基于改进AK-MCS 法的船舶板架极限强度可靠性分析
2020-06-29罗文俊王德禹
罗文俊,王德禹*
1 上海交通大学海洋工程国家重点实验室,上海200240
2 高新船舶与深海开发装备协同创新中心,上海200240
0 引 言
近年来由于船舶的极限承载能力不够,在高海情下,许多船舶出现了局部失效破损甚至引发整体断裂的海损事故。因此,船舶的极限承载能力是船舶设计中需要重点考虑的方面。目前,国内外学者对于船舶的确定性极限强度的研究颇多,却鲜有考虑诸多不确定因素的船舶极限强度可靠性研究。
蒙特卡罗(MC)法是计算可靠度最准确的方法,且适用于极限状态函数为高维度、多峰、强非线性的情况。结合代理模型采用MC 法计算结构的可靠度,只需知道功能函数值的正负号即可,因此要求代理模型尽可能准确拟合极限状态边界。邱志平等[1]利用人工神经网络构建近似模型获得近似设计点,结合MC 模拟(MCS)计算结构可靠度。Rashki等[2]提出以MC 样本点的概率密度值作为权重因子,筛选出位于失效区域的样本点。张亮等[3]采用神经网络拟合极限状态函数,从而根据函数映射关系生成大量极限状态函数值,然后通过MC 概率分析得到结构的可靠度。陈松坤等[4]以样本点到极限状态边界的距离和权重因子同时作为筛选准则,筛选出极限状态边界附近的点训练BP 模型。Xiao 等[5]开发了3 种学习函数,确保了大多数新选择的训练样本点远离现有样本点,并且使其尽可能接近极限状态函数,在不考虑初始样本不确定性的情况下产生确定的结果。侯国祥等[6]采用神经网络拟合应力函数,结合MCS 计算内燃机的可靠度指标。Lü等[7]提出结合Kriging模型和线性采样的主动学习可靠性分析方法(AK-LS)法,通过构建的主动学习函数H 筛选出对提高Kriging 模型精度最好的样本点,以较少的样本点构造高精度Kriging 模型。Echard 等[8]提出了结合Kriging 模型和MCS 的主动学习可靠性分析方法(AK-MCS),引入了一种学习函数U,通过将失效面附近的点和预测误差较大的点筛选出来,以较少的样本点实现了对极限状态边界的高度拟合。Zheng 等[9]提出 基 于改进AK-MCS 中U 函数的可靠性分析方法,通过采用U 函数筛选出初步最佳样本点,然后再筛选出与初步最佳样本点预测值异号且距离其最近的样本点,通过这两点连线,生成n 个等分点,再通过U 函数筛选出这n+2 点中U 函数值最低的点,作为最佳样本点加入训练集更新Kriging 模型。
AK-LS 方法的优点在于采样点分布在整个设计空间,全局预测精度好;不足之处是Kriging 模型的后期更新效率较低,收敛速度较慢。AK-MCS方法的优点在于采样点主要集中在极限状态边界附近,极限状态边界的拟合精度高,且后期收敛较快;不足之处在于Kriging 模型前期全局拟合精度较低,导致更新效率较低,收敛速度较慢[11]。
本文将充分利用以上两种基于主动学习的可靠性分析方法的优势,采用新的序列采样筛选准则UH,并使用K 折交叉验证(K-fold cross validation)法作为序列采样停止准则,提出改进的AK-MCS 方法,对船舶板架的极限强度可靠性进行研究。使用该方法评估船舶实际航行中局部结构失效破损概率,尤其针对船舶局部较危险结构进行可靠性研究。本文对于船舶板架极限强度可靠性的研究具有重大意义。
1 改进AK-MCS 方法
1.1 学习函数U
在AK-MCS 方法中,Echard 等[8]引入了一种学习函数U:

式中:Ĝ(X)和σĜ(X)分别为Kriging 代理模型预测值的均值和方差。通过计算所有样本点的U 值,将U 值最小点作为下一个最佳样本点加入到实验设计(DOE),同时将Ĝ(X)值接近于0 的点(即失效面附件的点)和σĜ(X)值较大的点(即预测误差较大的点)筛选出来,以更新Kriging 模型。这种方法的优点在于不需要优化算法来识别添加到DOE 的下一个样本点,便于使用Matlab 建模软件中的DACE 工具箱。
1.2 学习函数H
Shannon[10]在1948 年 提 出 了“信 息 熵”的 概念,信息熵是对信息的量化度量。熵随着变量不确定性的增大而增大,分析变量所需的信息量也随之增大。Lü等[7]提出了结合Kriging 模型和线路抽样法(LS)的主动学习可靠性分析(AK-LS)方法,其中引入了基于信息熵的学习函数H:
式中:f(Ĝ(X)) 为Ĝ(X) 的正态分布概率密度函数;H(Ĝ(X)) 为Ĝ(X) 的 混 乱 度,可 以 用 来 判 断Ĝ(X)的不确定性。若某点的信息熵越大,预测越不准确,该样本点对提高代理模型精度的作用越大。
1.3 样本点筛选准则UH
AK-MCS 方法中,样本点筛选准则采用学习函数U,通过计算所有MC 样本点的U 值,选择U值最小点作为最佳样本点,加入DOE中更新Kriging模型。这种筛选准则的缺点是Kriging 模型前期更新效率较低,收敛速度较慢;优点在于采样点集中在失效面附近,可有效提高Kriging 模型对失效面的拟合精度,且后期收敛较快。AK-LS 方法中样本点筛选准则采用学习函数H,通过计算所有MC 样本点的H 值,选择H 值最大点作为最佳样本点,加入DOE 中更新Kriging 模型。这种筛选准则的缺点是Kriging 模型的后期更新效率较低,收敛速度较慢;优点在于采样点分布在整个设计空间,对于前期提高Kriging 模型的全局预测精度贡献较大。
本文采用的筛选准则结合了这两种学习函数的优势。先使用U 函数筛选出少量分布在失效面附近的候选样本点,然后采用H 函数从候选样本点中筛选出对提高Kriging 模型精度贡献最大的点。即结合两种学习函数,在每一轮迭代中筛选出对提高Kriging 模型拟合极限状态边界精度贡献最大的样本点。这种新的筛选准则既能有效保证Kriging 模型的精度,又能提高效率,减少了调用功能函数的次数。
1.4 迭代停止准则
本文迭代停止准则采用K 折交叉验证[5]。将原始DOE 数据均分成K 组,每个子集分别做一次验证集,剩下的K-1 组子集作为训练集,生成K 个代理模型。根据每个代理模型计算失效概率,迭代停止准则为
1.5 收敛准则
在MC 方法中,MC 样本容量应足够大才能确保失效概率的准确性。尤其是对于失效概率非常低的情况,需要大量MC 样本点。可根据变异系数评估样本点数量nMC对失效概率计算结果的影响[12]。

每次迭代停止时,需要对输出的变异系数进行校核,以确保样本容量足够大。本文取变异系数C.O.VPf≤0.05。
1.6 改进AK-MCS 方法的计算流程
改进AK-MCS 方法(AK-MCS(UH))的建立具体步骤为:
1)在设计空间中采用MC 采样生成样本集S,所有样本点均不调用有限元模型(FEM)。
2)生成训练集。采用拉丁超立方(LHS)采样生成少量样本点,生成的样本点调用FEM 计算得出响应集,建立初始DOE。
3)根据初始DOE,使用DACE 工具箱建立Kriging 模型。
4)用Kriging 模型预测S 集中样本点的响应值,采用MC 法计算失效概率P̂f。
5)采用样本筛选准则UH筛选出最佳样本点X。
6)开始停止迭代准则判断。若满足停止条件,则进入下一步,否则将样本点X 加入DOE 中,返回步骤3)。重复上述步骤,直到满足停止准则。
7)进行收敛准则判断。检查失效概率的变异系数C.O.VPf,保证该次试验有足够多的样本点。若计算结果低于设定值,则输出失效概率,流程结束;否则生成新的MC 样本点,加入到S 集,返回步骤4),重复上述步骤,直至满足收敛准则。
以上步骤的流程图如图1 所示。
在实际工程应用中,训练集中样本点的响应值往往需要通过耗时的有限元计算得到,训练集过大意味着计算成本巨大。而本文方法致力于以最少的样本点建立具有足够精度的Kriging 模型,从而尽可能减少调用有限元模型的次数,缩减计算成本。
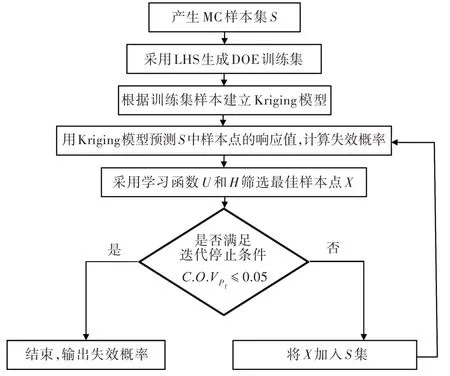
图1 改进AK-MCS 方法流程图Fig.1 Flow chart of improved AK-MCS method
1.7 算例展示
为验证本文提出的改进AK-MCS 方法的有效性和适用性,引用了文献[8]的一个非线性振荡器数学算例,其物理模型如图2(a)所示。采用不同可靠性方法计算对比。该振荡系统的动态响应,如图2 所示。

图2 非线性振荡器Fig.2 Nonlinear oscillator
该模型的功能函数为[8]

献[8]。6 个变量均为各自独立的随机变量,其分布范围如表1 所示。

表1 非线性振荡器设计变量特性Table 1 Nonlinear oscillator design variable characteristics
基于MC 抽样的7×104个样本点,分别运用MC 法、AK-MCS(U)法、AK-MCS(H)法 以 及AK-MCS(UH)法等对样本点进行求解,所得结果如表2 所示。
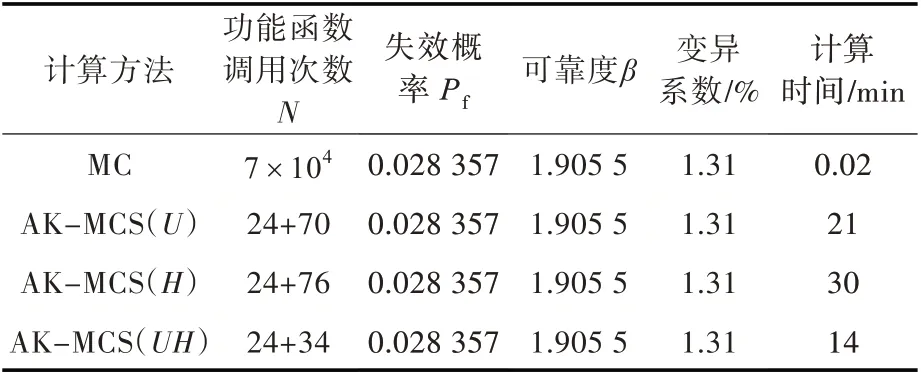
表2 非线性可靠性计算结果Table 2 Nonlinear reliability calculation results
表2 中,功能函数调用次数“24+70”为24 个初始样本点加上70 个筛选样本点。对比结果可以看出:AK-MCS(UH)方法计算的失效概率与MC法的结果一致,说明AK-MCS(UH)方法具有良好的计算精度;AK-MCS(UH)法仅调用了58 次功能函数,比AK-MCS(U)少调用了36次,比AK-MCS(H)少调用了42 次,显著减少了功能函数的调用次数;AK-MCS(UH)的 计 算 时 间 为14 min,比AK-MCS(U),AK-MCS(H)的计算时间各减少了7和16 min,说明AK-MCS(UH)法提高了求解效率。
2 基于改进AK-MCS 法的船舶板架极限强度可靠性分析
由纵骨和横梁组成的板架结构是船舶结构的主要组成部分,因此有必要校核船舶板架的极限强度。在求解船舶板架的极限强度时,材料特性、板厚及载荷等都具有一定的随机性,会对船体板架极限承载能力的计算结果产生影响,因此需要对船舶板架结构极限强度可靠性进行研究。本文将基于改进的AK-MCS 方法对文献中[13]一艘苏伊士型油船的船底板架进行极限强度的可靠性研究,截取船舶中加筋板计算其在组合载荷下的失效概率。几何模型如图3 所示。

图3 加筋板几何示意图Fig.3 Geometric diagram of stiffened plates
加筋板承受中拱弯矩σx,hg作用,底板承受横向水压力P。加筋板模型的功能函数为
G=σU-σx,hg(6)
式中:G<0 为结构失效;σU为加筋板的极限承载能力,即在横向压力、纵向弯矩组合载荷下的极限强度,调用有限元模型计算;σx,hg为加筋板在中拱状态下的实际承载压力,可根据Shu 等[13]提出的经验公式进行计算。

以上各式中参数含义如表3 所示。

表3 加筋板模型参数Table 3 Stiffened plate model parameters
该计算模型选用了纵向双跨距的1/2+1+1/2单根加筋板模型,如图4 所示。本模型同时考虑了几何尺寸与外载荷的不确定性,加筋板模型参数如表3 所示。
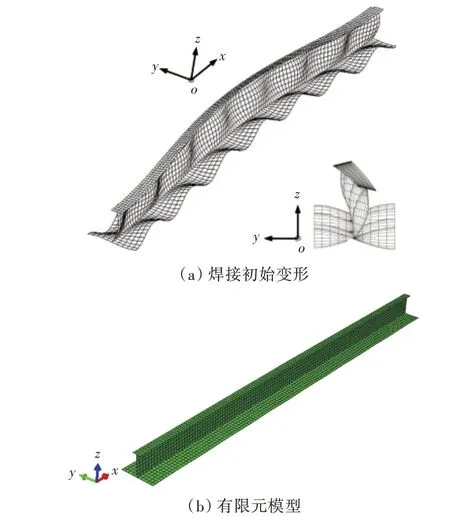
图4 加筋板有限元模型以及焊接初始变形(比例因子为50)Fig.4 Finite element model of stiffened plates and initial deformation of welding(scale factor is 50)
图5 为尺寸取设计值时加筋板在极限状态下的有限元计算结果。
从图5(b),图5(c),图5(d)可知,板架的失效模式分别由梁柱屈曲失效、桁材腹板失效和加筋侧倾失效3 种失效模式耦合组成。

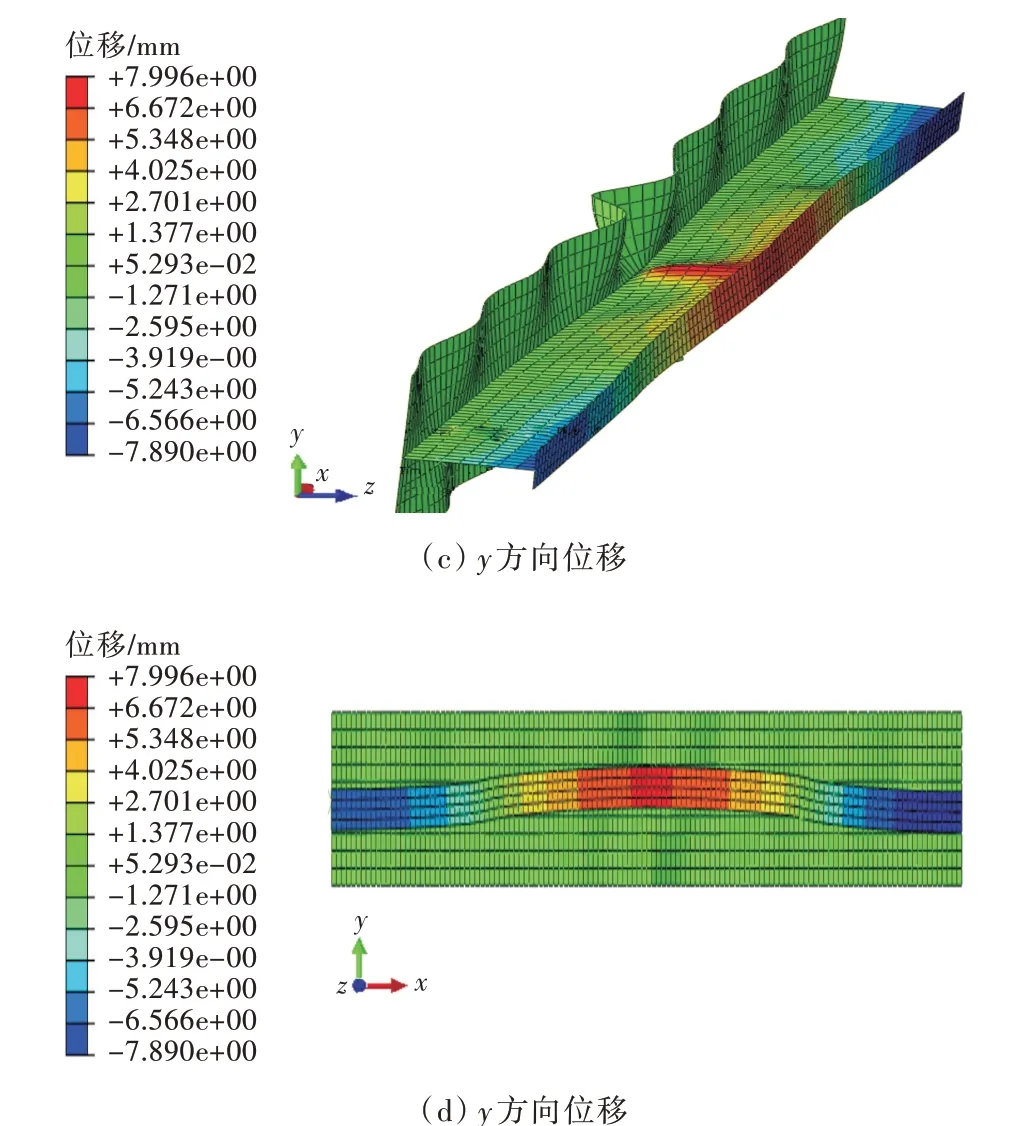
图5 加筋板极限状态下有限元模型计算云图(变形放大倍数为8)Fig.5 The finite element calculation cloud chart of stiffened plate under limit state(deformation magnification is 8)
本算例对比了文献[4]的改进蒙特卡罗法(BP-MC)[4]和文献[13]采用MCS 以及结合二阶响应面的MC 模拟(RS-MC)计算的加筋板的失效概率。同时,采用AK-MCS(U)法,AK-MCS(H)法以及AK-MCS(UH)法对其进行求解,计算结果如表4 所示。
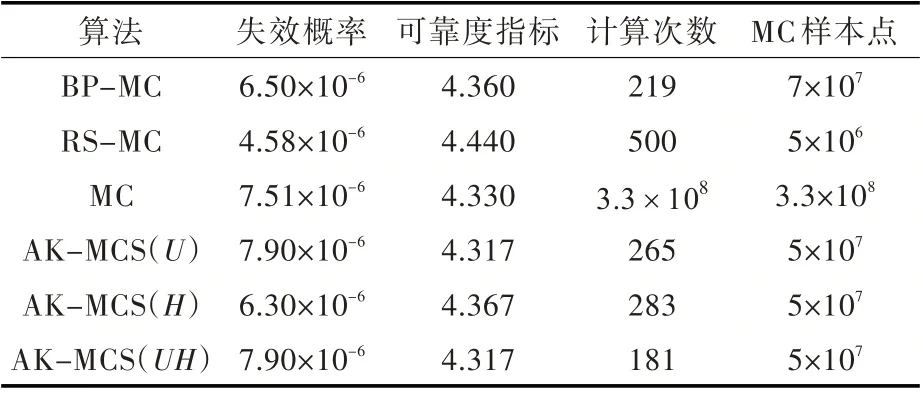
表4 加筋板可靠度计算结果Table 4 Stiffened plate reliability calculation result
由表4可知,改进AK-MCS方法(AK-MCS(UH))计算得到的失效概率最接近MC 方法的计算值,具有较高的计算精度。且仅需调用有限元模型181 次,比AK-MCS(U)法、AK-MCS(H)法 和BP-MC 法各少调用84,102 和38 次,是6 种方法中调用有限元模型次数最少的可靠性方法,有效降低了计算成本,对于船舶板架结构极限强度计算具有较好的适用性。
3 结 论
在工程实际应用中,通常保留了非常大的安全裕度,因此失效概率非常小。在此情况下,难以进行可靠性评估,尤其是当单次有限元模型仿真耗时较长时,计算成本将非常庞大。船舶结构极限强度可靠性分析具备以上特点,为此本文提出了改进AK-MCS 法,并将其应用于组合载荷作用下的船底板架极限强度可靠性分析,得到如下主要结论:
1)改进AK-MCS 法具有较高的求解精度和效率。以非线性振荡器数学模型为例,验证了该方法的可行性。可见,改进AK-MCS 法的计算结果与MC 法结果一致,且显著减少了调用功能函数的次数和计算时间,在保证求解精度的同时提高了计算效率。
2)改进AK-MCS 法在船舶板架极限强度可靠性研究中具有良好的适用性和高效性,与MC法计算结果相比,计算误差只有5%,与文中其他方法相比最接近于MC 法的计算结果,且调用有限元模型次数比原方法减少了32%,有效降低了计算成本。
本文所提改进AK-MCS 方法具有较好的继承性,适用于其他行业的高可靠度工程结构问题,也可以与智能优化算法结合进行可靠性优化设计。
