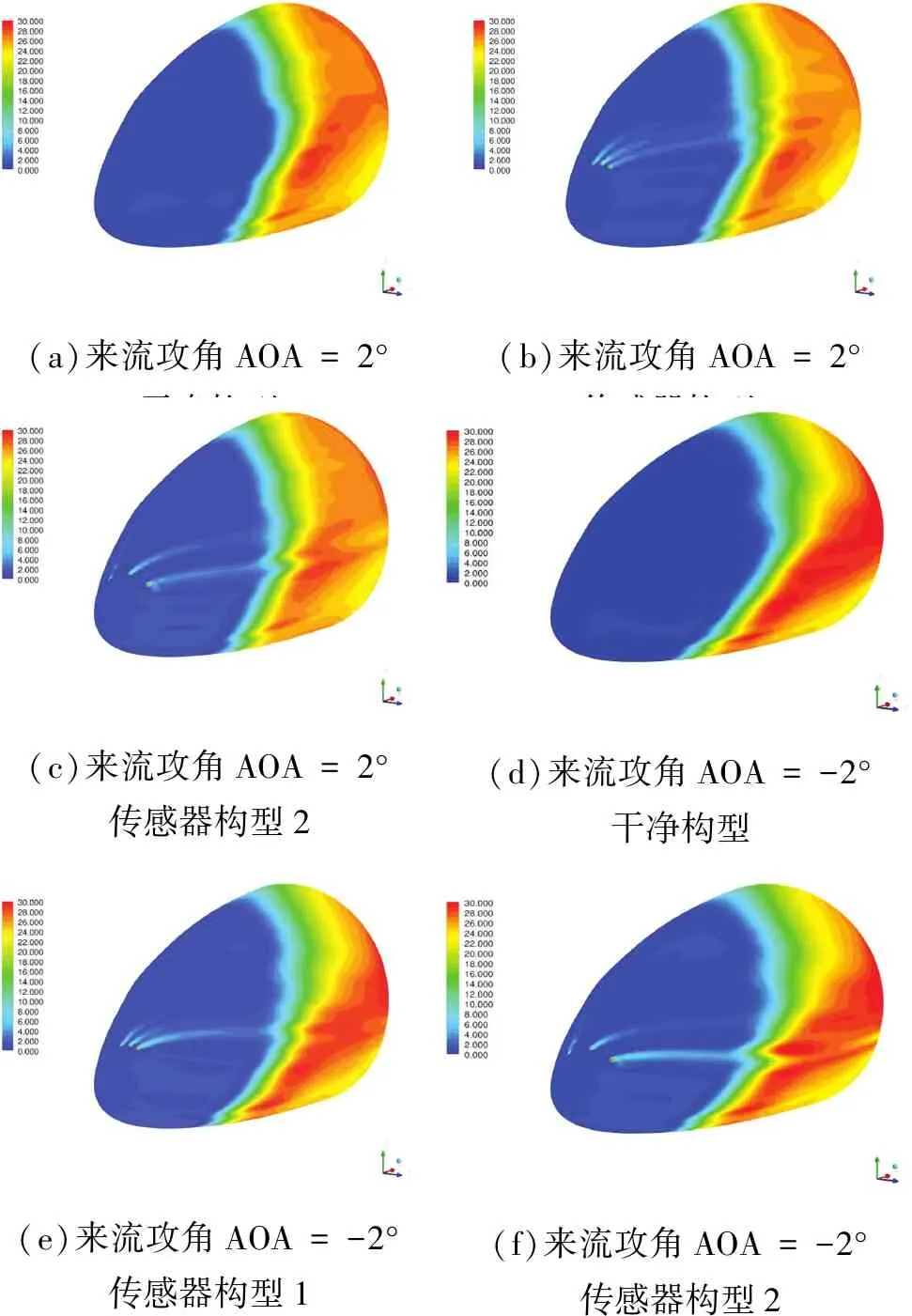
(a)来流攻角AOA = 2°干净构型(b)来流攻角AOA = 2°传感器构型1(c)来流攻角AOA = 2°传感器构型2(d)来流攻角AOA = -2°干净构型(e)来流攻角AOA = -2°传感器构型1(f)来流攻角AOA = -2°传感器构型2
图9来流侧滑角AOS=10°时三种构型机头偏移面无量纲涡量分布
2.5 侧滑角传感器对当地攻角影响分析
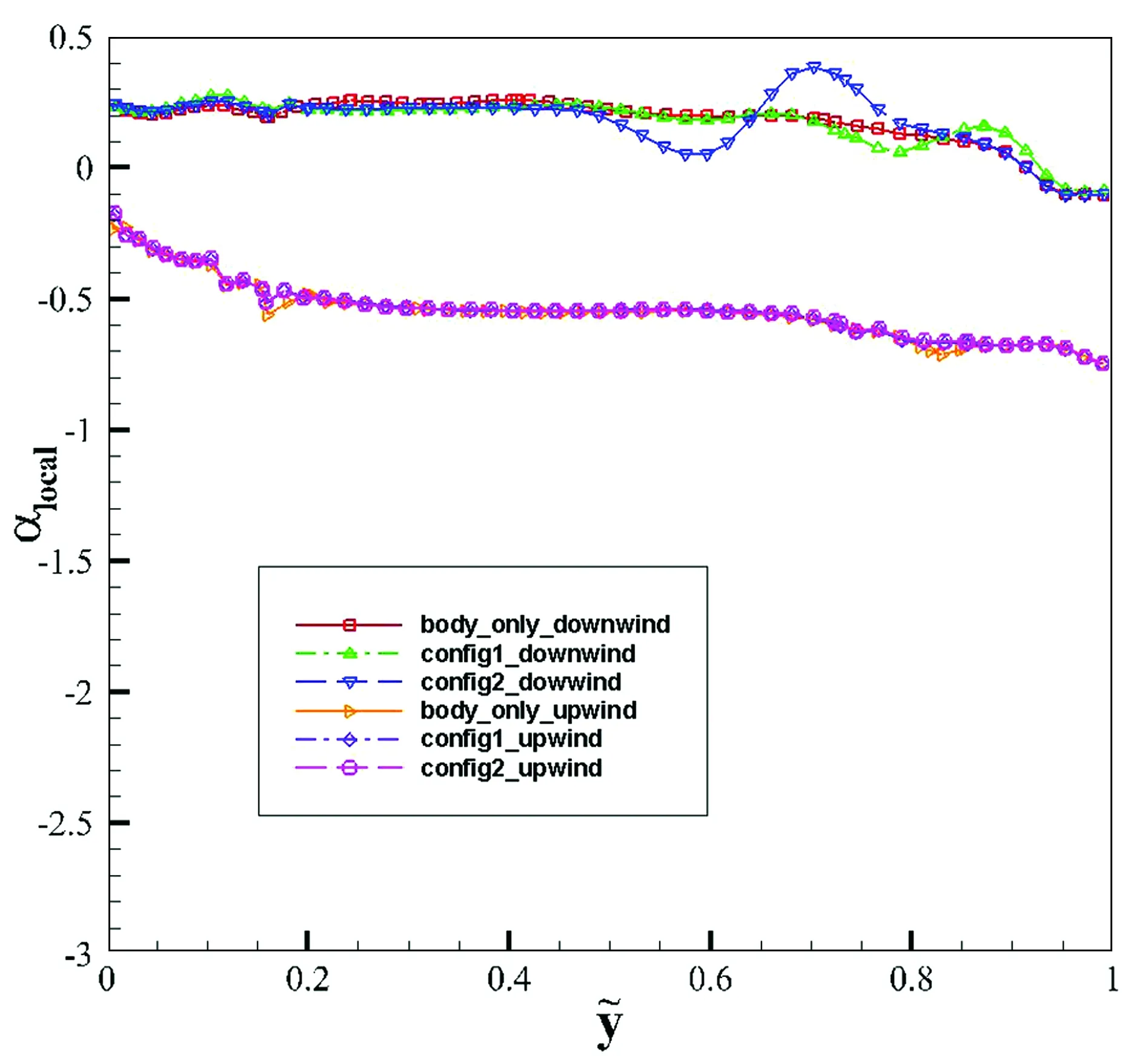
侧滑角传感器的尾迹会影响机头两侧布置的其他传感器,如攻角和大气传感器。上节分析了侧滑角传感器尾迹涡的影响区域,为了进一步分析侧滑角传感器对当地攻角的影响,选取了距机鼻54.8%、62.9%和86.8%机头长度流向位置(x方向),如图10所示。相同流向位置迎风面(右侧)和背风面(左侧)处的当地攻角沿垂直方向(y方向)分布如图11~图13所示,当地攻角的定义见2.2节。
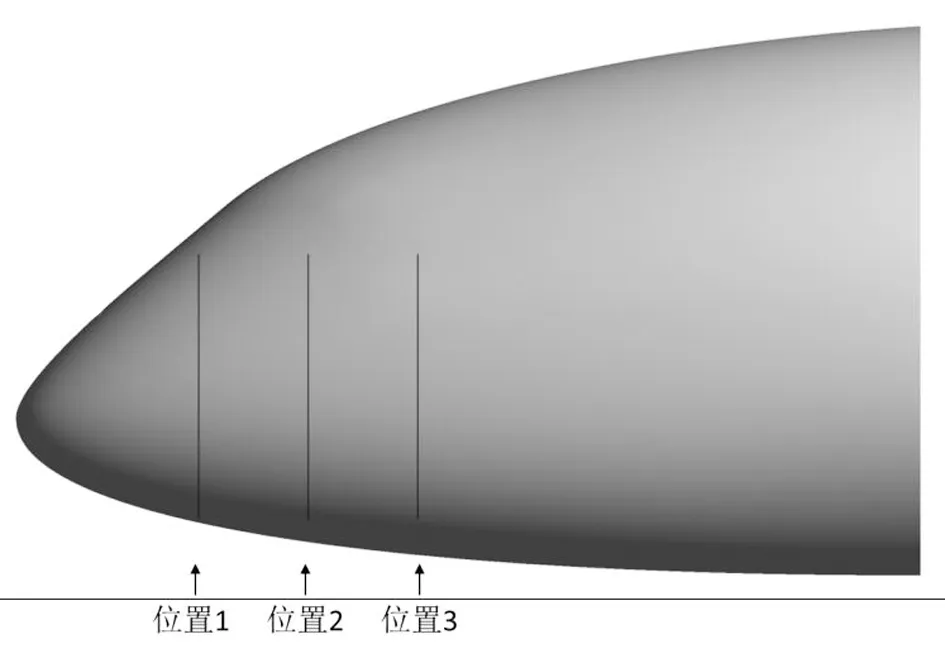
图10 当地攻角分布线的位置示意
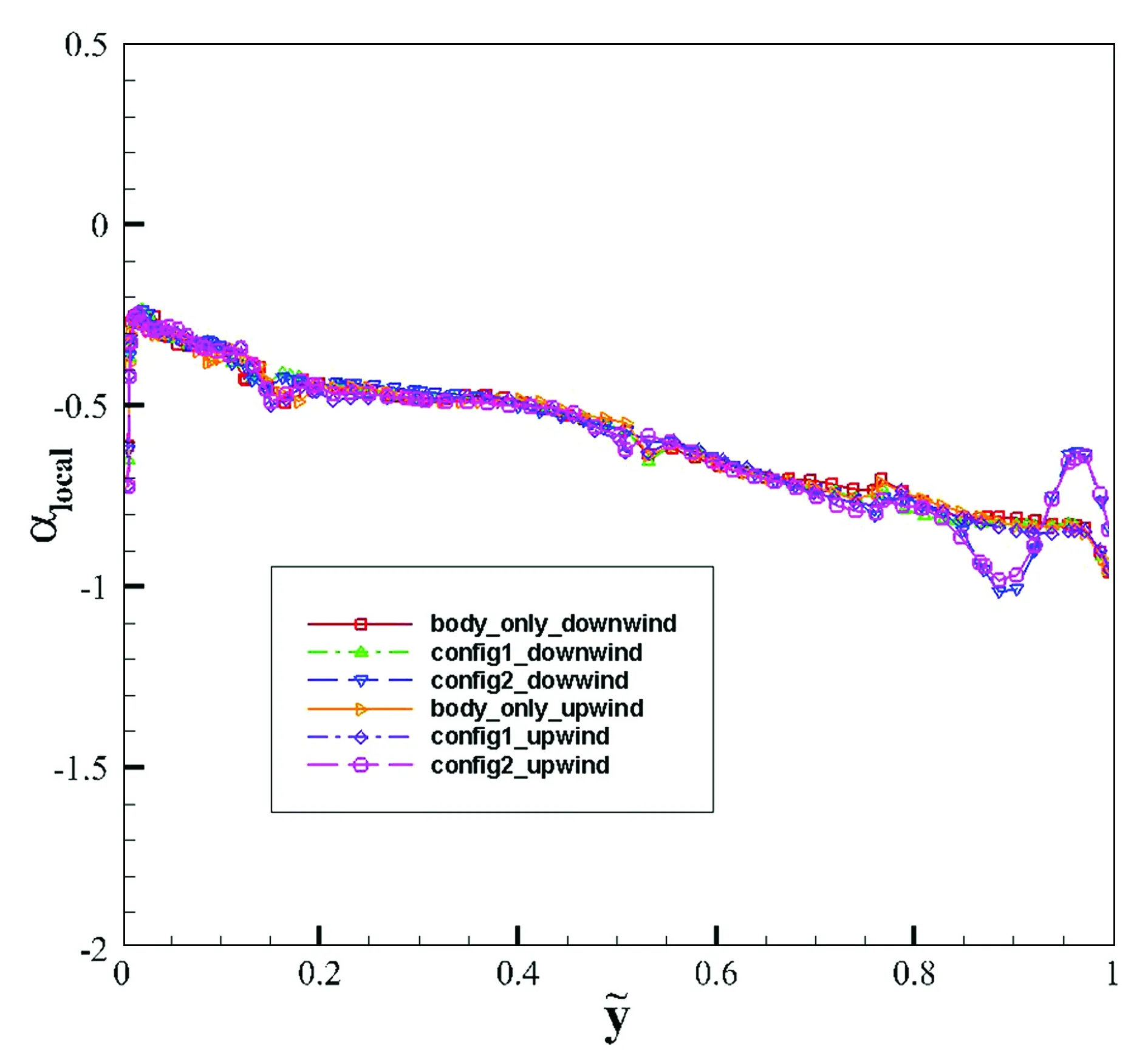
(a)位置1
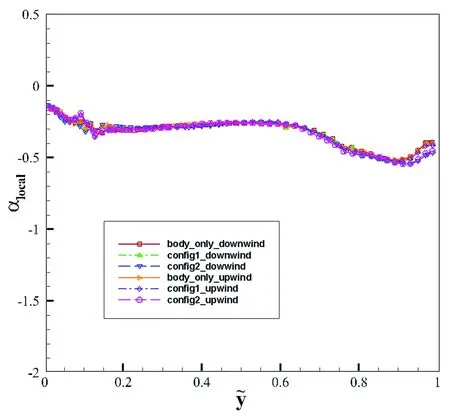
(b)位置2
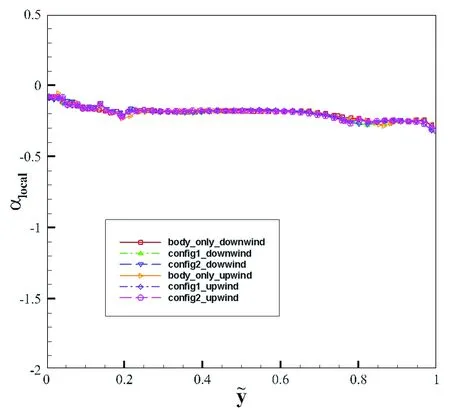
(c)位置3
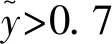
(a)位置1
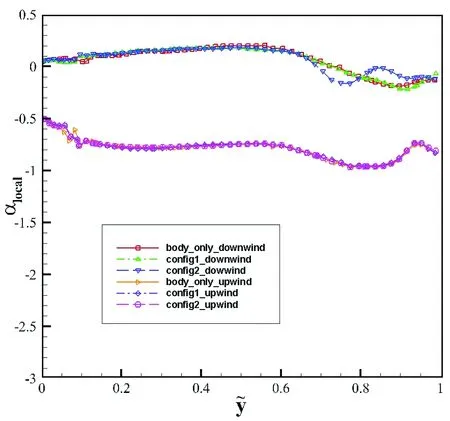
(b)位置2
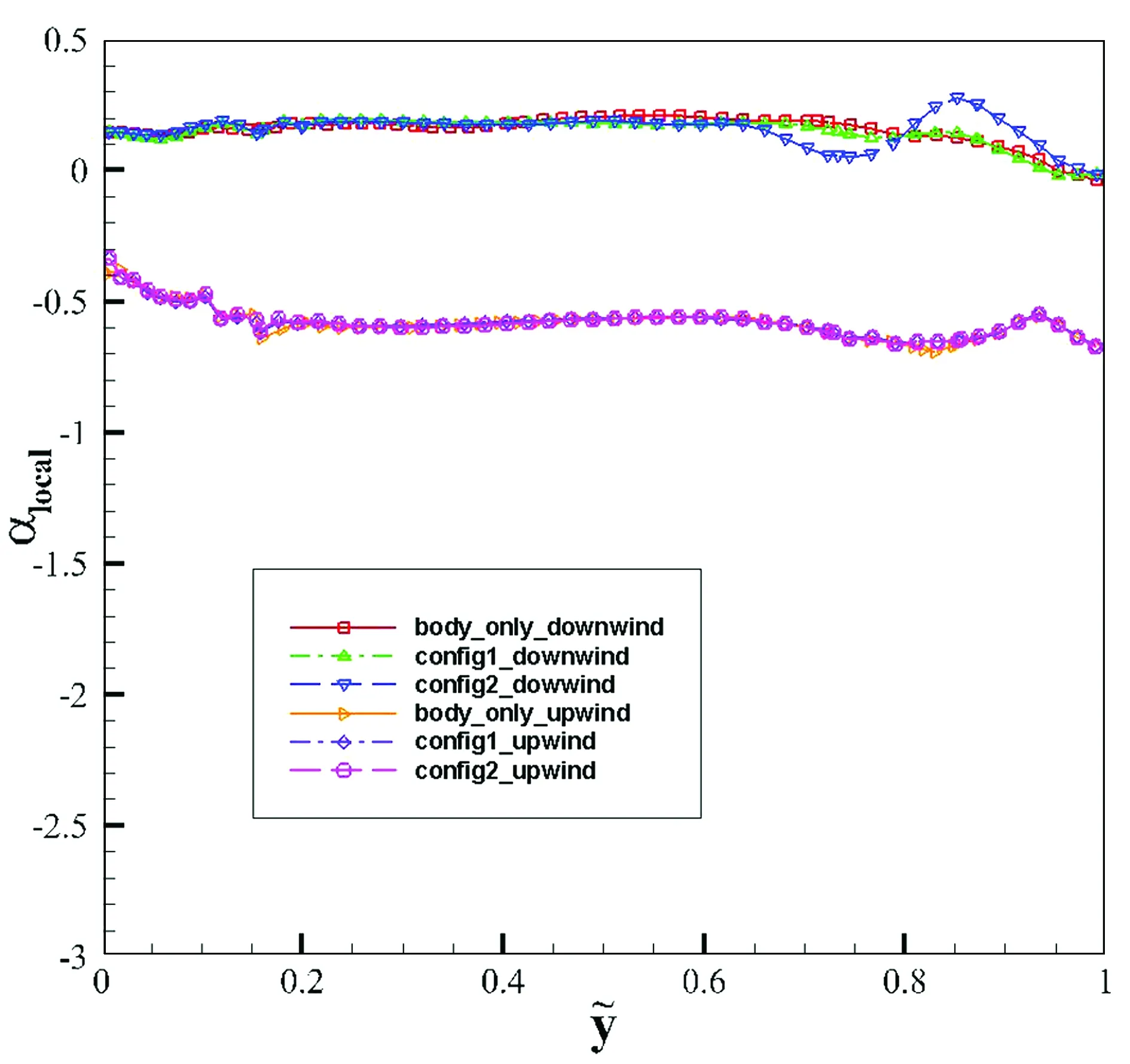
(c)位置3
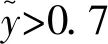
(a)位置1
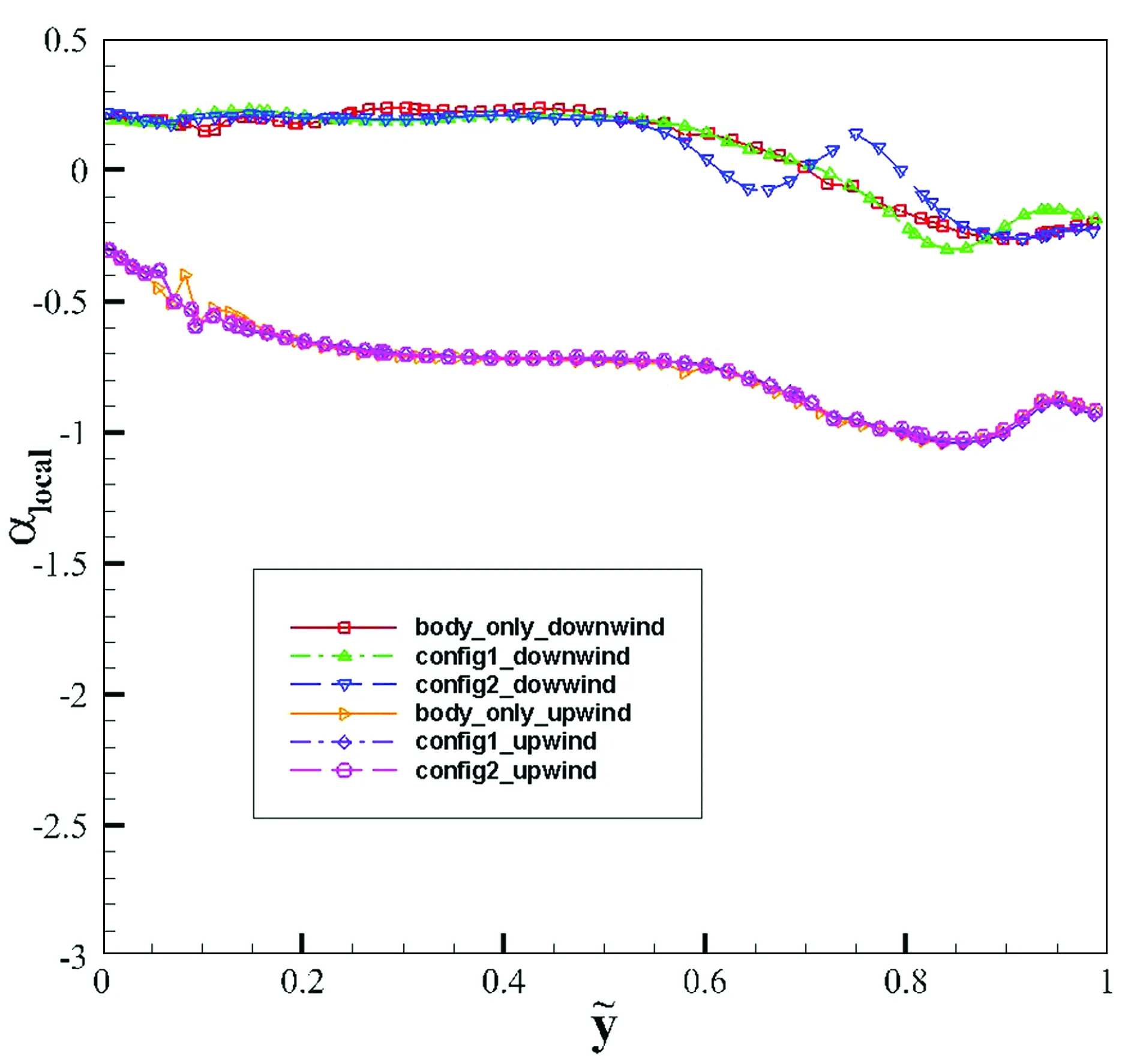
(b)位置2
(c)位置3
3 结论
本文采用基于非结构网格的CFD数值模拟的方法对民用飞机侧滑角传感器的安装定位进行了研究。计算了在来流Ma=0.85、来流攻角为±2°、侧滑角为0°~20°时干净机身构型和在干净机身机头上两处不同位置分布安装的侧滑角传感器构型的流场,分析了机头50 mm偏移面处的当地侧滑角、当地攻角和无量纲涡量分布,得到结论为:
1)侧滑角传感器转轴处当地侧滑角随来流侧滑角成线性变化,其中背风侧侧滑角传感器的变化斜率小于迎风侧的变化斜率,对同侧侧滑角传感器,变化斜率随安装位置与对称面的水平距离增加而减小;
2)两侧侧滑角传感器的尾迹区在来流无侧滑时对称分布、在来流有侧滑时尾迹区偏向侧滑角方向,来流攻角减小时尾迹向下偏转;
3)根据侧滑角尾迹区域和两侧当地攻角分布确定攻角传感器的合理安置位置。
