不同自动化场景对管制员眼动行为影响研究
2020-06-30林思远胡荣锦王艳军
林思远,胡荣锦,王艳军
(1.南京航空航天大学 民航学院,南京 211106;2.国家空管飞行流量管理技术重点实验室,南京 211106)
1 引言
空中交通管制员(简称“管制员”)的主要任务是为其管辖范围(扇区)内的航空器提供空中交通管制服务,指挥航空器安全到达其目的地。与地面交通相比,空中交通具有速度快、计划性和随机性强等特征。管制员需要及时作出决策,解决航空器运行之间的冲突,避免发生事故。自动化系统在空中交通管理领域的广泛应用,大大的提高了管制运行效率的同时,也增加了系统的复杂性。管制员作为系统中的决策者,通过眼动行为获取大量信息进行决策。研究管制员的眼动行为对于系统运行安全和效率具有重要意义[1]。
眼睛是人类获取外部信息最重要的通道。在过去的几十年中,不同领域的研究者针对眼球运动开展了大量的研究工作,例如,通过研究眼球运动检查潜在的神经认知功能[2]。眼睛通过眼跳运动来扫描环境,并注视相关区域,从而为视觉信息的采样提供支持[3]。注视的位置是由知觉、认知和运动之间持续的相互作用决定的,这些相互作用促进了相关信息的选择和处理[4]。
在空管领域,眼动追踪常用于评估管制员的工作负荷、疲劳程度、视觉搜索。Ahlstrom[5]等人发现随着飞机数量的增加,管制员工作负荷增加,眨眼持续时间减少,瞳孔直径增加。Stasi[6]研究了眼跳速度与认知之间的关系。Imants[7]等人发现在同一任务场景下,不同管制员的搜索策略不尽相同。Marchitto[8]等人研究了在冲突监测任务中的管制员眼动行为。Yoshida[9]等人发现航班标牌颜色的显著性会影响管制员的眼动行为。靳慧斌[10]等人研究了管制员工作负荷的实时监测方法和眼动指标监测疲劳的有效性。王燕青[11]等人发现不同流量下,管制员眼动行为存在显著性差异,同时新手管制员和专家管制员眼动模式也存在差异。王超[12]等人发现管制员对进场飞机和飞机标牌的关注度较高。Wang[13]等人研究了不同管制级别管制员的眼动行为差异。
虽然国内外基于管制员眼动行为的研究取得了一定的研究成果,但对于自动化水平对管制员眼动行为的影响研究甚少。本文将通过将自动化系统分级,采集不同自动化级别、不同管制场景下管制学员的眼动行为数据,探讨自动化水平对管制员眼动行为的影响。本研究对理解自动化水平对人类执行任务的影响,提高管制指挥效率和未来空管自动化设备的设计开发都有重要意义。
2 实验设计
2.1 实验对象
为了采集眼动行为数据,邀请了8名来自南京航空航天大学的管制专业的四年级学生参与实验,包括5名男性,3名女性,年龄19-22岁。所有被试均自愿参与仿真实验,并可根据实验绩效获得一定的报酬。实验前一天晚,所有被试睡眠良好。实验开始时,所有被试情绪稳定,没有进食咖啡等令人亢奋的食物。
2.2 实验场景设计
(1)自动化级别和流量划分。目前暂无文献对空管自动化系统进行分级。本文参考了Edwards[14]和陈志杰[15]对空管自动化系统的描述,设计了无自动化、低自动化与高自动化三种场景,具体定义见表1。同时为了确定流量对管制员行为表现的影响,每个级别的自动化条件下分别设置了大、中、小(8架、6架、3架)三种不同流量的实验场景,低自动化大流量实验场景见图1。根据实验场景流量的不同,计算机从0°、45°、90°、135°、180°、225°、270°、315°八个方向点随机选择3个点、6个点、8个点生成飞机,并随机生成危险区。三类自动化系统在实验过程中采用的实验态势场景一致,存在飞行冲突,需要保持飞行间隔。
(2)管制任务。实验任务是在规定的时间内确保飞机安全有序地飞行,飞机的飞行高度不能小于安全间隔并且飞机不能进入危险区。在无自动化实验场景中,管制员全权负责航空器安全,指挥控制飞机的运行,没有任何危险告警装置;在低自动化实验场景中,管制员全权负责航空器安全,指挥控制飞机的运行,当飞机距离危险区太近或两架飞机高度层<300米并且距离太近时,系统会给予提示,相关飞机颜色会发生改变并且有报警声音提示;在高自动化实验场景中,系统全权负责飞机安全,管制员只需要负责监视航空器,不需要任何管制指挥操作,系统全权进行指挥,当飞机距离危险区太近或两架飞机高度层<300米并且距离太近时,系统会给予提示,相关飞机颜色会发生改变并且有报警声音提示。图2为实验数据采集场景。
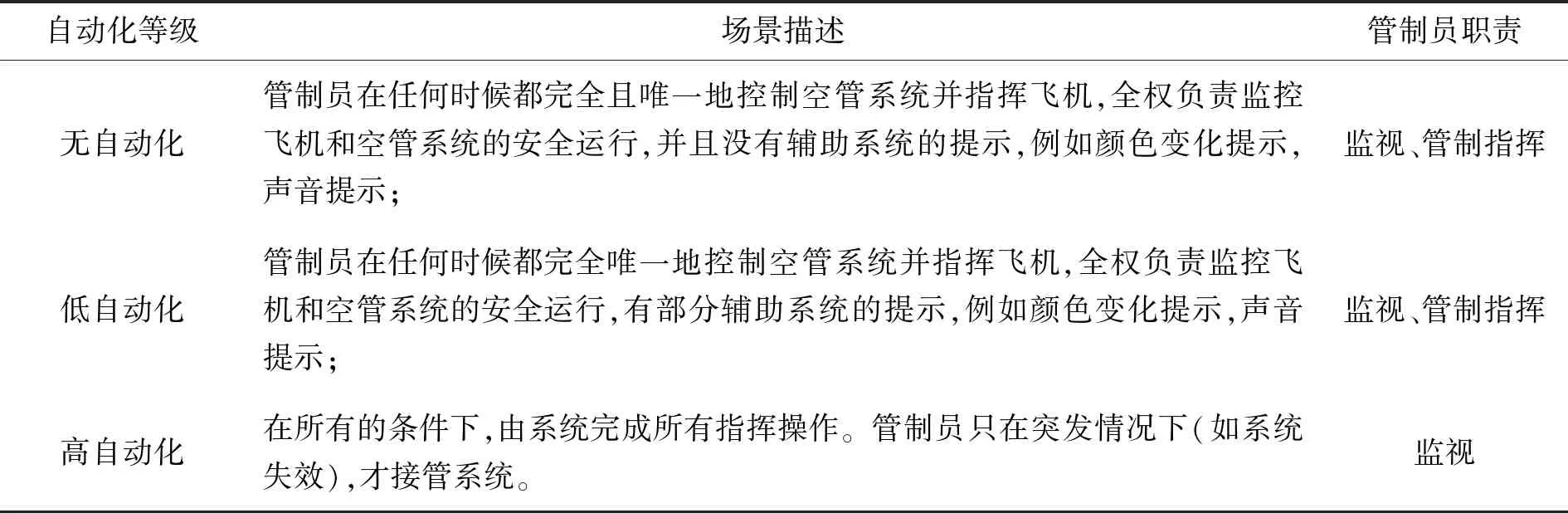
表1 三种不同自动化管制场景的定义
2.3 眼动指标的选取
本文主要分析管制员在不同自动化场景下的两种眼动行为,即注视和眼跳。注视是指是指眼睛中央窝对准某一物体的持续时长超过100毫秒的眼动行为。眼跳是指上一次注视结束到下一次注视开始的这一过程。本文选取了6个眼动指标进行分析,其具体定义见表2。
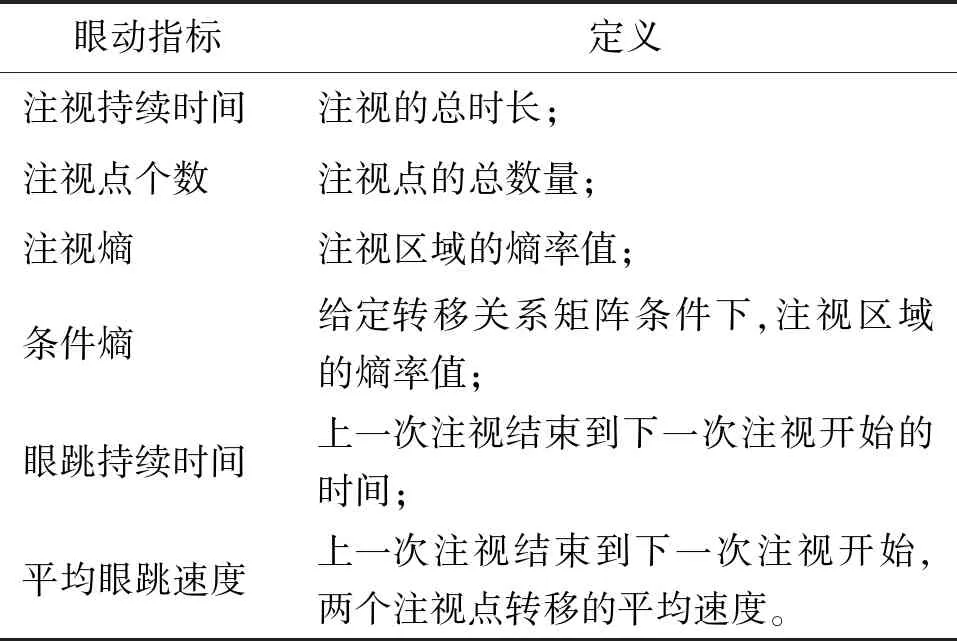
表2 实验选取的眼动指标
2.4 数据处理
本次仿真实验通过使用Seeing Machines公司生产的faceLAB 5.0采集被试者眼动数据,采样频率为60 Hz,实时追踪眼动位置延时为3 ms。实验流程如下:
(1)在实验开始前询问被试相关情况,并告知此次实验的内容、操作与目的。
(2)被试坐在屏目前,适宜地调整座椅至本人舒适。
(3)实验开始前测试眼动仪,并进行管制员眼动校准。
(4)根据无自动化、低自动化和高自动化的顺序依次进行实验,每个程度的自动化均设置了小、中、大三组不同流量的实验,被试者一共需要进行9次实验(3×3),每个实验场景时长为7 min,即需要参加63 min的实验。
(5)所有试验完成后,实验结束。
为了区分原始数据的注视与扫视点,本文采用Krassanakis[16]等人的眼动注视识别算法。本文对部分实验数据进行方差齐次性分析,文中显著性水平分为两个等级,为*P<0.1和**P<0.05。
3 结果
本文对被试注视和眼跳的相关指标进行了统计分析与讨论。图3为不同自动化场景和不同流量情况下管制员相关眼动参数的变化。表3为无自动化与高自动化中大流量与小流量场景的眼动数据差异。
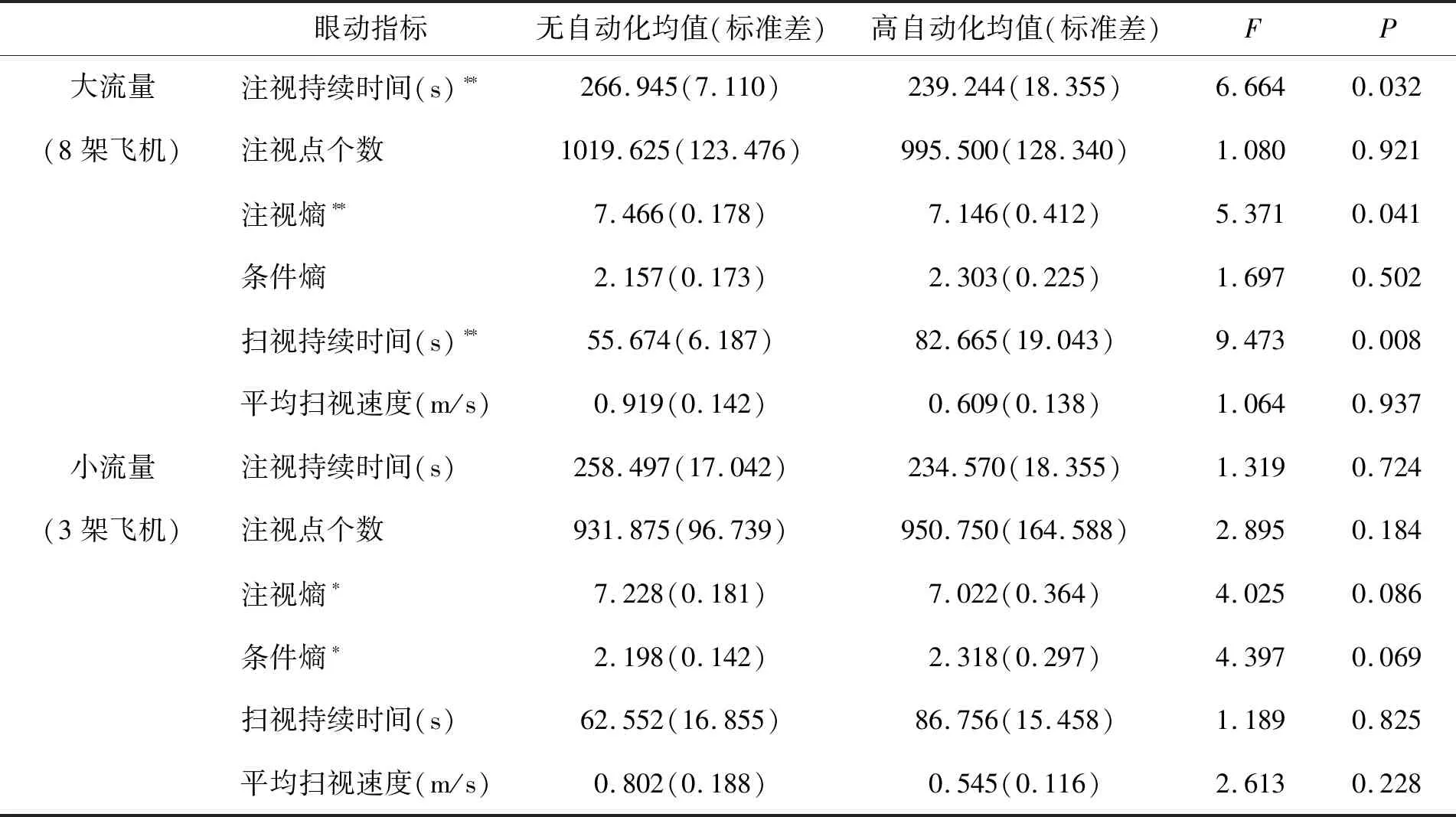
表3 无自动化与高自动化场景眼动数据差异
注:*P<0.1,**P<0.05。
3.1 注视持续时间
图3(A)反映了不同自动化水平和不同流量下注视持续时间的变化。根据表3可知,大流量下无自动化和高自动化场景中管制员注视持续时间存在显著性差异(F=6.664,P=0.023),而小流量下没有显著性差异(F=1.319,P=0.724)。
3.2 注视点个数
图3(B)反映了不同自动化水平和不同流量下注视点数量的变化。图4反映了管制员在一次实验中注视点的分布。根据表3可知,大流量下(F=1.080,P=0.926)和小流量下 (F=2.895,P=0.184)无自动化和高自动化场景中管制员注视点的个数都不存在显著性差异。
3.3 注视熵
熵的概念最初来源于物理学,后被引入信息领域,用以描述系统的混乱程度。Shannon[17]提出的熵计算公式为:
(1)
式中pi表示注视数据落在位置i的概率。注视熵反映了管制员注视点的分布状况,该值越大说明注视范围越大,注视越混乱。为了计算注视熵,我们将实验屏幕离散为1 296个小单位(按照眼动仪采集的屏幕范围大小,根据实验屏幕的分辨率,每40划分为一小段,共48×27个小单位),计算每一个小单位被注视的概率。
图3(C)反映了不同自动化水平和不同流量下注视熵的变化,图5为实验过程中每个小单位被管制员注视到的频率的典型注视分布图。根据表3可知,大流量下无自动化和高自动化场景下管制员注视熵存在显著性差异(F=5.371,P=0.041)小流量下也存在差异(F=4.020,P=0.086)。
3.4 条件熵
虽然熵与给定随机变量的不确定性有关,但自然界中的大多数过程都不是完全随机的或完全可预测的,因为它们同时具有随机性和依赖性。在这种情况下,给定系统的输出可能影响下一个输入的选择,从而使以下输入依赖于前一个输出。这些过程中的统计特性可以用1阶至n阶马尔可夫矩阵来近似[17],其中零阶或平稳分布表示每个状态被占据的总体概率,而转移分布表示从一个状态到另一个状态的变化率。因此根据平稳分布给定先验状态的条件熵(Conditional Entropy)进行加权,公式为:
(2)
在这种情况下,H是已知x的先验状态的不确定性。式中pi表示稳态分布,P(i,j)表示从注视点i转移至注视点j的概率。这个方程的值大于0,熵越大,表示的有序度越低,因此状态之间的转换模式就越难预测和复杂。本文同样将屏幕离散为1152个小单位计算条件熵。
图3(D)反映了不同自动化水平和不同流量下条件熵的变化。根据表3可知,大流量下无自动化与高自动化场景中管制员条件熵不存在显著性差异(F=1.697,P=0.502)小流量下存在差异(F=4.397,P=0.069)。
3.5 眼跳持续时间
眼跳持续时间的长短能够反映搜索效率的高低。图3(E)反映了不同自动化水平和不同流量下眼跳持续时间的变化。根据表3可知,大流量下不同自动化场景中管制员眼跳持续时间存在显著性差异(F=9.472,P=0.008),小流量下不存在差异(F=1.189,P=0.825)。
3.6 平均眼跳速度
图3(F)反映了不同自动化水平和不同流量下平均眼跳速度的变化。根据表3可知,大流量下(F=1.064,P=0.937)和小流量下(F=2.613,P=0.228)无自动化场和高自动化景中管制员的平均眼跳速度不存在显著性差异。
4 讨论
注视持续时间的长短能够反映被试信息处理的难易程度,持续时间越长,说明信息获取与处理的难度越大。注视持续时间随着自动化水平的提升而降低,说明了相较于无自动化与低自动化场景,在高自动化场景下,管制员处理信息更加容易,系统对管制员的帮助较大。这可能跟管制员职责的改变有关,由于在高自动化场景下,系统能够完成所有操作,管制员仅需监视系统,由于不需要全权指挥,管制员获取信息的态度更加随意,不需要长时间集中注意,故注视持续时间较短。注视点个数与自动化水平的关系不明显。在无自动化与低自动化中,注视点的个数随着交通流量的增加而增加;而在高度自动化场景中,这一趋势发生了改变,中流量场景注视点个数相较于低流场景注视点个数更少,这可能是由于管制员改变了搜索策略。
注视熵反应了管制员注视分布情况,注视分布越广,注视熵越高,注视越混乱。交通流量越大管制员的注视时间越长,需要关注的飞机就越多,故注视熵相应地增高。无自动化或低自动化的注视熵与高自动化差别较大。这可能是由于在高度自动化场景下,管制员只需要监视飞机,而无自动化、低自动化场景下,管制员要控制飞机,所以不可避免地需要注视到屏幕的功能区,所需的注视范围更广。条件熵同样反应管制员注视分布情况,但其考察了注视行为的规律性。总体上随着流量的增大而减小,高自动化场景下的条件熵比无自动化、低自动化更大,这说明了高自动化场景下管制员的注视行为没有规律性。
本文发现了一个有趣的现象:熵都是用于描述系统的混乱程度,相较于高度自动化场景,无度自动化和低自动化场景有着更高的注视熵,条件熵却更低。这可能是由于在无自动化、低自动化场景下,管制员观察完相应的飞机后,随之会对该飞机下达相关指令,从而注视到相应的功能区;而在高自动化场景下管制员观察完相应的飞机以后,会无规律地观察下一架飞机。综上,在无自动化和低自动化场景下管制员的注视范围虽然广,但注视呈现一定的规律性,注视熵较大,条件熵较小;而在高自动化场景下管制员的注视范围虽小,但不能很好地体现注视的规律性,故注视熵较小,条件熵较大。
眼跳持续时间随着自动化水平的提升而升高,这与注视持续时间成负相关关系,由于实验总时长是不变的,注视持续时间的增加会导致扫视持续时间的减少。平均眼跳速度随着交通流量的增加而增加,随着自动化程度的增加而减少。这可能是由于实验中飞机架次的数量决定屏幕飞机的密度,飞机架次越多,眼跳转移的距离就越短,平均眼跳速度就会相应地减少。自动化程度的增加导致平均眼跳速度减少的原因主要是在高自动化场景下管制员不须全权管制航空器,不须注意到功能区,而在人机交互界面上,功能区离屏幕航空器较远,能够产生较大的眼跳速度。
综上,自动化程度的改变能够较大的影响管制员的眼动行为,在未来的管制设备的设计、制造和管制员培训环节需要充分考虑这一改变。
5 结论
本文研究了不同自动化场景下管制员的眼动行为,得到以下主要结论:
(1)无论何种自动化程度下,管制员的注视持续时间、注视熵和平均眼跳速度随着流量的增大而增大,眼跳持续时间随着流量的增大而减小;综合三种自动化,注视点个数也随着流量的增大而增大,但在高自动化中表现不明显,条件熵随着流量的增大而增大,但在低、高自动化中表现不明显。
(2)高自动化试验场景下管制员会有更短的注视持续时间,更低的注视熵,更高的条件熵,更长的眼跳持续时间和更慢的平均眼跳速度。
(3)虽然注视熵和条件熵都是用于描述注视的混乱程度,但他们的关系呈现负相关,与无自动化、低自动化场景相比,高自动化下管制员拥有更低的注视熵和更高的条件熵。
(4)在未来空管系统设备设计、制造需要充分考虑管制员职责的变化导致管制员行为所发生的变化。
