基于颜色分选的建筑废料分拣系统设计
2020-07-03尹恒军代作晓
尹恒军 杨 宁 代作晓 张 鹏
( 1、上海电力大学,上海200090 2、中科院上海技术物理研究所太仓中心,江苏 苏州215400)
1 概述
伴随当前我国科学技术迅猛发展, 我国已经逐渐进入到了数字信息化智能时代,在社会生活中的各个领域都得到了广泛的应用,使各行业技术都得到了提升。 在建筑领域,建筑废料随着生活质量的提升,数量和种类也逐渐增加。 尤其是在拆旧建新的过程中,伴随着大量的建筑废料产生。 对建筑废料的有效分拣势在必行,不仅要提升废料分拣效率,更要提升分拣的准确率。
传统的人工分拣人工或传感器识别已经无法满足当今建筑废料分拣数量,而且由于技术落后,其处理的方式也大多为直接填埋或者当作路基使用,这样不仅占用大量的土地资源,消耗运筹建设经费,还污染环境。
因此, 本文通过对建筑废料进行成像后, 对其像素RGB 数值进行有效区分, 并且使用双线阵彩色CCD 进行成像,最后通过机械臂完成建筑废料的分拣。 整个过程依据颜色识别的建筑废料分选系统,主要完成对建筑废料中青砖、红砖、混凝土块等进行分选。 这种通过工业相机识别进行有效分拣的系统,大大提高了建筑废物分拣速度和效率,提升了分拣的准确性,节省了时间成本、人工成本以及空间存储成本,同时也减轻了对环境的污染,可以进行大范围试用和推广。
2 建筑废料分类
随着我国城镇化加剧,城镇基础建设不断加大,我国产生的垃圾废物也与日激增,每年生产的建筑垃圾大概有15-20 亿吨。大量的建筑垃圾不仅污染周围环境,也会造成一定的资源损失。
建筑废料的分类是根据《 城市建筑垃圾和工程渣土管理规定(修订稿)》所分类的,其中建筑废料指的是建设、施工单位对各种建筑物、构筑物在建设、拆迁、维修以及居民装饰、装修时所产生的余泥、余渣及其他垃圾。 如果根据废料来源进行分类,建筑废料可以分成土地挖掘、道路挖掘、建筑物拆除、建筑施工以及建材废料五类,而这五类主要由渣土、碎石块、泥沙浆、碎石块、废旧塑料、金属废料以及竹木废料等形成。
根据建筑废料的分类,可以依据不同垃圾废料的用处,对建筑废料进行二次回收利用,提高废旧资源的利用率。 目前,根据颜色差异对建筑废料进行重新划分、再利用的技术,在欧美国家已经较为成熟, 在中国还处于探索阶段, 垃圾废料再利用率较低。
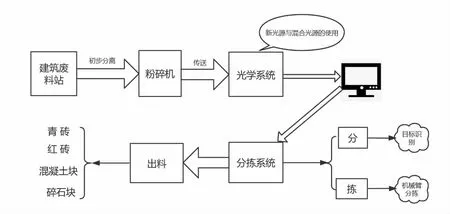
图1 建筑废料分选工作流程图
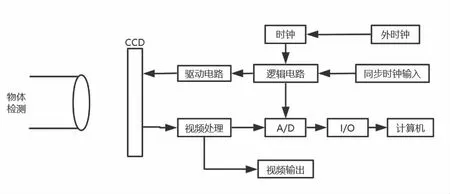
图2 光学系统的结构
3 颜色分选原理
建筑废料的回收利用一般情况下,要对烧纸的砖、石进行一定程度的分离, 以生产二次利用的砖石与混凝土原料。 传统技术中的分拣设备早已经无法满足现有需要,烧治的砖、石块也无法做到准确分离,影响再利用质量。 针对现有分拣难题,利用现代技术手段,可以通过图片颜色的识别来进行建筑废物的分拣,以达到废旧物再利用的目的。 颜色分选主要是利用建筑垃圾的显示颜色差异,在基于物体表面差异的基础之上,采用分选系统来识别不同颜色进行划分。
本篇文章所述的建筑废料分选系统的基本工作原理是通过双线阵CCD 摄像机摄像,获取建筑废料的在传送带上一定速度下的图像, 然后将获取的图像通过高速图像采集卡转换成数字量,接着利用计算机将采集到的数据进行处理,通过算法自动识别图像中建筑废料的RGB 的值,之后进行建筑废料的匹配和建筑废料种类的识别,将获取到的建筑废料的位置信息输入到运动控制芯片中,由动控制芯片发送控制信息来指挥机械臂的移动和实现对建筑废料的抓取。 最后将抓取到的建筑废料放入到对应的存放点,分拣工作完成。
建筑废料的颜色识别分选过程是, 在进料斗中的建筑废料进入破碎机之前,先对建筑废料进行简单处理,主要是将混凝土与钢筋进行初步的分离。接着将含有砖块、混凝土块、碎石块、泥沙浆等建筑废料送到破碎机处理,需要将建筑废料破碎成直径大约为10cm 的块状物体, 利用机器传送带将这些块状废料通过光箱内的透明背景区。 废料在接收到光源的照射后,采用两套彩色线阵CCD 拍摄图片,并将采集的数据传送给计算机处理,通过计算机将控制参数输送给控制运动的芯片,由控制运动芯片控制机械臂,把砖块主要是红砖、青砖、混凝土块、碎石块、泥沙浆等建筑废料进行分离,最后将分离后的废料通过四个传送带送入四个不同的料箱中,从而分选完成。 工作流程图如图1 所示。
4 建筑废料分拣系统设计
建筑废料分拣系统的结构体系主要是由四个模块组成,这四个模块呈线型分布,是“ 一条龙”控制模式,主要包括供料系统、光学系统、运动控制系统和分选系统。
4.1 供料系统
供料系统的设计主要用于对建筑废料的整理, 一方面使建筑废料在传送带上能够做到不重叠不遮挡,另一方面使建筑废料保持稳定的传动速和相对稳定的个体姿态,从而保证建筑废料通过光学系统的观察区能够逐个被识别检测,该系统主要由供料站、破碎机、振动喂料器等组成。
在对建筑废料分拣前,需要对建筑废料进行初步分离,初步分离主要是针对混凝土和钢筋,当初步分离完成后,将建筑废料通过破碎机进行处理,考虑到系统实验性的要求,后面分选系统采用的是型号为VS-6677GM-B 的机械臂, 因此将建筑废料破碎成直径大约为10cm 的块状物体, 接着通过震动喂料器将经过破碎处理的废料移到传送带,利用传送带将废料重送至光学检测区域进行识别检测。
最终,供料系统需要完成下列几个任务:
( 1)破碎,保证建筑废料达到合适的大小,既能方便识别也能方便分拣;
( 2)排队,保证建筑废料在传送带上不重叠不遮挡,有顺序的进入到光学系统;
( 3)匀速,保证建筑废料到达后面的系统保持一个稳定的速度, 使其到达监测点和分选点的时候能够被准确的识别和分选。
4.2 光学系统
光学系统的作用是用来对建筑废料进行观察, 用来获取传送带上建筑废料的颜色信息和位置信息。 本系统采用两个彩色线阵CCD 工业相机、光源、背景板、以及清洁器组成。
线阵CCD 拥有着比面阵CCD 结构简单,成本较低,灵敏度高,动态范围广等优势。 本系统中采用的颜色线阵CCD 工业相机是采用的是分光棱镜的方法, 在棱镜后对应三片CCD 传感器,分别来对应光线的三原色:红、绿、蓝,通过颜色线阵CCD 相机将采集的图像结合计算机完成建筑废料的颜色识别。 为了在识别过程中减小系统硬件带来的干扰,将光源和背景板均选用白色。
采用双线阵彩色CCD 的作用如下:
( 1)相比于单线阵CCD 能够获取更多的数据,得到更准确无误的建筑废料的颜色信息;
( 2)能够利用双目视觉的特点,测量传送带上建筑废料的位置信息,确保获得的分选信息准确无误。
光学系统的结构如图2。
4.3 运动控制系统
系统中的运动控制是贯穿整个建筑废料分拣系统的, 是各个模块的链接环,也是整个分选系统的关键结构。 运动控制系统主要是对控制器的选择, 主要包括PLC、PC 加运动控制器以及专用的控制器,可以根据建筑环境尽心特征性选择。 其次,运动控制系统还有选择满足作业要求负荷的电机,对选型电机进行一定次数的试验,以保证系统的正常运转。 运动控制系统最基本的要求就是具有良好的作业性能,能够有效调节各个子系统,优选最佳的工作条件,选个控制算法以及人机界面,这些是其核心要素,缺一不可。
4.4 分选系统
分选系统是整个系统的执行系统, 他的主要作用是将建筑废料根据不同颜色分开。 分选装置采用的是Denso 机械臂VS-6677GM-B,如图3 所示。
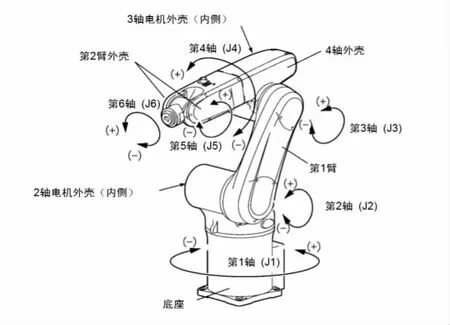
图3 Denso 机械臂结构图
VS-6677GM-B 型机械臂拥有6 自由度, 臂全长770mm,最大的工作范围为R=934mm( 工具安装表面)、R=854mm( P 点:J4、J5、J6),最大可搬运质量7kg。 若搬运的物料超过6kg 时,需要以法兰面朝下±45o的姿势使用。
