高速船型融合特型球鼻艏的多方案优化设计
2020-06-29陆超崔敬玉孟凡华余克涛
陆超,崔敬玉,孟凡华,余克涛
1 中国舰船研究设计中心,湖北武汉430064
2 武汉船舶设计研究院有限公司,湖北武汉430064
0 引 言
水面舰船装备球鼻艏的目的主要是为了安放声呐。随着对声呐性能要求的不断提高,声呐体积不断增大,用于安放声呐的球鼻艏也趋于大型化。此外,像水滴形球鼻艏这一类的球鼻艏属于超大型附体,并不能起到常规球鼻艏的降阻作用,有时反而会使船舶阻力大幅增加[1-2]。
国内外对于艏部安装特种发射装置或超大尺度声呐系统附体的舰船设计,主要是基于一种使用工况,对舰船的快速性要求不高,船型上较易实现。其中,国内船型主要用于试验,设计航速低,属于低速船。在国外,前苏联、日本等国设计过类似船型,如前苏联的1823/1824 型武装侦察渔船/鱼雷试验船,由拖网渔船改装/改建而成,目前,俄罗斯海军仍保留有1 艘OC57,如图1 所示。该船水线以下设“凸”型附体,中部为攻击声呐导流罩,右舷装有1 具650 mm 鱼雷发射管,左舷装有1 具533 mm鱼雷发射管。其排水量为685 t,总长60 m,最大航速12 kn,正常作业航速不超过10 kn。日本“日向”级直升机驱逐舰,如图2 所示,配备了为大型主、被动声呐阵专门设计的特型球鼻艏,其长度为40 m,最大宽度约3 m,最大航速达30 kn。

图1 OC57Fig.1 OC57

图2 “日向”级直升机驱逐舰Fig.2 Hyuga class helicopter destroyer
现有的国内外类似船型使用工况均单一,除“日向”级外,其他类似舰船的航速指标低,附体对船型的影响不敏感。
而本文描述的某高速船型(以下简称“本船”),具有较为特殊的试验用途,需有2 种使用工况:浅吃水时应达到约25 kn的高航速(傅汝德数约0.494),深吃水时应达到约15 kn 的较高航速(傅汝德数约0.295),二者均处于高航速范畴。同时,该船需在艏部布置用于安放特种试验装置的不同于常规球鼻艏的特型附体。配套的特型附体相对主船体尺度直径大、长度长,水下排水体积大。此外,该船需在高原地区使用,2 种工况下吃水变化范围大,这在国内船舶设计中较为少见。球鼻艏在满足使用和总布置要求的前提下,应兼顾尺寸大小和位置安排,使其外形对总阻力的增值最少[2]。因此,有必要对该高速船型融合特型球鼻艏给快速性带来的影响进行研究,寻求优化的设计方案。
常规的球鼻艏船设计是以肥大船型匹配相对小尺度的球鼻艏附体为主,设计优良的球鼻艏具有较好的减阻效果,进而能够很好地改善船舶运营的经济性[3-4],而本文研究的高速船由于功能需求的原因,特种球鼻艏附体的外形尺寸受限,且需与尺度相对较小的船体融合,设计优化思路与常规球鼻艏船迥然不同。
本文拟通过逐步趋近分析方法对该船型及附体进行多方案对比分析,采用数值模拟的方式优选阻力性能好的船型,并结合模型试验对船型方案进行验证,最终优化形成满足布置需求且快速性能兼优的船型,使本船型在尺度限制和主机功率范围内,达到浅吃水最大航速,同时使特型附体体积尺寸满足特种设备布置空间要求。
1 高速船型及特型附体约束条件
根据本船的任务书以及现场建造条件,主要设计约束为:
1)受干船坞的限制,总长不能超过70 m;
2)深吃水工况时,吃水不小于5.5 m;
3)艏部需配备特种装置,因此艏部特型附体半径不小于1 m;
4)浅吃水时,航速要求不小于25 kn,航行水域处于高原地带,主机功率得不到充分发挥。
基于上述约束条件,本船主要参数选择如表1所示。
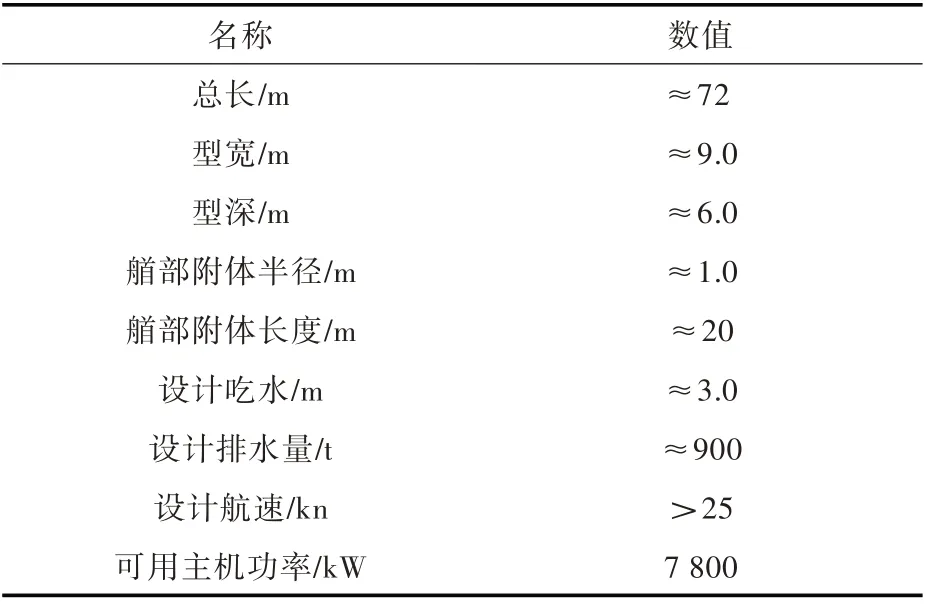
表1 船舶主要参数Table 1 major parameters of the ship
常规的描述球鼻艏几何特征的主要参数为球鼻艏几何形状、纵向长度比、相对浸深、宽度比、面积比、体积比等[5-7],而本文球鼻艏由于特种装备布置的需求,球鼻艏参数较难选择阻力最小的构型。该球鼻艏附体要求模拟水滴形艏部线型并满足某型装置布置的空间要求,特型附体是半径为1 m 的圆柱型、封头为椭球形的球冠面,与船体光顺过渡。
2 基于快速性的多方案优化方法
在前述约束条件下,本船型的优化目标为:
1)在尺度限制和主机功率范围内,达到浅吃水时的最大航速;
2)特型附体体积尺寸满足特种设备布置空间要求。
本船基于上述目标进行船型设计和优化。
2.1 分阶段的船型多方案优化
以往的船舶线型设计,主要是通过参考成功的母型船、依据设计者的经验和进行船模试验来完成,这要花费大量的时间和费用,而且具有很大的局限性[8]。本文将采用STAR-CCM+软件进行高速水面舰船绕流场的数值模拟,并基于数值结果预报船舶阻力,进而结合船舶布置、稳性等要求进行船型优化。优化工作大致分为4 个阶段:
1)根据数值模拟结果,将船舶横剖面线型由尖舭变成圆舭。这使得该船型阻力或有效功率(设计航速与船舶总阻力之积)与原来的尖舭相比降低了2.4%。此收益源于在相同尺度、相似横剖面线型条件下,圆舭较尖舭湿表面积小。下文的船型优化工作主要在圆舭线型基础上进行。尖舭和圆舭线型分别如图3 和图4 所示。

图3 尖舭横剖面线型Fig.3 The body plan with sharp bilge

图4 圆舭横剖面线型Fig.4 The body plan with round bilge
2)在本船其他尺度受限的条件下,只能从型宽上进行优选。本文对比了相同船长、吃水,不同型宽(9.2 和9.4 m)、排水量的两种船型,编号分别为FT2-WUTM0-B92 和FT2-WUTM0-B94。考察了二者的光体阻力与有效功率。因后者的船型湿表面积、排水量均较前者大,故其船型阻力或有效功率较前者增加了约1.9%。在综合考虑稳性、主机布置空间后,此阶段确定采用型宽9.4 m 的船型方案,两种船型的横剖面线型分别如图5和图6所示。
3)在阶段2 确定型宽为9.4 m 的基础上修改艏部线型为圆柱形,以更好地模拟艏部流场。本阶段所得船型方案模型图如图7 所示。
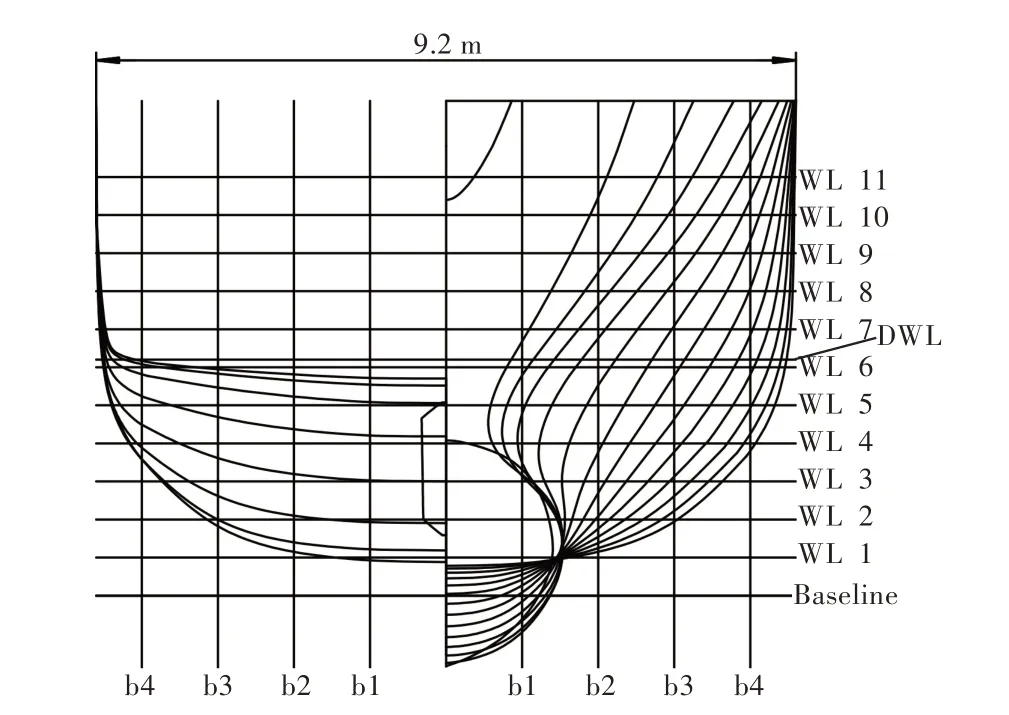
图5 FT2-WUTM0-B92 船型方案横剖面线型Fig.5 The body plan of FT2-WUTM0-B92 scheme

图6 FT2-WUTM0-B94 船型方案横剖面线型Fig.6 The body plan of FT2-WUTM0-B94 scheme
图7 FT2-WUTMB1 船型方案模型图Fig.7 Model diagram of FT2-WUTMB1 hull form scheme
4)结合艏部设备布置要求,修改艏部线型,取消艏部折角,并增加呆木、舵、轴系、托架等附体。本阶段所得光体船型方案(FT2-WUTMB4)和全附体船型方案(FT2-WUTMB4-APP)的模型图分别如图8 和图9 所示。

图8 FT2-WUTMB4 光体船型方案模型图Fig.8 Model diagram of FT2-WUTMB4 bare hull scheme

图9 FT2-WUTMB4-APP 全附体船型方案模型图Fig.9 Model diagram of FT2-WUTMB4 hull form scheme with all appendages
4 个阶段的船型优化工作不是单纯地以提高快速性为目标,而是在型宽、大型附体及其与主船体过渡方面,充分考虑稳性和主机、特种装备布置的需要,为船舶的功能实现提供保障。
2.2 数值模拟的数学模型
2.2.1 控制方程
本文采用基于涡粘假定的Realizable k-ε湍流模型进行数值模拟,该方法是目前工程上应用比较广泛的湍流模型,其控制方程为Navier-Stokes方程组[9]。在笛卡尔坐标系中,根据质量守恒与动量守恒定律,不可压缩流体的控制方程为:
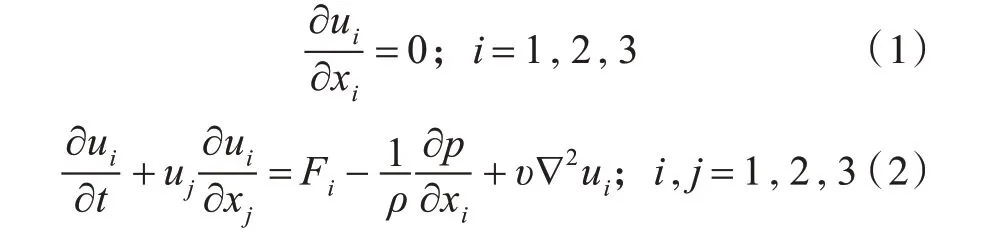
式中:ui,uj为速度分量;xi,xj为位移分量;ρ为流体密度;p为压力;υ为流体的运动粘性系数;t为时间;F为雷诺应力。
控制方程(2)高阶非线性的特征,导致对其尚无解析求解的手段;而高雷诺数特征则导致舰船绕流场为湍流,目前,湍流的数值模拟多采用非直接模拟方法,包括大涡模拟(LES)和雷诺平均法。大涡模拟对计算机硬件的要求较高,在实际工程计算中应用尚不多见;雷诺平均法是采用非稳态的Navier-Stokes 方程对时间作平均来描述湍流,这种描述湍流流动的方法称为雷诺平均法,也即RANS 方法。由于RANS 动量方程中出现了未知的雷诺应力项,故需建立一定的模型。目前工程应用比较广泛的湍流模型有涡粘模型和雷诺应力模型。本文工作采用基于涡粘假定的Realizable k-ε湍流模型进行动量方程中雷诺应力项的封闭。
2.2.2 几何模型
4 个阶段船型方案的主要元素如表2 所示。
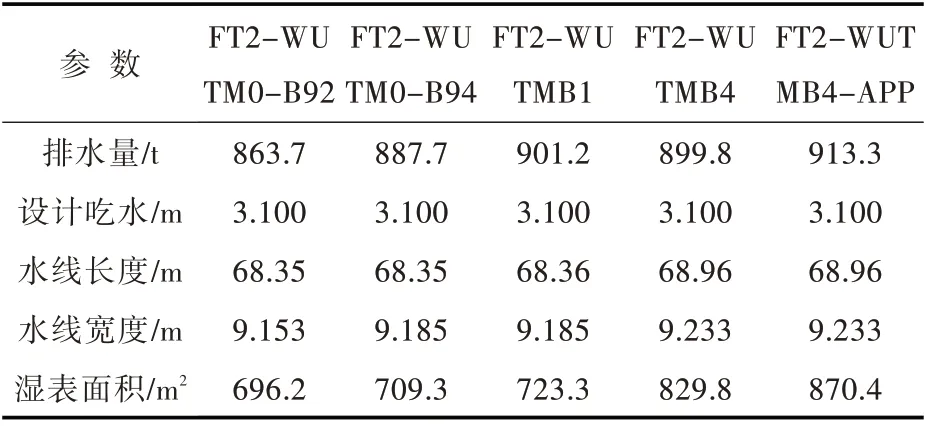
表2 船型方案主要元素Table 2 Main elements of ship scheme
2.2.3 计算域与边界条件
计算域采用长方体区域,其中入口边界距船体约1 倍船长,出口边界距船体约4 倍船长,水面以上、船体以下等其他方向则取约1 倍船长。远场边界采用速度入口与压力出口的边界条件组合。
2.2.4 空间离散网格
切割体网格(CutCell)是近10 年新发展起来的一种网格划分技术,由于其生成简单,兼具结构化网格的较高质量和非结构网格的复杂表面适应性,所以得到了广大CFD 学者的关注。本文采用CutCell 网格与近壁面的棱柱层网格相结合的方式进行计算域的离散,近壁处理采用壁面函数方法,网格布置于对数率层之内(30<y+<300)。FT2-WUTMB4 和FT2-WUTMB4-APP 船 型 方 案 的离散网格布置图分别如图10 和图11 所示。
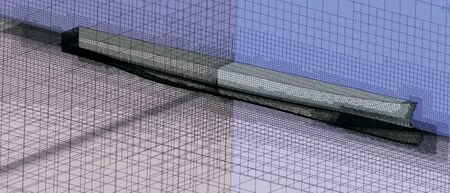
图10 FT2-WUTMB4 船型方案离散网格布置图Fig.10 Discrete gird layout of FT2-WUTMB4 scheme

图11 FT2-WUTMB4-APP 船型方案离散网格布置图Fig.11 Discrete gird layout of FT2-WUTMB4-APP scheme
2.2.5 方程离散与求解
本文对自由面的处理采用有限体积法(volume of fluid,VOF)来捕捉其形状,并且采用high-resolution interface capturing(HRIC)格式处理不混合组分的对流输运方程。
2.3 计算结果与分析
2.3.1 不同船型方案数值模拟阻力计算结果
完成船舶流场数值模拟后,进行了设计航速v=25 kn 时的总阻力和有效功率预报,模型尺度(缩尺比1∶20)光体船模与基于二因次方法换算所得的实船阻力如表3 所示。
各船型方案在设计航速v=25 kn 时的总阻力曲线和有效功率曲线分别如图12 和图13 所示。
在综合分析,充分考虑稳性、布置等工程需要的情况下,结合图12 和图13 可知,在设计航速v=25 kn 时FT2-WUTMB4 船型的总阻力和有效功率情况较优。因此,选定FT2-WUTMB4 船型为最终采用的线型,并对FT2-WUTMB4-APP 模型进行了阻力预报,发现其能够满足预定的功能需求。
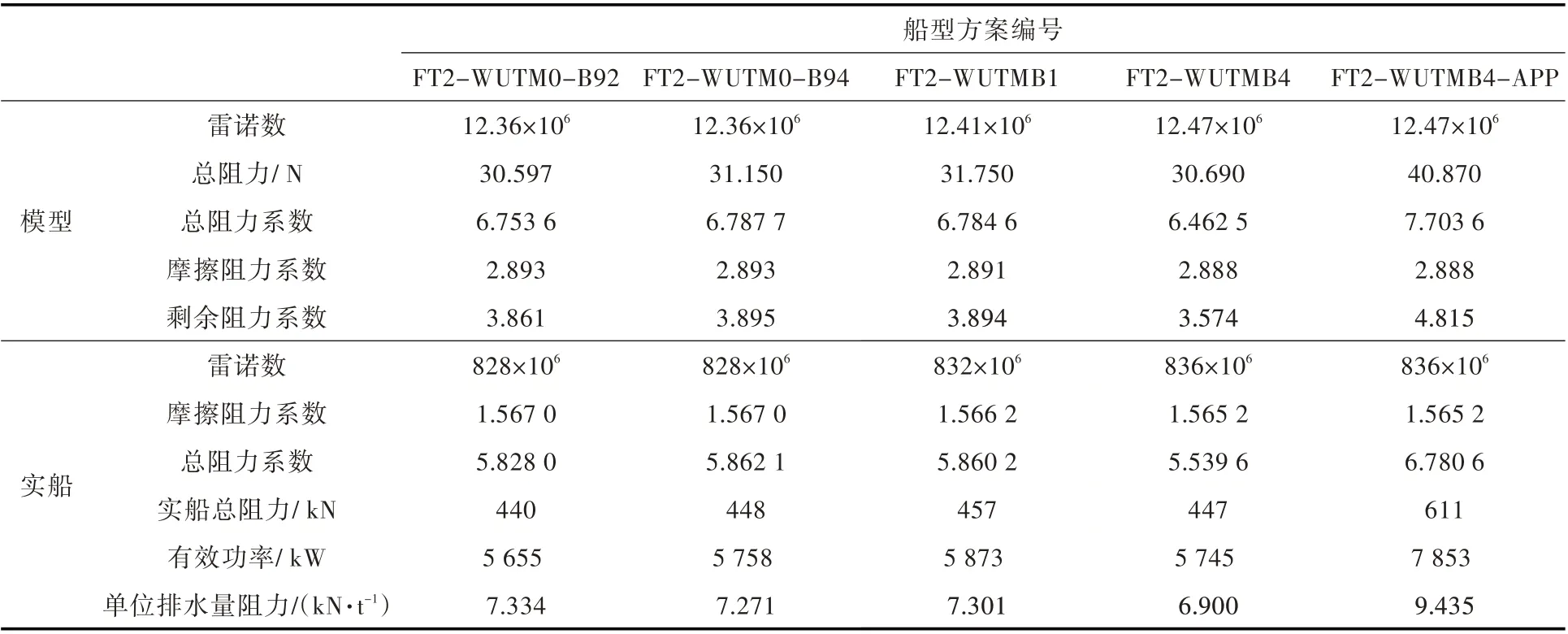
表3 各方案数值计算预报的阻力Table 3 Predicted resistance for each scheme by numerical calculation
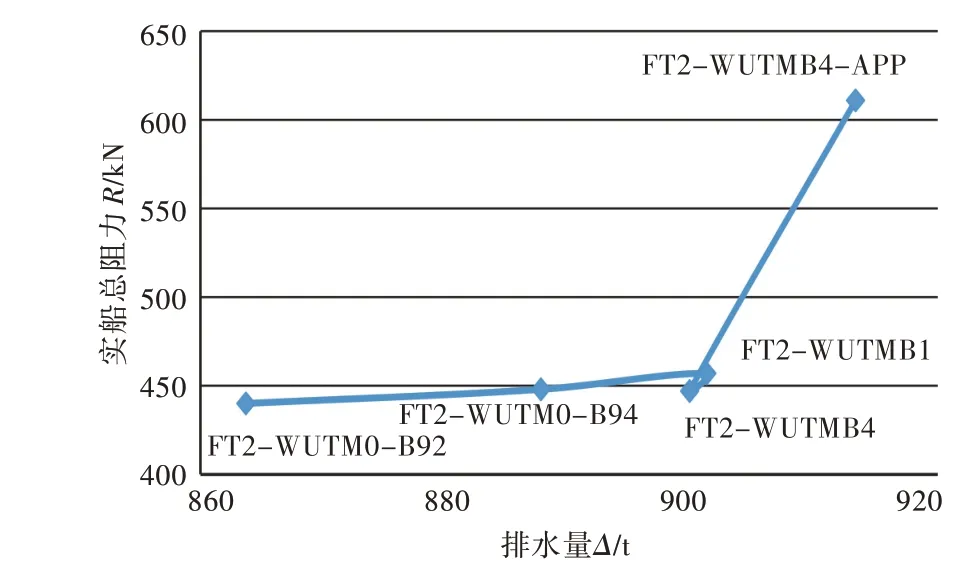
图12 不同船型方案的总阻力曲线Fig.12 The total resistance curve for different schemes
2.3.2 优选船型方案的流场情况

图13 不同船型方案的有效功率曲线Fig.13 Effective power curve for different schemes
FT2-WUTMB4-APP 船型方案的兴波波形和在实船航速为25 kn 时的船体压力系数分布分别如图14 和图15 所示。
其中,压力系数定义为

式中:p0为标准大气压;g 为重力加速度;z 为自由液面高度。

图14 FT2-WUTMB4-APPT 船型方案的兴波波形Fig.14 Wave making of FT2-WUTMB4-APP scheme
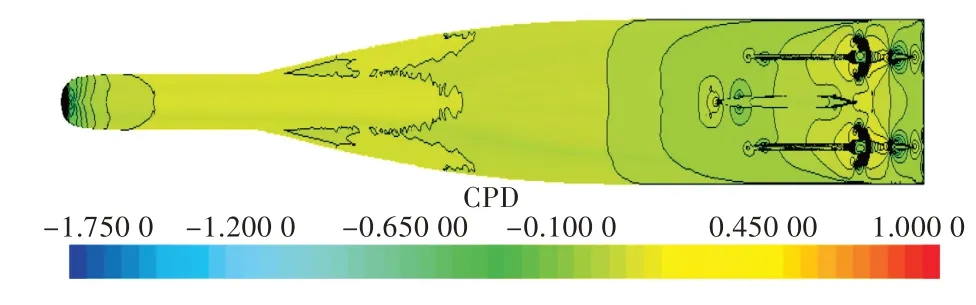
图15 FT2-WUTMB4-APP 船型方案的船体压力分布(全附体,基阵全部移除)Fig.15 Hull pressure distribution of FT2-WUTMB4-APP scheme(including all appendages except array)
由式(3)可知,图15 所示云图中的压力系数Cpd为去掉了重力与大气压强影响的水动压力(仅显示水线以下船体部分)。由图15 可知,特型附体(即圆柱形球鼻艏)与船体相接处的压力分布均匀过渡,即圆柱形球鼻艏与船体线型光顺过渡,此为加装特型附体后未引起较大的阻力增值的重要因素。
FT-WUTMB4-APP 船型方案在实船航速为25 kn 时的船体极限流线如图16 所示,附体安装方向以及外形与船体极限流线方向一致,不至于引起较大的附体阻力增值,而艏部波形流线与图17 模型试验中的艏部兴波较为相似,从模型试验中观察到此波水层较薄,区域较短,对船舶阻力影响较小。
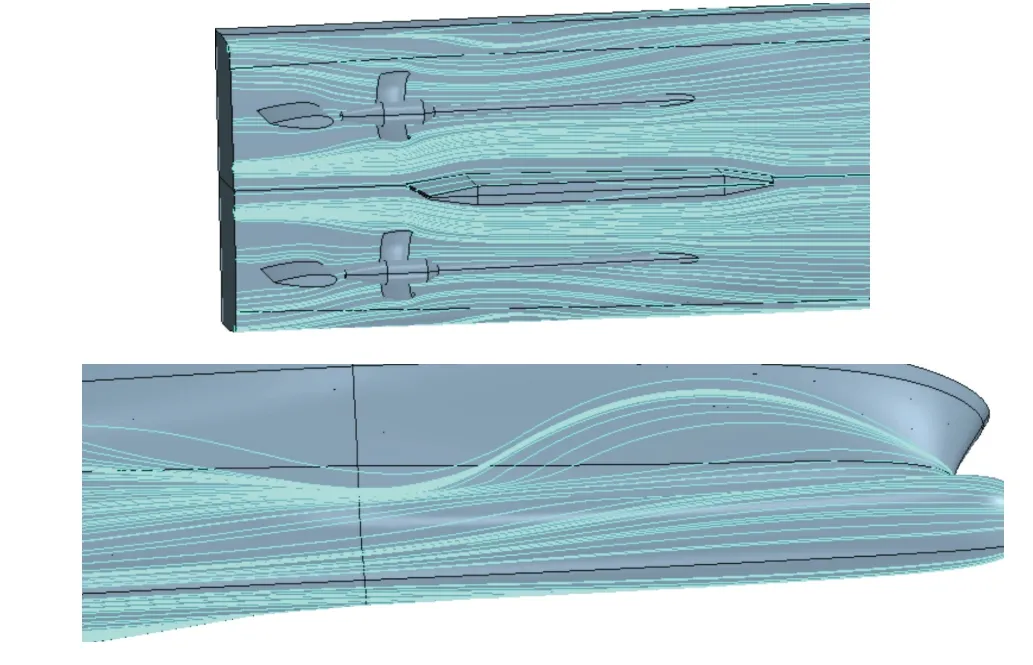
图16 FT2-WUTMB4-APP 船型方案的船体表面流线(全附体,基阵全部移除)Fig.16 Hull surface streamline of FT2-WUTMB4-APP scheme(including all appendages except array)
3 模型试验
针对数值模拟选出的FT2-WUTMB4 船型,在武汉理工大学进行了拖曳水池试验。图17 所示为实船航速25 kn 时的模型试验情况,图18 所示为模型试验数据换算到实船的阻力曲线。
由表3 可以看出,数值模拟的光体(FT2-WUTMB4)阻 力 为 447 kN,全 附 体(FT2-WUTMB4-APP)阻力为611 kN,模型试验的光体阻力为446.1 kN,全附体阻力为609.9 kN,之间的误差约为0.2%,且模型试验与数值模拟的艏部流线具有一定的相似性,艏部上浪水层较薄,对船舶阻力影响不大,因此艏部线型能够满足工程需要。

图17 v=25 kn 时的模型试验Fig.17 Model test at v=25 kn
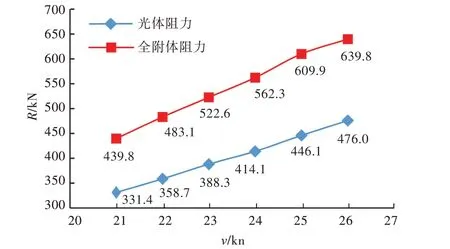
图18 模型试验换算到实船的阻力曲线Fig.18 Real ship resistance converted from model test
4 结 语
本文通过数值模拟优选出了满足布置的阻力最佳船型,并通过模型试验进行了验证。模型试验结果与数值模拟结果的误差约为0.2%,这表明,本文所采用的多方案优化方法是有效的。
在主尺度、布置需求等一定的条件下,减小湿表面积、降低排水量是减小阻力最有效的方法。通过数值模拟对船型及附体进行多方案对比分析和逐步趋近分析,并通过模型试验加以验证,可有效了解规律并控制附体阻力的增加。本文所采用的多方案优化方法是一种经济、高效、可靠的优选船型的方式。
