可单重四象限整流器运行的牵引变流器主电路损耗与控制研究
2020-06-29张春磊杜广群吴强潘景宇杨志浩
张春磊, 杜广群, 吴强, 潘景宇, 杨志浩
(中车青岛四方车辆研究所有限公司,山东青岛 266031)
0 引言
城际动车组是服务于城市群和大都市圈的新型快捷交通工具,有“都市圈里的快捷使者”之称。城际动车组是在高速动车组技术平台的基础上,融合城轨车辆技术,具有速度快、起停快等特点,有效满足城市群内的快速通勤需求。同时,许多城市群客流量较小但同样具有快速通勤需求,运营使用标准8辆编组动车组会浪费运能,增加运营成本。因此,短编组(通常为4辆编组)城际动车组应运而生。使用短编组动车组既可充分利用运能,又可缩短发车间隔,满足用户需求;短编组动车组也可重联运行,单次载客量加倍,满足部分城市群大运量的需求。与现有标准8辆编组动车组不同,短编组动车组动力车数少,一旦有动力损失,列车会降速运行甚至停车,严重影响列车到达的准点率,甚至会影响其他车辆的运行[1]。
为了减轻故障影响,针对短编组城际动车组的特点,设计单重四象限整流器(简称四象限)独立工作与单个逆变器独立工作的方式实现动力最大化利用。此外,车辆启动时的主从四象限并网设计还有助于降低牵引变流器损耗[2]。因此,首先对牵引变流器主电路进行优化设计,使其具备可单重四象限运行的硬件基础;其次对单重四象限运行的控制策略进行阐述。
1 牵引变流器主电路优化设计
要使牵引变流器可单重四象限运行,首先需对牵引变流器主电路进行优化设计,使其具备可单重四象限运行的硬件基础。
1.1 现有设计
现有牵引变流器基本可分为2类:
一类主电路是共用中间直流环节的牵引变流器,双重四象限整流器模块通过低感母排与牵引逆变器模块连接,四象限整流器模块、牵引逆变器模块和辅助逆变系统共用1个中间直流环节。此外,变流器设计有1套预充电电路。若其中有某一重四象限整流器模块发生故障,就会使牵引变流器整机故障停机,该动力车损失全部动力。不具备单重四象限整流器模块独立运行的条件。共用中间直流环节的牵引变流器主电路简图见图1[3-4]。
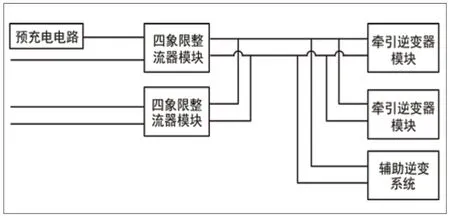
图1 共用中间直流环节的牵引变流器主电路简图
另一类牵引变流器主电路的中间直流环节完全独立。单重四象限整流器模块通过低感母排与单个牵引逆变器模块相连,组成1套牵引子系统,每个牵引变流器由2 套子系统组成,辅助逆变系统可在2 套牵引子系统内自由切换。此方案可实现单重四象限运行,且当某一重四象限故障时,辅助逆变系统可切换到另一重四象限输出维持运行,保证辅助负载的正常工作。但由于2套子系统完全独立,每套子系统均需独立采样检测回路、故障检测回路,且辅助系统切换也需通过增加多个接触器实现。故此类牵引变流器不仅器件数量变多、占用空间大,且鲁棒性也会变差、故障率变高。中间直流环节完全独立的牵引变流器主电路简图见图2[5]。
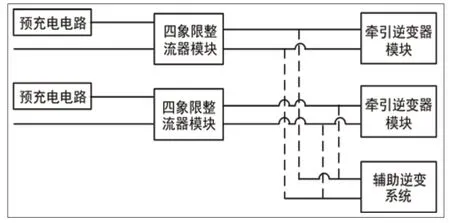
图2 中间直流环节完全独立的牵引变流器主电路简图
1.2 优化设计
考虑短编组城际动车组特点,需充分利用牵引系统的动力,以减轻动力损失对车辆运行产生的影响,因此对现有牵引变流器主电路设计进行优化,以实现单重四象限整流器运行的设计目标。
牵引变流器主电路原理见图3。该电路主要由2 套预充电回路、2 个四象限模块、2 个牵引逆变器模块和1 套辅助逆变系统组成。双重四象限整流器模块、2 个牵引逆变器模块、1个辅助逆变系统共用中间直流电压回路,同时设计双重四象限模块可独立控制。当某一重四象限整流器模块发生故障后,另一重四象限整流器模块正常运行,辅助逆变系统可实现满功率正常工作,保证空调、娱乐等系统正常工作,满足乘客需求。此外,每个四象限模块有自己独立的预充电回路,使得某一重四象限整流器故障后另一重可重新预充电启机。
可单重四象限运行的牵引变流器主电路相较于中间直流环节完全独立的牵引变流器,若中间直流环节发生短路故障,牵引变流器会整机停止工作,而中间直流环节完全独立的牵引变流器可保留一半动力。事实上,牵引变流器密闭腔的防护等级通常设计不小于IP54,且中间直流环节除电气连接点外,均采用复合低感母排连接,发生中间直流环节短路故障的概率较小,而中间直流环节完全独立所带来的器件故障率增加却难以克服。
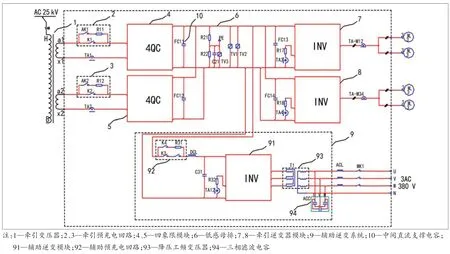
图3 可单重四象限运行的牵引变流器主电路原理
牵引变流器主要工作过程如下:牵引变压器二次侧绕组接入牵引变流器,主断闭合后,经过预充电支路将中间直流电压充到一定值后,主接触器闭合,预充电结束;然后四象限整流器启动,建立并保持中间直流环节电压稳定。牵引变流器采用架控模式,2个牵引逆变器模块分别向各自转向架上的2 台电机供电[6]。辅助逆变器系统从中间直流环节取电,经过辅助预充电回路及逆变、降压并滤波后输出三相交流电。
2 可单重四象限运行的牵引变流器控制策略
可单重四象限运行的牵引变流器,在车辆启动时设计主从四象限并网切换控制策略,并在车辆运行时根据四象限故障情况进行故障处理。
2.1 IGBT损耗对比分析
在大功率牵引传动系统中,绝缘栅双极晶体管(IGBT) 开关频率通常为 300~800 Hz。IGBT 模块由IGBT和续流二极管(FWD)组成。单个IGBT的总损耗PTr为通态损耗Pcond_Tr与开关损耗Psw_Tr[7]之和,单个二极管的总损耗PD为通态损耗Pcond_D与开关损耗Psw_D之和,即:
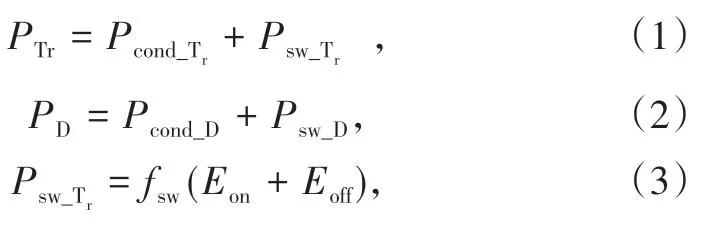
式中:fsw为IGBT 开关频率;Eon为IGBT 单次脉冲开通损耗;Eoff为单次脉冲关断损耗;Erec为单次脉冲反向恢复损耗;VCE(sat)为IGBT 饱和压降;VEC为二极管导通压降;ITr为流过IGBT 的电流;ID为流过二极管的电流;τTr为IGBT占空比;τD为二极管占空比。
以 三 菱 IGBT (CM1500HC-66R) 为 例 , 其Eon、Eoff、Erec、VEC和VCE(sat)的特性曲线见图4。当车辆分别为单重四象限启动和双重四象限并联启动且负载情况相同时,则在2种不同工况下近似可得:I1≈2I2(I1为单重四象限启动的输入电流,I2为双重四象限并联启动的输入电流)。
考虑IGBT存在导通电压,当IGBT工作电流不超过1 000 A时,由图4(a)、(c)近似可得:

图4 三菱IGBT(CM1500HC-66R)特征曲线
式中:kon为单次脉冲开通损耗比例系数;koff为单次脉冲关断损耗比例系数;kce为IGBT 饱和压降的线性比例系数。
同理,考虑二极管存在导通电压,当二极管工作电流不超过1 000 A时,由图4(a)、(b)近似可得:

式中:Erec2为双重四象限运行模式下工作电流为I2的单次脉冲反向恢复损耗;Erec1为单重四象限运行模式下工作电流为I1的单次脉冲反向恢复损耗;kec为二极管导通压降的线性比例系数。
相同负载情况下,计算可得双重四象限运行时的IGBT 损耗2·PTr2与单重四象限运行时的IGBT 损耗PTr1关系、双重四象限运行时的二极管损耗2·PD2与单重四象限运行时的IGBT损耗PD1关系如下:
式中:Eon2为双重四象限运行模式下工作电流为I2的单次脉冲开通损耗;Eon1为单重四象限运行模式下工作电流为I1的单次脉冲开通损耗;Eoff2为双重四象限运行模式下工作电流为I2的单次脉冲关断损耗;Eoff1为单重四象限运行模式下工作电流为I1的单次脉冲关断损耗。
2.2 主从四象限并网切换控制策略
由式(12)、式(13)可知,当车辆启动运行时,相同负载情况下,牵引变流器单重四象限运行较双重四象限同时启动的损耗要小,有利于牵引变流器的冷却散热。因此,在车辆启动时还根据车速设计了牵引变流器主从四象限并网切换运行的控制策略。
可单重四象限运行的牵引变流器,双重四象限模块采用主从并网切换的控制策略,根据车速滞环调节。一重四象限模块为主四象限模块,二重四象限模块为从四象限模块。一重四象限模块和二重四象限模块均无故障时,车辆启动后主四象限模块单重运行,车速超过10 km/h 后,由主四象限模块单重运行切换为双重四象限模块并联运行;车速小于7 km/h 时,双重四象限模块并联运行切换为主四象限模块单重运行;主四象限模块发生故障时,变流器自动切换为从四象限模块运行。
2.3 单重四象限故障处理
车辆正常运行且车速超过10 km/h 时,双重四象限模块并网运行。此时如果单重四象限模块发生故障,则牵引变流器由双重四象限运行切换为单重四象限运行,不需牵引变流器断电重新启机。此故障处理方案能够最大限度保持车辆动力,同时允许辅助系统满载工作,从而最大限度满足乘客和运行需求。单重四象限故障处理方法如下:当任意一个牵引逆变器模块故障时,故障牵引逆变器模块切除,另一个牵引逆变器模块和辅助逆变系统可正常工作;若任意一重四象限整流器模块故障时,封锁故障四象限整流器模块脉冲,断开故障四象限整流器模块对应主接触器,封锁对应故障四象限整流器模块的牵引逆变器模块脉冲,将该牵引逆变器模块切除,另一个牵引逆变器模块和辅助逆变系统可以正常工作[8-9]。单重四象限整流器故障处理流程见图5。

图5 单重四象限整流器故障处理流程
2.4 载波移相控制
可单重四象限运行的牵引变流器仍采用载波移相角动态调整的方法。牵引变流器利用列车网络系统,通过计算列车编组内正常工作的牵引变流器总数,并确定变流器自身相对位置,根据设定的载波移相角表确定移相角。当与网络系统通信异常时,牵引变流器通过出厂设定的内部硬线信号确定牵引变流器的自身位置,并根据设定的载波移相角表确定移相角。
3 仿真与试验
优化主电路设计后的牵引变流器主从四象限控制策略在实际车辆进行了试验验证。相关仿真试验结果如下。
3.1 损耗仿真
以CRH6A-A 城际动车组牵引系统为例,该动车组采用2 动2 拖的编组形式,每辆动车配置4 台电机。牵引变压器二次侧线圈额定电压有效值为970 V,牵引变流器额定中间直流电压为1 800 V,单电机恒功区牵引功率为345 kW,恒功区起点为61 km/h,单四象限额定容量为882 kVA,辅助额定功率约为200 kW。当车辆满转矩启动时,考虑辅助变流系统满载输出和四象限功率因数接近为1,在列车速度为10 km/h 的主从四象限模块并网切换点时的四象限输入容量为:
式中:Pm-v为某速度点下的电机功率,此处速度为10 km/h;ηm为牵引电机效率,取0.94;ηinv为牵引逆变器效率,取0.985;ηaux为辅助系统效率,取0.93;Paux为辅助额定功率,为200 kW;η4qc为四象限效率,取0.985。
使用功耗计算软件MELCOSIM,在相同负载条件下,分别对单重四象限运行和双重四象限运行做功耗仿真,仿真结果汇总见表1。

表1 仿真结果汇总 W
由表1 可知,单重四象限运行时,IGBT 损耗约为1 144 W×4=4 576 W;双重四象限并网运行时,IGBT 损耗约为2×628 W×4=5 024 W,损耗降低约448 W,车辆启动过程中的损耗降低约8.9%。
3.2 车辆启动时主从四象限并网切换
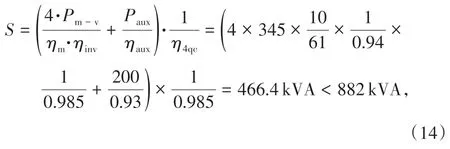
车辆启动运行和制动减速时的主从四象限并网切换波形见图6—图8。其中,1-1 为电网电压波形;1-2为主四象限模块输入电流;1-3为从四象限模块输入电流;Cursor A、Cursor B为运行切换点;2-2为车速;2-4、3-1为逆变器模块输出电流;3-2为中间直流母线电压。可见,根据车速滞环调节的双重四象限采用主从并网切换的控制策略,切换过程平滑,母线波动小。不仅减小了IGBT 功率损耗,还可有效利用四象限整流器的设计能力,降低整机故障率。

图6 车辆启动运行时和制动减速时主从四象限并网切换波形
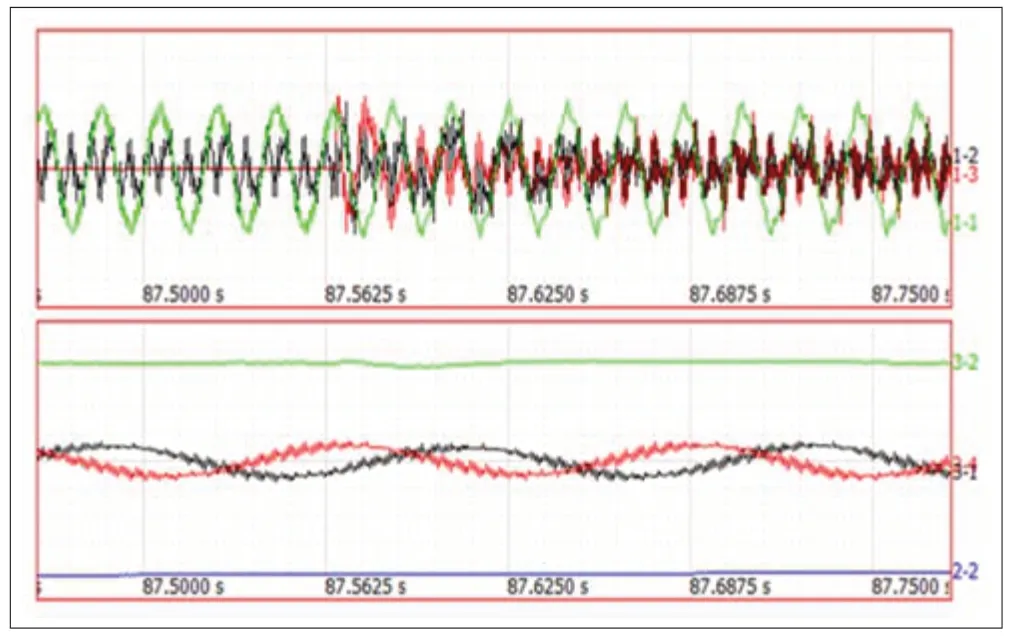
图7 车辆启动时单重四象限切换为双重四象限波形

图8 制动减速时双重四象限切换为单重四象限波形
3.3 车辆运行时单重四象限故障
车辆正常运行且车速超过10 km/h 时,一重四象限出现故障后的试验波形见图9。其中,1-2 为一重四象限模块输入电流;1-3 为二重四象限模块输入电流;Cursor A、Cursor B 为运行切换点;2-4、3-1 为逆变器模块输出电流;3-2 为中间直流母线电压。当Cursor A处一重四象限模块过热故障,封锁一重四象限脉冲,二重四象限模块继续运行;然后封锁一架逆变器脉冲,二架逆变器正常工作,辅助逆变系统正常工作。
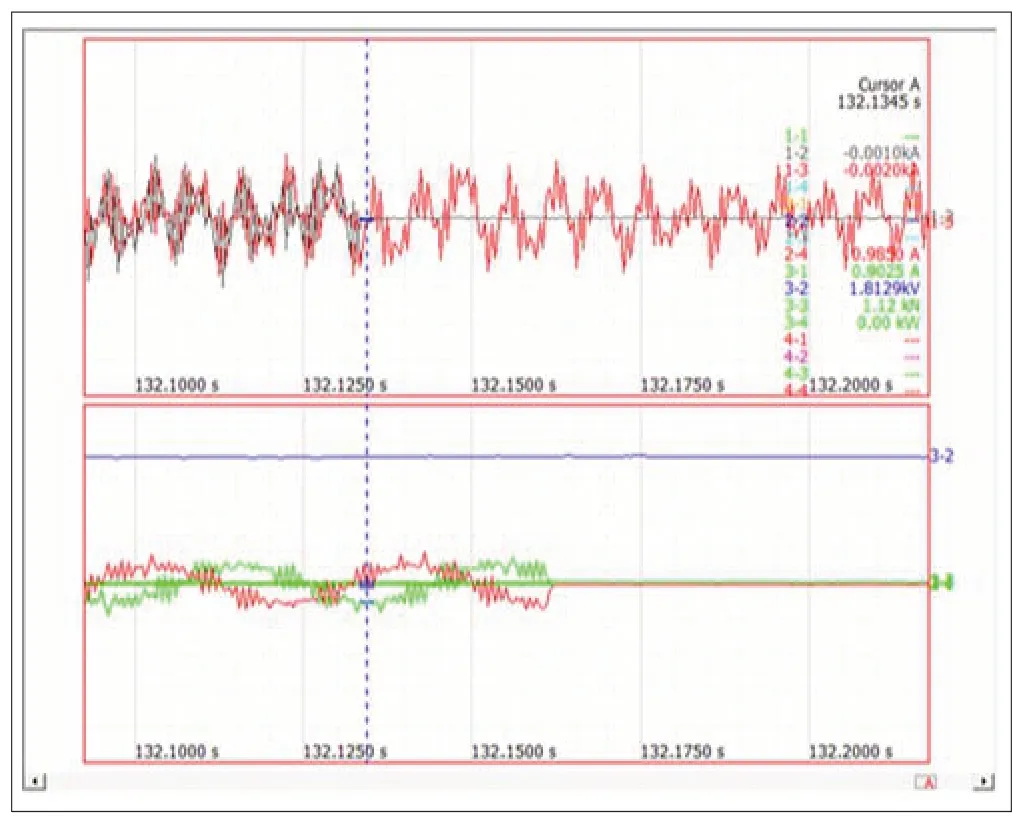
图9 一重四象限故障时刻波形
3.4 整车等效干扰电流
以4 辆编组的CRH6A-A 动车组为例,在环行铁道试验线对不同工况下的等效干扰电流进行试验。试验结果见图10。可见,动车组在不同工况、不同功率时,整车等效干扰电流≤2.5 A,符合动车组的评定要求。在车辆低速低功率运行时,动车组的整车等效干扰电流约为2.0 A。
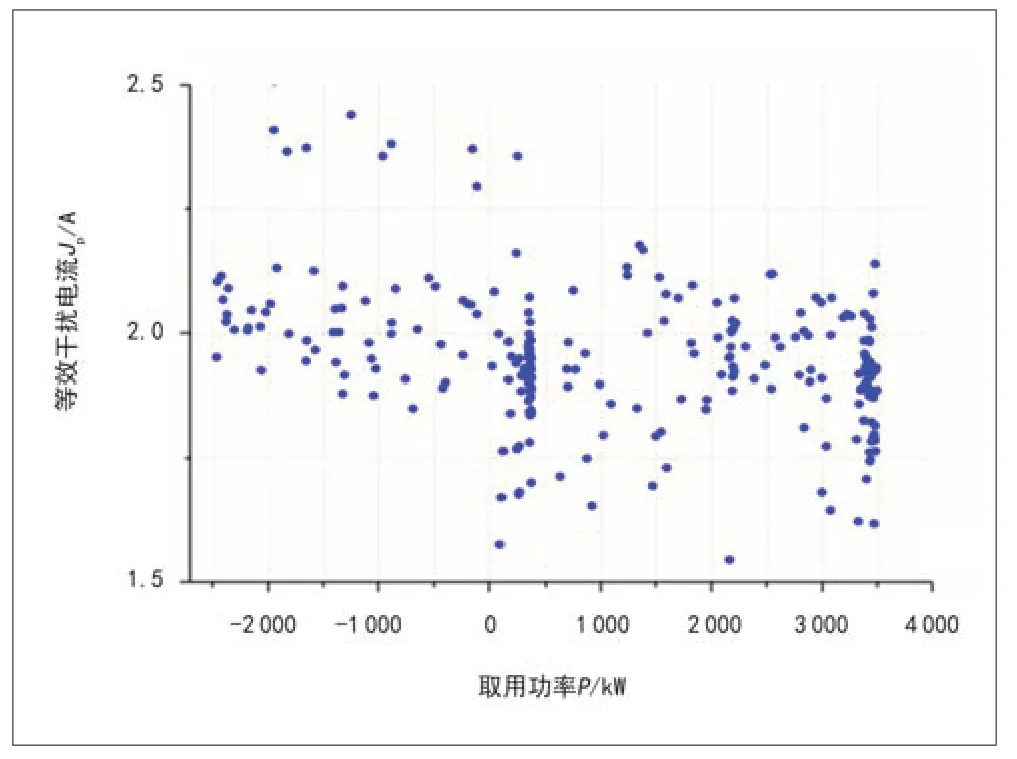
图10 CRH6A-A动车组等效干扰电流与动车组取用功率关系散点图
4 结束语
针对短编组城际动车组的特点,优化设计了可单重四象限运行的主电路,并提出其主从四象限并网控制策略。仿真和计算结果表明,列车在低速运行工况时,单重四象限运行可有效降低四象限模块的IGBT 损耗。对正常工况下的主从四象限并网切换过程和一重四象限故障时的单重四象限工作过程进行了试验验证。试验结果表明,采用主从并网切换的控制策略,切换过程平滑,母线波动小,可提高牵引变流器的动力可用性。
