移动机器人高精度定位技术研究
2015-04-27杨楠
杨楠
摘 要:移动机器人在人们日常生活中扮演着越来越重要的角色,高精度定位技术作为移动机器人关键技术之一而得到广泛关注与研究。研究分析了目前已有的定位技术,并且提出一种改进的基于图像信息的移动机器人自主定位技术,从图像中获取特征点,然后采用改进的匹配算法匹配连续帧之间的特征点,在已知相机参数的条件下计算出相机投影矩阵,解算出移动机器人姿态矩阵。基于图像信息的定位算法,克服了其他定位方法信号漂移、定位精度差的缺点,并且该定位装置具有价格低、易于安装操作的特点。
关键词:移动机器人;高精度定位;视觉定位;特征匹配;相机投影矩阵
中图分类号:TP391.4 文献标识码:A 文章编号:2095-1302(2015)04-00-02
0 引 言
目前被广泛使用的GPS定位技术,存在定位精度低、信号盲区、输出频率低等缺陷[1],因此新的定位技术[2]在不断被探索。近几年来,由于图像处理技术快速发展,运用图像方法辅助定位技术成为研究热点[3,5-8],SHI Hang提出一种有效的景象匹配辅助GPS/SINS(GPS/SINS/SM)组合导航算法[3],主要目的在于修正GPS、SINS 以及GPS/ SINS 组合导航系统的估计误差,提高系统的可靠性。美国NAVSYS公司开发了一种CPS/惯性/图像组合系统GI-Eye,研发出一种视频校正技术并应用在CPS /惯性/图像传感器中,使其在CPS信息连续丢失的情形下也可维持高精度的位置与姿态信息[4]。由于图像匹配定位的精度很高,Sim利用这种精确的位置信息消除惯性导航系统长时间工作的累计误差,以便提高惯性导航系统的定位精度[5]。那么,对于无信号情况下的机器人自主定位问题,也可以根据基于图像匹配[6]获取的机器人轨迹与初始位置信息来解决。Lowe提出的SIFT算法在视点变化、仿射变换和噪声下具有良好的匹配性能[7];Ke提出PCA-SIFT算法将描述子从128维降到36维,提高了特征向量的匹配速度[8];Bay提出了SURF算法[9],主要根据Fast-Hessian矩阵的行列式检测特征点,利用Haar小波的局部响应来描述特征。本文采用一种SURF匹配算法自适应切换的移动机器人运行轨迹提取方法,可以实现无信号情况下的移动机器人定位问题,并且其精度满足机器人行为安全分析要求。
1 算法总体设计
机器人运行轨迹提取是利用高速率相机实时提取当前路面图像,根据图像匹配算法计算当前图像与前一帧图像的变化距离及变化角度,计算相机运动姿态反应机器人运动状态。利用路面图像的变化反映机器人行驶变化,然后根据图像坐标系和机器人坐标系之间的关系推算出其实际运行轨迹。
此过程中,关键在于路面图像的精确匹配。路面图像纹理丰富、特征点多,所以本文首选采取了SURF特征匹配算法[9]。利用SURF算法检测当前图像和前一帧图像的特征点,采用特征点特征向量的欧氏距离来作为两幅图像特征点的相似性判断度量。找出当前图像与前一帧图像中欧氏距离最近的前两个特征点,在这两个特征点中,如果最近的距离除以次近的距离少于某个比例阈值,则接受这一对匹配点。因此选择合适的阈值极其重要,本文选取的阈值为0.6,其在保证匹配稳定性的前提下,提高匹配的准确率,减少错误匹配点数。
2 视觉定位技术
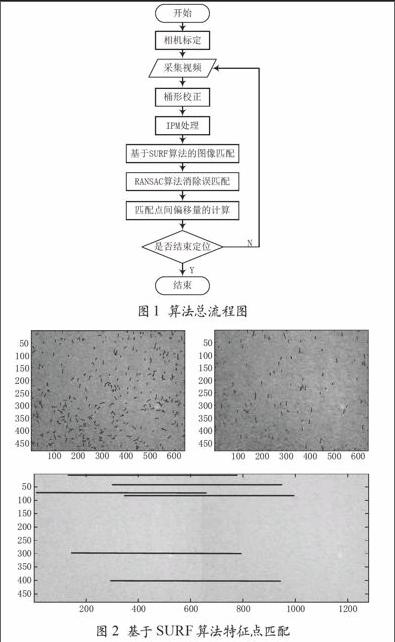
本文采用如图1所示的算法对机器人姿态进行解算。为了得到高精度的定位结果,需要预先知道相机参数,因此首先对相机进行标定。本实验中所用相机为广角镜头,故对图像进行桶形矫正处理,IPM变换的作用是将图像变换成俯视图便于图像处理。针对双目相机图像的匹配,本文拟采用SURF算法。
SURF算法是一种基于快速鲁棒特征的匹配算法,是目前效率较高的图像局部特征提取及描述算法,主要应用于图像配准与拼接方面。该算法主要包括特征点检测、特征点描述以及特征点匹配3个部分。
2.1 特征点检测
2.2 特征点描述
在以特征点为圆心,半径为6σ(σ为尺度)的圆内,计算Harr小波响应值dx,dy,对之进行高斯加权,记为Wdx,Wdy。然后对加权后的响应值进行直方图统计,将一个圆的360°分成72组(每组5°)的60°大小扇形区域,分别对每个区域内的哈尔小波响应值相加计算得到一个新的矢量,最后选择最长的矢量方向作为该特征点的主方向。
确定主方向后,以特征点为中心,选取中心点邻域范围内20σ*20σ大小的区域,然后将区域的主方向旋转到特征点的主方向。将此区域划分为4*4共16个子区域。对每个子区域,计算每个像素点经过加权的Harr小波在X方向和Y方向的响应值dx,dy,然后建立一个四维的特征向量如下:
对于前一帧图像上的特征点,计算它到后一帧图像上所有特征点的绝对值距离,得到一个距离集合。通过对距离集合进行比较运算得到最小绝对值距离和次最小绝对值距离。设定一个阈值T,当最小绝对值距离和次最小绝对值距离的比值小于T时,认为具有最小绝对值距离的特征点是匹配的,否则没有点与该特征点相匹配。阈值设定越小,配准点对越少,但配准更稳定。
3 实验结果及总结
采用机器人上安装的相机采集路面图像,对图像处理从而得到运行轨迹。拍摄路面长度为6 m,可以转化成279帧图像,图像大小为640*480,采用SURF算法对图像进行特征点检测和特征点匹配。图2为该视频中采用SURF算法匹配结果。其中,前两帧图像分别为前一帧和当前帧图像,然后是两帧图像的匹配结果。
计算每幅图像所有正确匹配点的偏移量和角度,然后使用其均值绘制轨迹。运行距离单位以像素点计,图像移动长度与机器人实际运行长度的转换比例依赖于实际拍摄时相机的位置。在本文实验坏境下,可粗略获得换算比例为1 m:580pixels,计算轨迹误差,明显可知误差范围<1 m,由于人为拍摄,存在轻微抖动,但不影响整体运行趋势。
本文提出了一种基于SURF点匹配的机器人移动轨迹提取方法。该方法首先通过SURF算法与基于SURF获取匹配点。计算匹配点之间的偏移量和角度,采用分类法消除错误的匹配点,最后根据正确匹配点之间的偏移量和角度,绘制运行轨迹。该方法保证了机器人轨迹提取的连续性,精确度满足机器人行为安全分析的误差要求。
参考文献
[1] Yuan Xin, Yu Jixiang, Chen Zhe. Navigation System[M]. Beijing: Publishing House of Aeronautics Industry,1993.
[2] Gezici S. A survey on wireless position estimation[J]. Wireless Personal Communications, 2008, 44(3): 263-282.
[3] SHI H, YAN L, LIU B, et al. GPS/SINS integrated navigation algorithm aided by scene matching[J]. Journal of Tsinghua University (Science and Technology), 2008,48(7): 1182-1185,1189.
[4] Conte G, Doherty P. An integrated UAV navigation system based on aerial image matching[C]//Aerospace Conference, 2008 IEEE. IEEE, 2008: 1-10.
[5] Sim D G, Park R H, Kim R C, et al. Integrated position estimation using aerial image sequences[J]. Pattern Analysis and Machine Intelligence, IEEE Transactions on, 2002, 24(1): 1-18.
[6] 赵玲.基于视觉和超声传感器融合的移动机器人导航系统研究[D].武汉:武汉理工大学,2007.
[7] Lowe D G. Distinctive image features from scale-invariant keypoints[J]. International journal of computer vision, 2004, 60(2): 91-110.
[8] Ke Y, Sukthankar R. PCA-SIFT: A more distinctive representation for local image descriptors[C]//Computer Vision and Pattern Recognition, 2004. CVPR 2004. Proceedings of the 2004 IEEE Computer Society Conference on. IEEE, 2004(2):506-513.
[9] Bay H, Tuytelaars T, Van Gool L. Surf: Speeded up robust features[C]. Computer Vision–ECCV 2006, 2006: 404-417.
