基于永磁直线电机的SVPWM滞环电流整流控制
2020-07-03张建文余海涛王玉晨
张建文,余海涛,王玉晨
(东南大学 电气工程学院,南京 210096)
0 引 言
自由活塞斯特林发电机系统是由斯特林发动机输出端与直线发电机动子直接连接,实现热电能量转换的装置。斯特林发动机稳定谐振运行时,其输出活塞位移曲线近似正弦,使得永磁直线发电机动子运行在正弦速度下[1],电机感应输出的交流电频率和幅值亦按正弦规律变化,均非恒定。发电机输出侧电能的变换,不控整流电路虽结构简单但会带来大量谐波,且输出直流电压不可调,可通过增加补偿电路改善整流器交流侧功率因数,但效果并不理想[2]。PWM整流可改善谐波提高交流侧功率因数,同时实现能量双向流动,解决自由活塞式斯特林直线发电系统自起动问题[3-4]。电压型PWM整流器(VSR)的电流控制方式主要有间接电流控制和直接电流控制两大类,间接电流控制虽简单但对系统参数波动较为敏感且动态响应较慢;直接电流控制具备快速电流反馈控制的特征,主要有滞环电流控制、固定开关频率电流控制和空间矢量电流控制等[5]。
滞环电流控制具有较快的的电流响应,系统结构简单且鲁棒性好,电流跟踪动态偏差由滞环宽度决定而不随电流变化率变动,但由于开关频率不固定,使得相应的网侧滤波电感不易设计。当前应用较多的空间电压矢量(SVPWM)控制方式,具有直流电压利用率高和低开关频率等优点,但由于需要实时获取电角度用于坐标变换,对控制器运算速度有较高要求;其次,由于动子运行在正弦速度下,两相同步旋转坐标系d-q中的各量为正弦信号,频率与动子振荡频率相同,若仍采用PI控制,该电流解耦控制将存在静差;最后,对于运行在较高频率下的斯特林发电机系统,其快速的正反向换向使得一个往复周期下三相电压相序变化一次,采用锁相环或外加光栅、磁栅等传感器的方式获取实时电角度,均不易满足高动态性能的运行要求[6-8]。
基于自由活塞斯特林直线发电机系统中电机运行特性,论文结合滞环电流控制和空间电压矢量控制两者的优点,将不定频滞环SVPWM电流控制引入到直线发电机的PWM整流中,实现交流侧的高功率因数和直流侧的稳定输出。
1 永磁直线电机数学模型
直线电机可视为将旋转电机沿径向剖分展开得到,通过有限元仿真软件分析可知,在实际运行中电机在一对极下磁链ψ与位移行程X近似正弦关系,如图1所示。
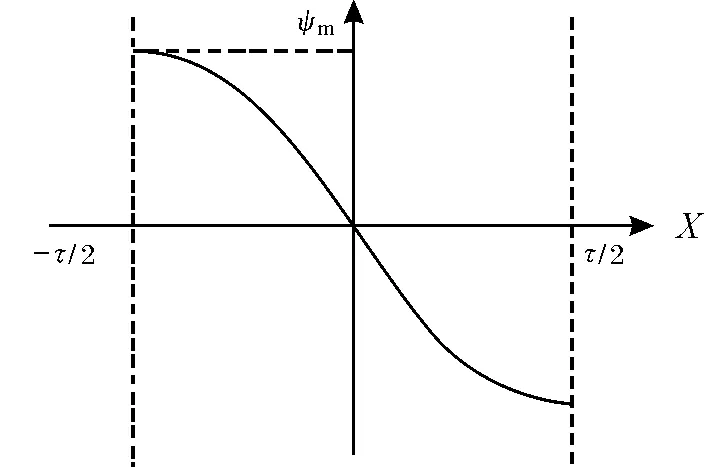
图1 磁链-位移波形
(1)
直线发电机的等效电路模型如图2所示。

图2 直线发电机的等效电路模型
根据等效电路模型可列出电压方程
(2)
反电动势方程为
(3)
式中,es为电机反电动势,Rs为电机等效电阻,Ls为电机等效电感,u为电机输出电压。
自由活塞斯特林直线发电机系统稳定运行于谐振状态时,其发电机动子位移为
X=Xmcos(ωt)
(4)
式中,Xm为动子最大位移,ω为动子运行角频率。联立式(1)、式(3)、式(4)可推导得三相反电动势为
(5)
对于三相对称系统,所述电动势在任意时刻均满足ea+eb+ec=0,则其相应的空间电压合成矢量为
(6)

2 三相PWM整流器建模与控制
2.1 控制原理
三相VSR电路及电机等效模型如图3所示。

图3 三相VSR拓扑结构
图3为三相无中线VSR拓扑结构,为分析简便在误差允许的范围内忽略交流侧源端等效电阻Rs,可得VSR电压矢量方程为

(7)
式中,V为VSR交流侧的输出电压矢量,E为发电机电动势矢量,I为VSR交流侧电流矢量。
假定参考电流矢量为I*,可知实际误差电流矢量
ΔI=I*-I
(8)
将式(8)带入式(7),化简得

(9)

(10)
对于三相VSR拓扑结构而言,其共有8个基本空间电压矢量Vk(k=0,1,…,7)可切换选择,故式(9)可变为
(11)
将式(10)带入式(11)可得
(12)
由式(12)可知,对于给定的具有零误差电流响应的参考电压矢量V*,通过选择合适的三相VSR空间电压矢量Vk(k=0,1,…,7),即可控制误差电流的变化率dΔI/dt,进而控制误差电流ΔI。
基于直线发电机的不定频滞环SVPWM电流控制三相VSR闭环控制原理如图4所示。

图4 不定频滞环三相SVPWM控制原理
外环电压环用于稳定直流侧的输出,将直流侧输出电压偏差经PI调节并与发电机电动势同步后作为电流环参考值。将参考电流I*与电机输出反馈电流I通过固定环宽的滞环比较后得到相应的比较状态Habc,结合相应V所在区域,经逻辑判断取一合适的Vk(k=0,1,…,7),使三相VSR交流侧电压电流同相位,实现单位功率因数控制
2.2 ΔI和V*的区域划分
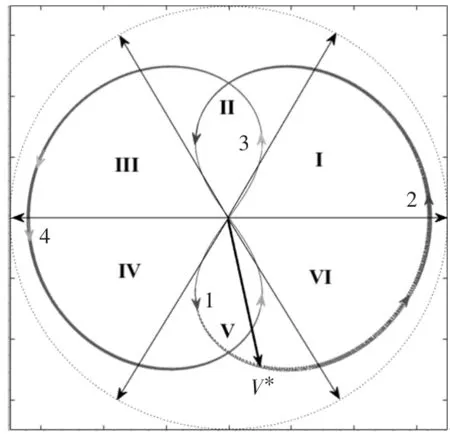
为确定某一时刻选择作用的空间电压矢量Vk,需先判定ΔI和V*在该时刻的空间位置,可对参考电压矢量V*和误差电流矢量ΔI在三相VSR电压矢量空间上进行区域划分。三相VSR空间电压矢量依据其对应的六个有效开关组合将矢量空间划分为六个区域,可据此将V*的区域也划分为六个,并记为I~VI,如图5(a)所示。为便于Δiabc各量正负极性的判别,将原V*空间坐标轴系abc顺时针旋转30°即可得ΔI空间区域划分,如图5(b)所示将六个划分区域记①~⑥。
Park和Stearns提出的颜料光学叠加原理:即不起化学作用的各种颜料混合后,混合物的吸收和散射系数符合颜料光学叠加原理。根据这一思想,可以得到混合颜料的吸收和散射系数与其配比关系为:
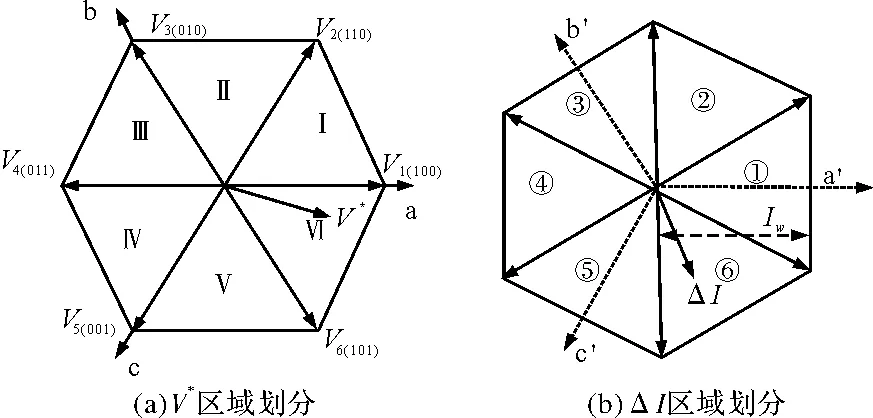
图5 区域划分
2.3 控制规则及Vk(k=0,1,…,7)的选择
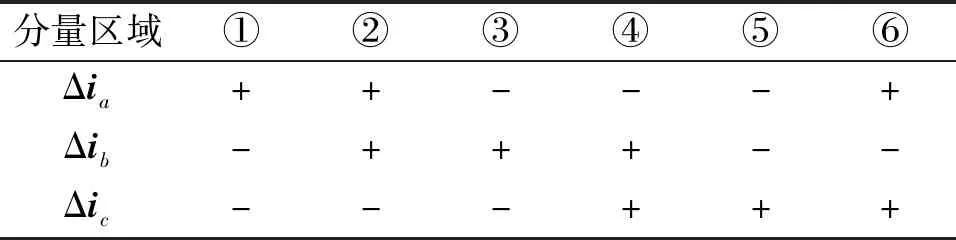
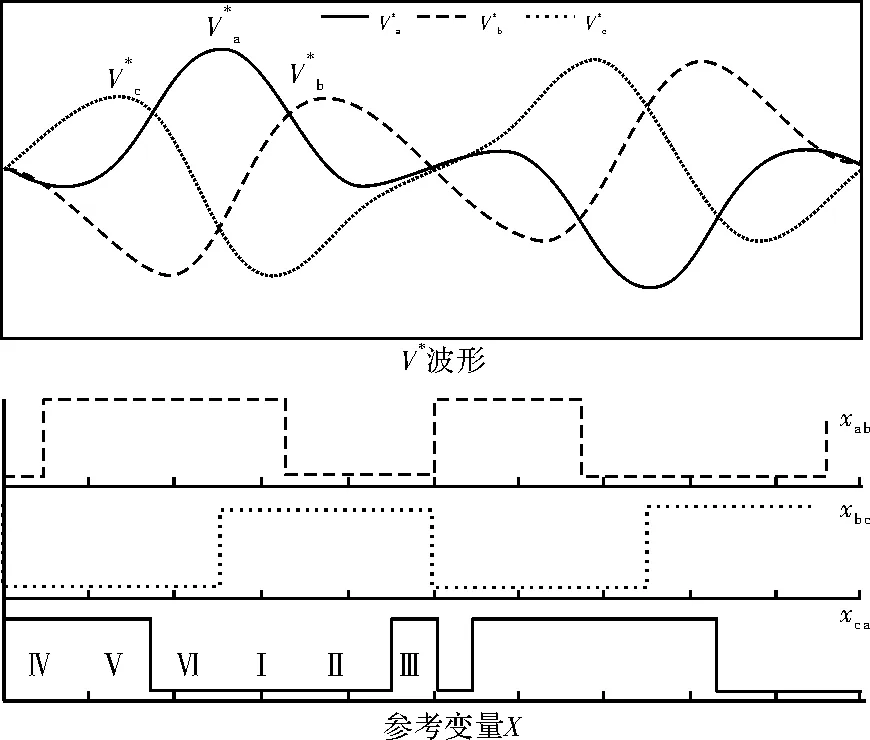
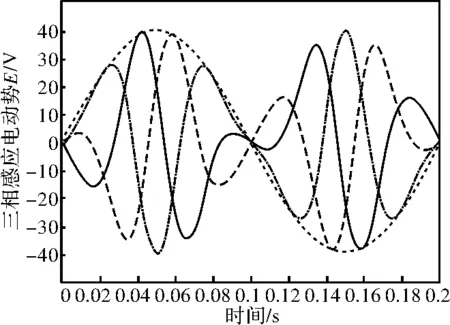
②当|ΔI| 图6 矢量关系图 依据上述推得的控制规律知,当V*位于区域I而ΔI位于区域⑥时,如图6所示,此时满足V*在区域I内变化各矢量Vk(k=0,1,…,7)与ΔI方向相反所对应的空间矢量应选择V1。同理分析V*和ΔI位于不同区域时选定的空间矢Vk(k=0,1,…,7),列写如表1所示。 由上节内容分析可知,若要确定某一时刻所选定的空间矢量,则应先判断出该时刻下V*和ΔI所处的区域。 2.4.1 ΔI所属区域判定 观察图5(b),ΔI在a、b、c三个坐标轴上的分量Δia、Δib、Δic于不同区域下具有不同正负性,可利用该特征确定ΔI所处区域。如图5(b)所示ΔI在区域⑥时有Δia>0、Δib<0、Δic>0,此时仅在该区域各分量的符号有此特征,故以此作为ΔI的区域判断依据,同理得ΔI的区域判断依据如下表2所示,Δi>0,取“+”,Δi<0,取“-”。 表2 ΔI区域判定依据 (13) 结合表2和式(13)可得ΔI区域判断逻辑表达式 (14) 由逻辑表达式(14)可知,仅当ΔI在某j区域时才有RΔI(j)=1,(j=1,2,…,6)。 2.4.2V*所属区域判定 由式(10)可知,V*可由发电机的电动势矢量E和I*合成求得,通过检测这两部分已知矢量即可计算得V*矢量在abc坐标轴上的投影一个周期下的波形如图7所示。 图7 参考矢量V*波形和逻辑量X 可以通过三个坐标轴分量的极性关系确定V*所处区域,先定义符号函数为 (15) 可记 (16) 按式(16)将参考矢量在三坐标轴上的分量进行变换后得到图7所示一个周期下逻辑量的波形。图8为一个周期下参考电压矢量变化图,图中V*矢量终点轨迹变化顺序1→2→3→4,结合图7和图8即可知在不同区域时相应Xab、Xbc、Xca三变量的不同组合关系。 图8 V*空间电压合成矢量 经上述分析可得V*区域的逻辑运算关系: (17) 式中,RV*(i)为V*区域的逻辑变量,仅当V*位于i区域时,才有RV*(i)=1,否则其值为0,其中i的取值在I~VI。 通过上述方式确定了某一时刻下V*和ΔI所属的区域后,根据V*、ΔI矢量所在区域的逻辑变量,可得到相应区域下Vk选择逻辑运算关系。 Vk的三相VSR开关函数Sa、Sb、Sc组合关系如表3所示。 表3 Vk开关函数关系 因不同的开关函数Sa、Sb、Sc组合可唯一确定一电压矢量Vk,故可通过开关函数Sa、Sb、Sc各项的逻辑运算表达式间接确定Vk(k=0,1,…,7)。由表3知,当Vk=V1/V2/V6时,Sa=1;当Vk=V2/V3/V4时,Sb=1;当Vk=V4/V5/V6时,有Sc=1。结合该关系式和表1所列矢量Vk的选择,可推导出三相VSR基于不定频电流滞环SVPWM控制的开关函数逻辑运算式为 (18) 该开关函数逻辑运算式未包括V0和V7的选择,就控制角度而言,这两个矢量是等效的,两者在选择的时需遵循开关切换次数最小原则。 利用Matlab/Simulink分别搭建正弦位移下直线电机和三相VSR的不定频滞环SVPWM电流控制模型。直线电机的参数选取如下:磁链幅值ψm=0.31Wb,等效电感L=2mH,等效内阻R=0.5欧,极距=0.02m,动子往复运行的频率f=5Hz,动子最大位移Xm=0.024m,直线电机的空载电动势波形如图9所示,图中虚线为电动势三相幅值的变化曲线,该轮廓曲线与动子速度同相位。 图9 电机三相空载感应电动势E 整流系统主电路仿真参数如下:输入的三相对称交流电的幅值和频率均按正弦规律变化,一个周期内电压最大幅值为40V,直流侧电压给定80V,电容C=4700μF,直流侧和交流侧的电压-电流仿真波形分别如图10和图11所示。 图10 直流侧输出电压-电流波形 观察图10所示波形,虚线表示平均值,VSR直流侧电压由0上升,经过约0.4s的调整后达到稳定值,并在稳定值上下脉动。在t=2s时,负载突增一倍,此时直流侧电压出现一定跌落,经过约0.8s的调整后重新稳定,由于负载功率的增大使得此时电压的波动略变大。直流侧电压、电流波动频率为10Hz,是因为当直线电机动子位移按正弦规律变化时,在一个完整的振荡周期下将出现两次速度为0的情况,相应电机输出功率也为0,负载仅由电容供电,进而导致直流侧输出电压出现2倍频于动子运行频率的波动。 图11为三相VSR交流侧A相在2~4s的电压ua和电流ia的波形,可见电流和电压保持着同相位,即交流侧实现了单位功率因数控制。 图11 交流侧电压-电流波形 论文阐述了基于永磁发电机的三相VSR的不定频滞环SVPWM电流控制方法,文中从永磁直线电机的数学模型出发,推导了电机输出反电动势表达式和相应的合成矢量。具体介绍了不定频滞环SVPWM电流控制原理和实现方式,着重就基本空间电压矢量的选择、参考电压矢量区域判定和误差电流矢量区域判定进行详细论述。在Matlab/Simulink上搭建了相应模型并进行仿真实验,仿真结果验证了滞环SVPWM电流控制的整流方式可实现直线电机三相VSR交流侧的单位功率因数控制和直流侧的稳定可控。
2.4 V*和ΔI区域判定

2.5 Vk选择的逻辑运算
3 仿真验证及分析


4 结 论
