铁路线路障碍物雷达检测关键算法研究
2020-06-30沙世伟
沙世伟
SHA Shiwei
(中铁第一勘察设计院集团有限公司 通信信号处,陕西 西安 710043)
0 引言
目前,我国高速铁路发展速度迅猛,从技术标准、施工工艺,到运营维护管理等都按高标准、高要求实施,尤其对运营环境安全等级的要求不断提高,技术不断创新。根据《信号系统与异物侵限监测、地震预警监测系统接口技术条件》(Q/CR674—2018)[1],为保障行车安全进一步提出高速铁路安全运营环境的监测要求。目前,普速铁路线路运营环境的监测主要依靠司机目视瞭望,在运营维护单位人员上道巡检、维修及营业线施工等情况下,安全防护主要靠人工对讲机和司机目视瞭望来实现,难以实现对行车环境的实时可靠监测,无法达到预警、预判的目的。
近年来,国内外学者提出采用视觉传感器和雷达传感器构建列车环境感知系统,实现对行车环境的实时可靠监测。与此同时,大量基础研究成果不断涌现,如李晓蕊[2]针对既有高速铁路综合监控视频,研究基于深度神经网络的视频快速处理算法,利用迁移学习高效地解决了不同监控场景下处理算法的优化与异物准确检测的难题;王洋等[3]提出一种基于卷积神经网络(CNN)的特征快速提取算法,提高了图像的处理速度和准确率;还有融合二维激光雷达和视觉检测技术、摄像机技术、单目热敏相机技术、融合尺度估计的核相关滤波目标跟踪算法检测、远程红外热成像与CCD 图像技术、三维激光雷达和摄像机技术等一系列基础性研究[4-9]。这些研究大多基于图像或视觉传感器开展,由于视觉传感器对环境的适应性差,如遇到雨、雪、大雾等天气情况时,检测效果会受到较大影响。为此,研究提出采用雷达传感器探测列车前方线路运行环境,以更有力地保障铁路运输环境安全。
1 铁路线路障碍物雷达检测关键算法
1.1 雷达检测方法
雷达是一种利用无线电探测和测距的电子设备,即采用无线电的方法发现目标并测定目标的空间位置,因而雷达也被称为“无线电定位”。雷达通过发射电磁波对目标进行照射并接收其回波,获得目标至电磁波发射点的距离、距离变化率(径向速度)、方位、高度等信息。雷达检测技术实质上是一种高频电磁波发射与接收技术。雷达波由自身激振产生,直接向路面路基发射射频电磁波,通过波的反射与接收获得路面路基的采样信号,再经过硬件、软件及图文显示系统得到检测结果。雷达所用的采样频率一般为数兆赫(MHz),而发射与接收的射频频率有的要达到吉赫(GHz)以上。由于雷达检测技术具有无损、快速、简易、精度高等突出优点,在很多领域得到了广泛应用。铁路线路障碍物雷达检测主要也是利用雷达环境适应能力强,性能不受光照、灰尘、雨雪、雾霾等恶劣环境影响的优势。雷达主要电气参数如表1 所示。
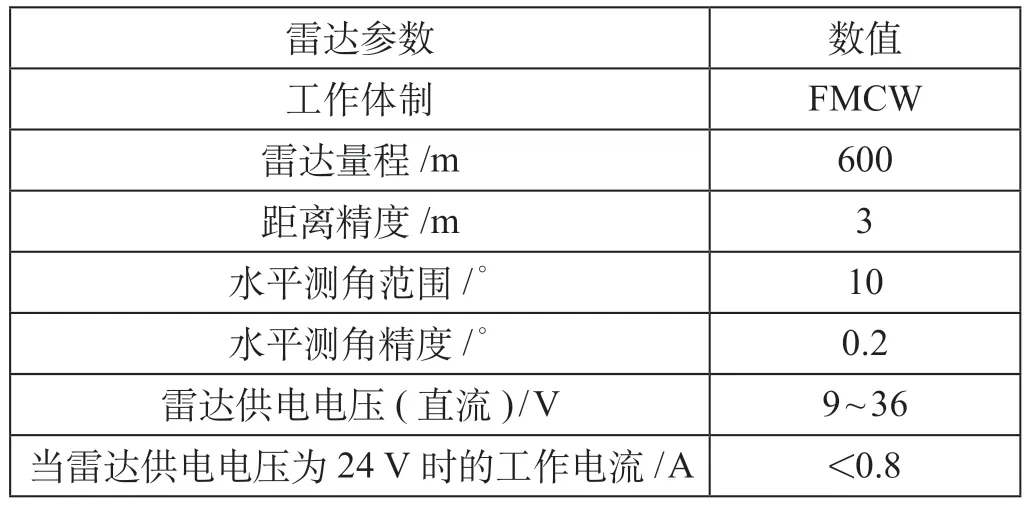
表1 雷达主要电气参数Tab.1 Main electrical parameters of radar
雷达通常安装于列车头部正中心,周期性地发射探测波,将反射回的波形信息在雷达系统中进行信号处理分析,解析出前方目标的位置信息,用于障碍物检测研究。雷达障碍物检测示意图如图1所示。图1 中,xr为车载雷达横坐标,yr为车载雷达纵坐标,a为雷达方位角。

图1 雷达障碍物检测示意图Fig.1 Radar obstacle detection diagram
1.2 铁路轨迹线分析
铁路轨迹线分析算法基于坐标来获取的线路固定数据,生成轨迹线简易地图,利用LKJ 确定车载雷达当前位置,结合铁路限界和雷达的设置参数,提取列车前方检测感兴趣区域,通过坐标变换,将实测的基于雷达运动坐标系中的目标点坐标信息转换到大地坐标系中,进而将转换后的目标点位置信息代入感兴趣区域中判别目标是否为障碍物。
因此,通过分析铁路基础线路数据,得到交点号、交点坐标、曲线半径、切线长度及夹直线长度等信息。铁路轨道线路由直线线元和曲线线元组合构成[10],曲线线元只考虑圆曲线。根据基础线路数据可拟合出轨迹线简易地图。
(1)根据交点坐标(xJDi,yJDi)求解交点线方程,计算公式为
式中:x为交点线横坐标,x∈ [min{xJDi-1,xJDi},max{xJDi-1,xJDi}],i= 1,2,…,n,其 中n为 交点线段数;y为交点线纵坐标;kJDi和bJDi分别为第i段交点线的斜率和截距;xJDi和xJDi-1分别为交点横坐标和相邻交点横坐标;yJDi和yJDi-1分别为交点纵坐标和相邻交点纵坐标。
(2)求解铁路线路轨迹线上重要点迹坐标。线路模型是由线元组成的集合,各个线元之间存在一个转折点,这些转折点即为铁路线路上的重要点迹,求解重要点迹坐标的计算公式如下。
偶数点重要点迹坐标公式可表示为

式中:xj为重要点迹横坐标,min{xJDi-1,xJDi} <xj<max{xJDi-1,xJDi};yj为重要点迹纵坐标;Ak和Bk分别为夹直线长度和切线长度,k= 0,1,…,m-1,其中m为夹直线和切线段数。
奇数点重要点迹坐标公式可表示为

(3)求解曲线线元的圆心点坐标。获取曲线线元始终点坐标结合曲线线元半径即可求得曲线线元圆心点坐标,其具体计算公式如下。式中:xrm为曲线线元圆心点横坐标,m= 0,1,…,l;yrm为曲线线元圆心点纵坐标;l为曲线线元个数;Rm为曲线线元半径;xj+1为重要点迹相邻横坐标,j=1,3,…,2 (n-1)-1;yj+1为重要点迹相邻纵坐标;krm和brm分别为求解曲线线元圆形点坐标时做的辅助线的斜率和截距。
(4)求解各线元轨迹线方程。获取线元始终点坐标记为(x始i,y始i)和(x终i,y终i),根据线元所属线元类型求解轨迹线方程。

直线线元求解该段轨迹线方程,计算公式为式中:xG为轨迹线横坐标,min{x始i,y终i} <xG< {x始i,y终i},i= 1,2,…,g,g为线元段数;yG为轨迹线纵坐标;ki为i段线元的斜率;bi为交点线的截距。
曲线线元求解该段轨迹线方程,计算公式为

(5)铁路线路整体轨迹线方程表示。将第(1)步获取的各线元的轨迹线方程整合,即可得铁路线路整体轨迹线方程为

式中:li为第i段轨迹线。
1.3 车载雷达感兴趣区域建模
感兴趣区域提取依赖于基础线路数据处理获取的列车预行驶的前方线路的轨迹线模型、铁路线路限界及雷达设置参数信息,基于这3 种信息建立的感兴趣区域建模如图2 所示。图2 中,xr,yr分别为雷达在大地坐标系中运动坐标点,K为里程,a为感兴趣区域下边界点,b为感兴趣区域上边界点,Low为雷达检测近边界距离,High为雷达检测远边界距离。

图2 感兴趣区域建模Fig.2 Region of interest modeling
车载雷达感兴趣区域建模步骤如下。
(1)车载雷达定位。实时从LKJ 监控运行记录装置中获取运行列车的里程信息,并将里程信息转换为路程K,结合里程信息和线路轨迹线方程计算出车载雷达基于大地坐标的坐标位置(xr,yr),计算公式为[11]。

(2)设感兴趣区域下边界点a在大地坐标系中的坐标位置为(xa,ya),上边界点b在大地坐标系中的位置坐标为(xb,yb),求解(xa,ya)和(xb,yb)坐标位置,其计算公式分别为

式中:Low表示雷达检测近边界距离,此处设定为表示在轨迹线la上进行曲线积分从而求得坐标位置(xa,ya),其中轨迹线la起点坐标为(xr,yr),终点坐标为(xa,ya)。

式中:High表示雷达检测远边界距离,取雷达量程值600 m;表示在轨迹线lb上进行曲线积分从而求得坐标位置(xb,yb),其中轨迹线lb起点坐标为(xr,yr),终点坐标为(xb,yb)。
(3)以(xa,ya)为起点,(xb,yb)为终点在x轴上等间隔取n个坐标点记为(xi,yi),并在每一点处求其切垂线值记为kqci。再根据铁路限界横向距离值即可确定定位检测框左右边界各经过的n+ 1 个点迹记为(xsi,ysi)和(xxi,yxi)。对获取的上、下各n+ 1 个点迹做最小二乘曲线拟合[12-13],即可获得感兴趣区域边界方程,其计算公式为

式中:ys为上边界纵坐标;xs为上边界横坐标,min{xs0,xsn} ≤xs≤ max{xs0,xsn};yx为下边界纵坐标;xx为下边界横坐标,min{xx0,xxn} ≤xx≤ max{xx0,xxn};m为拟合次数;as0,as1,…,asm为上边界拟合系数;ax0,ax1,…,axm为下边界拟合系数,拟合次数决定了拟合系数的取值。
1.4 障碍物检测判别
(1)坐标变换。极坐标变换是为了将雷达获取的目标相对雷达坐标点的距离信息及方位角信息通过极坐标变换成基于雷达坐标系的直角坐标系[14]。极坐标变换如图3 所示。
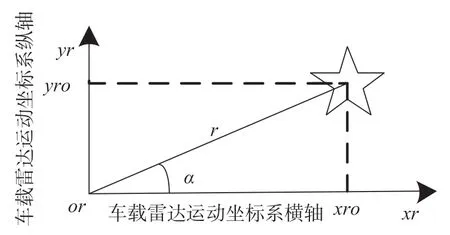
图3 极坐标变换Fig.3 Polar coordinate transformation
由图3 可知,雷达传感器基于雷达传感器坐标输出目标的回波信息,并以极坐标的形式输出目标点的距离r,方位角α信息。其中,距离r为雷达与目标之间的距离;方位角α代表目标回波与雷达主波中心线xr的夹角。将雷达基于极坐标系的目标测量信息转换至直角坐标系(车载雷达运动坐标系)中,并表示为(xro,yro),转换公式为

为了将目标点位置信息代入感兴趣区域中,判别目标是否是障碍物,需要将雷达运动坐标转换为大地坐标。雷达运动坐标与大地坐标转换如图4 所示,将目标点在车载雷达坐标系中的坐标位置信息(xro,yro)经过旋转变换之后得在旋转后的坐标系

图4 雷达运动坐标与大地坐标转换Fig.4 Conversion of radar motion coordinates and geodetic coordinates
基于大地坐标系的坐标为(xo,yo)具体的计算步骤如下。
①获取旋转角度θ。经上述分析可知,旋转角度θ即为车载雷达运动坐标系中xr轴于大地坐标系中x轴的夹角,计算公式为

②车载雷达运动坐标系旋转变换。获取旋转角θ后,可由坐标旋转变换公式计算的其在旋转坐标系中的位置坐标,计算公式为

③平移变换。将旋转变换后得到的坐标位置信息(x'ro,y'ro)经平移变换转换到大地坐标系中,计算公式为

(2)障碍物检测判别。将雷达检测目标点模块中计算获得的目标基于大地坐标系的位置坐标(xo,yo)代入感兴趣区域方程中检测判断,判断目标点是否在感兴趣区域之内,如果目标点满足感兴趣区域,则判别为障碍物。障碍物检测判别框图如图5所示。
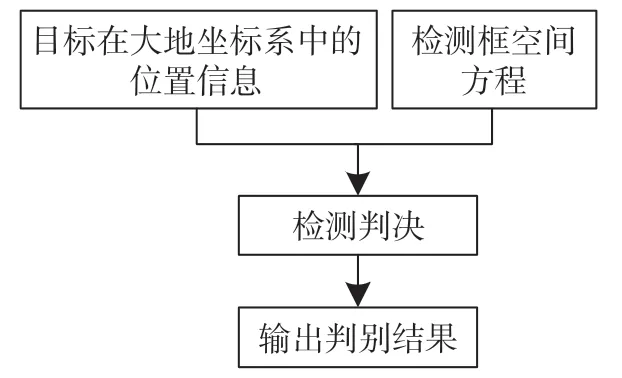
图5 障碍物检测判别框图Fig.5 Obstacle detection and discrimination block diagram
采用射线法判别:以(xo,yo)为起点建立一条水平向右的射线,设射线方程lo:y=yo,x>xo。设检测框各边界组成的边界方程分别为ls,lx,lz,ly,判别lo,ls,lx,lz,ly的相交情况,相交点个数为偶数则不是障碍物,如果相交点个数为奇数则判别为障碍物。
2 仿真实验
2.1 铁路线路轨迹线拟合仿真
选取部分铁路线路基础线路数据信息用于铁路轨迹线拟合仿真,基础线路部分数据信息如表2所示。

表2 基础线路部分数据信息Tab.2 Basic line part data information
将获取的线路基础线路数据信息代入公式 ⑴至 ⑾ 中进行轨迹线拟合,铁路线路轨迹线拟合仿真结果如图6 所示。
2.2 感兴趣区域提取仿真
研究中选取的雷达水平监控角度10°,水平角精度为0.2°,可同时检测输出60 个目标点。
当车载雷达位于坐标点(-1 600.50,-939.96)处时其在直线区段运行,代入公式⑿至⒂可以得到感兴趣区域上、下边界轨迹线方程为


图6 铁路线路轨迹线拟合仿真结果Fig.6 Simulation results of railway track trajectory fitting
直线铁路线路感兴趣区域提取仿真如图7 所示。

图7 直线铁路线路感兴趣区域提取仿真Fig.7 Simulation of extracting region of interest for straight railway line
当车载雷达位于坐标点(-1 096.30,-508.33)处时其在曲线区段运行,代入公式⑿至⒂可以得到感兴趣区域上、下边界轨迹线方程为

曲线铁路线路感兴趣区域提取仿真如图8 所示。
2.3 障碍物检测判别仿真
当车载雷达位于坐标点(-1 600.5,-939.96)处时,雷达返回的有效目标有5 个,直线铁路线路地段有效目标位置信息如表3 所示。
将5 个雷达反射回的目标点位置信息与检测区域模型融合进行障碍物检测判别,得出目标2 的位置侵入到感兴趣区域范围之内,而目标1,3,4,5 的位置在感兴趣区域范围之外,因而目标2为障碍物目标。直线铁路线路障碍物检测判别仿真如图9 所示。
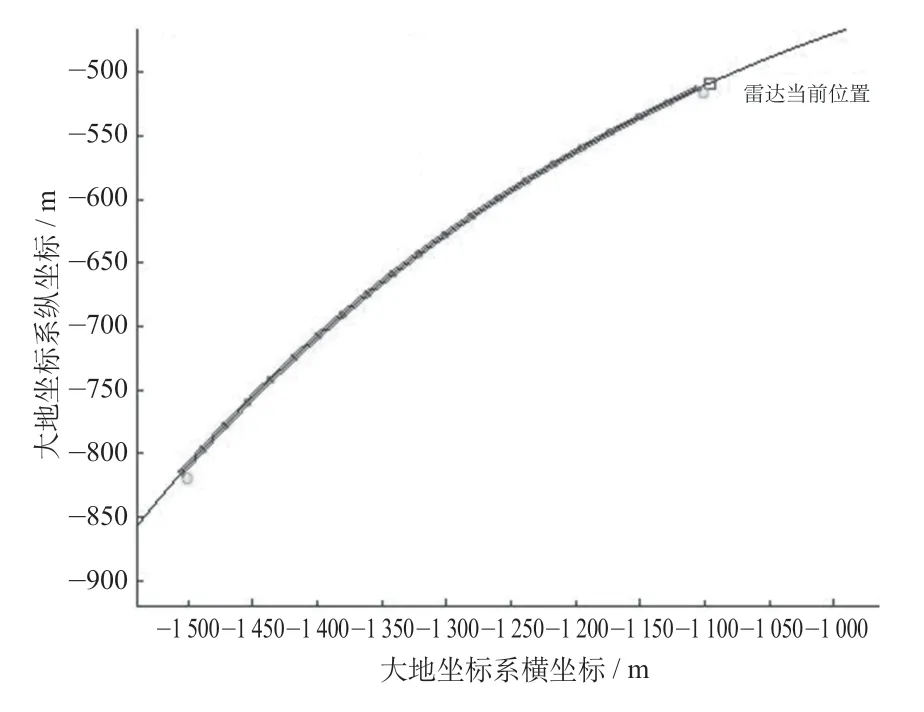
图8 曲线铁路线路感兴趣区域提取仿真Fig.8 Simulation of extracting regions of interest for curve railway line
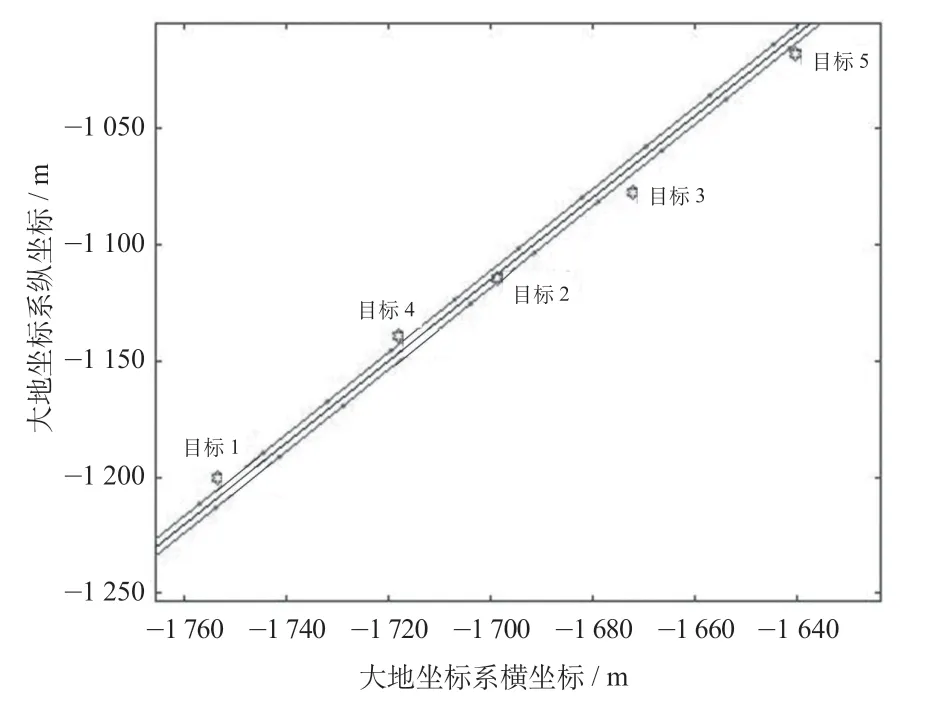
图9 直线铁路线路障碍物检测判别仿真Fig.9 Simulation of detection and discrimination of obstacles on straight railway
当车载雷达位于坐标点(-1 096.3,-508.33)处时,雷达返回的有效目标共有3 个,曲线铁路线路地段有效目标位置信息如表4 所示。
将3 个雷达反射回的目标点位置信息与检测区域模型融合进行障碍物检测判别,得出目标1 的位置侵入到感兴趣区域范围之内,而目标2 和目标3的位置在感兴趣区域范围之外,因而目标1 为障碍物目标。曲线铁路线路障碍物检测判别仿真如图10 所示。

表4 曲线铁路线路地段有效目标位置信息Tab.4 Effective target position information for curve line section

图10 曲线铁路线路障碍物检测判别仿真Fig.10 Simulation of detection and discrimination of obstacles on curve railway
2.4 障碍物检测性能评价
选取330 帧雷达测试数据,验证所提方法的合理性及检测准确性,算法实验性能评价如表5 所示。
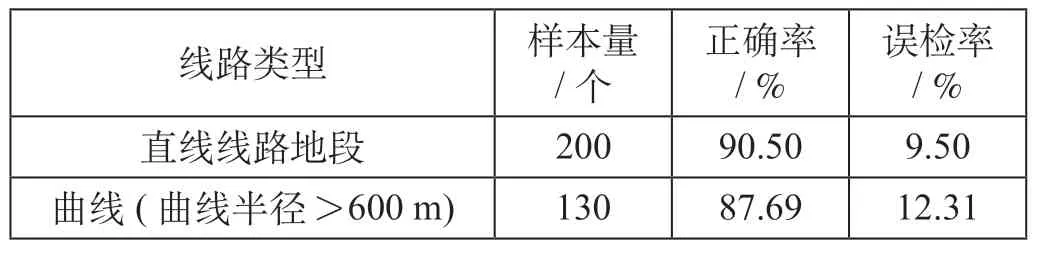
表5 算法实验性能评价Tab.5 Algorithm experiment performance evaluation
由表5 可以看出,研究提出的障碍物检测方法具有较高的准确性。同时,经过大量现场试验可知,检测横向误差在[0 m,0.33 m]范围之内波动,其平均误差为0.157 m。在多目标检测时,当目标体之间的距离小于0.35 m 时无法区分,将其视为单目标体处理。
3 结束语
随着我国铁路建设的快速发展,铁路技术水平也在不断攀升,尤其在高速铁路发展的带动下,普速铁路在技术标准化、系统集成化、智能化方面的创新技术、智慧铁路需求也顺应了铁路时代的发展要求,铁路线路障碍物雷达检测关键算法有助于保障行车运输环境安全,实现列车司机提前预知、提前预判、防止列车误撞异物,能够有效解决普速铁路行车环境安全盲区问题。另外,还应融入摄像机技术,设计人机界面,依据功能需求建立完整的系统架构,将雷达检测系统与LKJ 列车运行控制装置兼容相结合,形成以设备为主、人工参与为辅的智能化铁路运输环境安全检测系统。
