移动机器人运动过程中的障碍物识别避让
2020-07-04王敬伟


摘要:移动过程中障碍物识别是机器人导航和路径规划的重要基础,也是提升机器人智能化水平的重要体现。现以自行开发的四轮固定式移动机器人作为开发平台,基于图像不变矩和RBF神经网络实现智能移动机器人运动中的障碍物识别避让,并在对障碍物识别之前对其图像进行预处理。设计主旨在于对智能机器人在行进过程中通过摄像设备采集的图像进行预处理,采集障碍物物体边缘,并用神经网络对物体进行识别。对于特殊障碍物使用基于颜色的识别方式,以提高实时性,为机器人的避障以及地图构建等工作打好基础,为场馆移动导览机器人研发提供帮助和支持。
关键词:移动机器人;边缘采集;图像预处理;目标识别;传感器融合
0 引言
第一台工业机器人是美国于1961年推出的,现如今,随着社会的不断发展,机器人技术已涉及很多领域,譬如传感器技术、控制工程、精密机械、动力学、计算机科学技术、人工智能等。机器人也是20世纪以来发展十分迅速的一个重要的高科技领域,它是各个学科前沿技术的交叉应用。机器人的出现与发展使得传统工业生产的方式发生了翻天覆地的变化,让我们的生产方式从手工作业发展到机械化、自动化,直到现在的智能化。
如今,随着我们生活水平的提高和科学技术的快速发展,机器人的用处已经越来越广泛,它可以承担各种工作。机器人以前都是在工厂和车间里工作的,现在已经开始走向室外、大海甚至是太空。具有人工智能的自主式机器人正在向制造业以外的方向扩展,这些非制造业包括了航空、深海探测、军事侦察和打击、建筑、救护医疗、家庭服务、农业生产、自动化办公和自然灾害救援等,如飞行机器人、海难救援机器人、化肥和农药喷撒空中机器人、护理机器人等。
进入21世纪以来,我国迎来了老龄化时代,劳动力短缺已经成了很多行业所不得不面对的难题,為了解决这样的难题,很多行业和企业已经开始大规模采用机器人替代人的劳动。可以预见,机器人也将在很多服务行业取代人工。因此,开发面向大众服务的各类移动智能机器人已经成为了人工智能时代大家普遍关注的又一个新兴技术与产业。
本文所研究的是障碍物识别技术,准确的障碍物识别不仅是运动机器人实现行进过程中避让障碍物的前提和基础,也是运动机器人精确定位与建图的必要条件及路径规划的重要保障,因此实时、高性能的障碍物识别技术是智能移动机器人的一项基础性研究工作,本文正是要完成这一基础性工作。本研究侧重于在室内环境下,基于单目摄像头与超声波传感器相融合的智能移动机器人障碍物识别技术。
1 移动机器人设计简述
作为一个完整的移动机器人系统,一般需具备以下几个部分:机械系统、行走驱动系统、传感系统、控制系统以及通信系统。图1给出了本研究所设计的智能移动机器人功能模块。
作为一个全自主的智能移动机器人,它应该具有感知、运动、导航和通信四大模块的功能,并应具有低功耗、低成本、高性能和高智慧的特点。
我们在搭建本平台的时候主要考虑如下:
行走机构系统:根据实际需要,行走机构的结构形式并不是完全单一的。在实际应用中,移动机器人会被要求在各种各样的场地上活动,因此其行走机构的结构形式有很多种。当前,对腿足式行走机构、履带式行走机构和特殊行走机构的研究比较多,但很大一部分研究还处在实验室验证的阶段。轮式行走机构由于控制起来比较方便,稳定性也好,并且其行进方式是滚动前进,滚动摩擦所消耗的能源比其他行进方式要少很多,所以本平台选用四轮式行走机构模式。
实时性是移动机器人要考虑的主要因素,其主要着眼于处理器和操作系统的选择和配置。本平台选择采用S3C6410+STM32F103VCT6组成移动机器人的双处理器。将基于ARM11核的S3C6410微处理器作为移动机器人的主控制器,主要负责路径图像的采集、无线信号的通信、采集图像的处理、决策选择等功能的实现。STM32系统作为辅助处理器,主要负责移动机器人的移动控制、碰撞传感器检测、超声检测、红外测距等。图2给出的是移动机器人的外观以及部分主要传感器的安装位置。
2 障碍物图像的识别
2.1 图像预处理
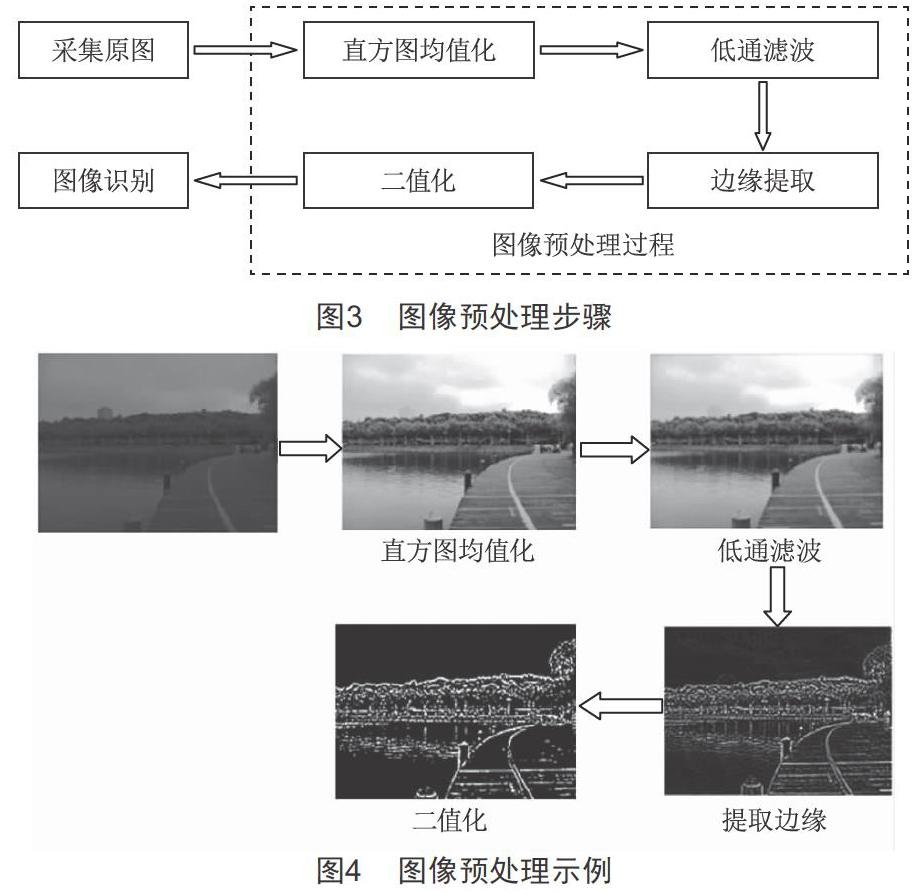
摄像头模块所采集到的图像由于种种客观条件限制,或多或少都会影响到所拍摄到的图像的质量,从而造成图像存在着各类噪声、突变的条纹,画面信息丢失等现象也时有发生,这些现象会对图像的识别工作造成不同程度的影响。因此,在进行物体边缘提取等工作前需先对采集到的图片进行去噪等处理,以便最大程度地去除各类因素的干扰。
在去除噪声等干扰后,所得到的图像并不能立即被识别,为提高处理效率以及简化程序设计,现在还需要对图像进行二值化处理。
图3展示了图像预处理的步骤,图4则是图像预处理示例。
图像的边缘是其能够被识别的最基本的特征,图像边缘是指图像周围像素的灰度值发生跳跃性变化的像素集合,即灰度值的导数较大的地方,它体现了图像中的显著变化,反映了图像本身的形状特征。本文对基于边缘增强的边缘检测技术进行了分析,最后选择了基于Prewwit算子的Canny算法。
2.2 基于图像识别与超声波结合的障碍物识别
实时视觉技术主要包括视觉信息的实时采集、信息处理、主要信息的提取跟识别。视觉信息的处理能力、处理速度、处理的可靠性和准确性是影响移动机器人智能系统性能的决定性因素。
本设计通过超声波传感器检测障碍物的位置与距离,并将超声波检测出的障碍物位置与图像识别的结果相结合,使用模糊识别的方式来判定物体的类型和方位,为进一步避障或者对障碍物进行操作打好基础。图5所示为本文图像识别算法流程图。
3 实验结果与分析
为了验证所采用的图像处理与障碍物识别算法,我们在室内各种模拟环境中做了大量的测试和实验。在室内环境特别是地面环境中,路径上物体的颜色一般具有比较明显的特征,常有的障碍物包括人类、桌椅、橱柜、地板、门框、门扇、墙壁等,色彩主要集中于白色、黑色及其他非纯色。
尽管有些环境下由于具体需要可以有比较多的纯色,比如在有些居家环境中家庭主人比较喜好红色,家中就会有大量红色物体,但通常情况下不会同时存在多种纯色。因此,可以通过程序设置,使机器人挑选室内较少的颜色作为特殊障碍物的标定色。
而在某些类型的室内环境中,如实验室或工厂等场所,其桌椅、机器等一般都采用灰暗色调,如黑色、白色、灰色、灰绿色等,这个时候就可以选取对比度较大的颜色作为识别色。比如可采用在设备上加上红色标签的方法,以便智能机器人在移动时进行识别并及时避让。
图6、图7所示分别展示了机器人在遇到不同障碍物后选择的不同运行路径。
测试中采取的实验策略如下:如果识别到特殊标记障碍物,则立即停止运行;如果识别到是目标障碍物a,则向左转弯绕开障碍物;如果识别到是目标障碍物b,则向右转弯绕开障碍物。特殊标记定义为红色标记,控制系统可对目标障碍物进行学习,即水瓶为特殊障碍物,易拉罐为目标障碍物b。
4 结语
本项研究在自行搭建的一个移动机器人平台上实现了对采集到的物体图像进行处理和分析,通过物体的外形与特定的颜色进行对比和识别;同时实现了视觉传感器和超声波传感器的融合处理,能够对简单背景下的障碍物进行有效和准确识别,并且在有特殊标定障礙物的情况下可以优先处理特殊障碍物,能够在一定程度上满足障碍物多样化识别的需求,可为场馆移动导览机器人研发提供极大的帮助和支持。
[参考文献]
[1] 王炎,周大威.移动式服务机器人的发展现状及我们的研究[J].电气传动,2000,30(4):3-7.
[2] 李开生,张慧慧,费仁元,等.国外服务机器人的发展动态和前景[J].制造业自动化,2000,22(6):1-4.
[3] 丁明跃,常金玲,彭嘉雄.不变矩算法研究[J].数据采集与处理,1992,7(1):1-9.
[4] CHEN C C.Improved moment invariants for shape discri-mination[J].Pattern Recognition,1993,26(5):683-686.
[5] 刘敦浩,张彦铎,李迅,等.动态环境下自适应阈值分割方法[J].计算机应用,2016,36(S2):152-156.
[6] 张建平,韩亚军.基于视觉和嵌入式系统的机器人路径规划[J].智能机器人,2018(2):57-58.
[7] 张毅,罗元,郑太雄,等.移动机器人技术及其应用[M].北京:电子工业出版社,2007.
收稿日期:2020-03-02
作者简介:王敬伟(1976—),男,湖北红安人,工程师,研究方向:多媒体交互互动。
