含橡胶连杆的曲柄滑块机构非线性动力学研究*
2020-06-28程寿国陈虎威吕清涛
程寿国,陈虎威,吕清涛
(1.上海大学 机电工程与自动化学院,上海 200072;2.江阴职业技术学院 机电工程系,江苏 江阴 214405;3.江苏航天动力机电有限公司,江苏 泰州 214523;4.清华大学 计算机科学技术系,北京 100084;5.上海天茗信息科技有限公司,上海 201499)
0 引 言
橡胶件在工程上广泛应用于弹性联轴节、连杆销套和隔震等领域。陆金铭等[1]利用扭转振动试验台和有限元数值模拟方法研究了高弹联轴器橡胶件的温度场分布变化过程和温度变化曲线;赵雷雷等[2]通过弹性力学理论计算分析、有限元软件仿真及试验等方法研究了悬架轴对称橡胶衬套径向变形,证明了3种方法的一致性;魏志刚等[3]通过材料力学试验为有限元仿真提供了橡胶衬套材料力学性能参数;梁瑞军等[4]研究了隔震曲线连续梁桥铅芯橡胶支座参数优化问题。
而现在对曲柄滑块机构的运动稳定性研究主要集中于铰间隙和连杆裂纹两个问题。王旭鹏等[5-6]主要对曲柄滑块机构含间隙时接触碰撞力进行了研究,但没有进一步讨论含间隙的系统运动是否是混沌的;史丽晨等[7]主要对往复式活塞隔膜泵动力端滑道磨损故障的动态特性进行了研究,并利用庞加莱截面图和最大李雅普诺夫指数等判别方法,讨论了系统的运动状态,其研究结果说明了当滑道磨损时,系统处于混沌状态;RAHMANIAN S和GHAZAVI M[8]推导了考虑滑块与连杆旋转关节间隙的运动微分方程,研究了带间隙曲柄滑块机构的非线性动力学行为;DUPAC M和BEALE D G[9]利用拉格朗日方程建模,研究了曲柄滑块机构中连杆中存在间隙和裂纹的非线性动力学问题。
由于以上分析并没有考虑连杆材料为橡胶材料的情况,笔者将利用SimDesigner软件对含橡胶连杆的曲柄滑块机构进行动力学仿真,并分析系统的运动稳定性,为将来含橡胶材料构件的动力学研究提供参考。
1 系统建模及连杆主要参数
常用机械系统动力学建模方法主要分为两类:
(1)以ADAMS等工程软件为主要工具的间接数学建模,用工程软件工具间接数学建模比较直观、操作起来容易,根据零件几何尺寸进行建模、装配、添加驱动,选择仿真工具进行计算,就可以计算出运动参数和约束力等;
(2)以拉格朗日方程为主要工具的直接数学建模[10],对实际结构进行一定的简化,利用几何关系进行求导,将实际问题抽象成方程或方程组,利用ODE等方法进行方程(组)的求解。
由于橡胶件受载荷后,有变形大等一系列特性,其刚度及强度不能用通常的材料力学方法来计算,而单独使用ADAMS也不能求解橡胶等大变形问题。
笔者利用SimDesigner软件,通过在CATIA建模环境中提供MSC-Nastran求解器的接口,能够进行多体动力学、结构分析、热分析和非线性有限元分析来解决问题[11-12]。
笔者在软件中定义柔性体后,仿真求解出*.mnf文件和*.xdb文件,激活橡胶连杆为柔性体,曲柄匀速转动,带动滑块直线运动,通过后处理求得机构的运动参数。其中,橡胶杆的主要参数如下:弹性模量为2×106 N/m2,泊松比为0.49,密度为910 kg/m3。
橡胶连杆的主要几何尺寸如图1所示。

图1 橡胶连杆的主要几何尺寸
图1中,连杆两个轴承孔圆心距离350 mm,两个轴承孔外径为32 mm。为了表述方便,将曲柄与连杆连接的轴承孔外径用D表示,连杆与滑块连接的轴承孔外径用d表示。橡胶杆厚度为20 mm。
2 系统的计算结果与分析
笔者分别对曲柄滑块机构进行全刚体分析、刚柔耦合分析(原始尺寸D=d=32mm),和轴承孔外径尺寸发生变化后的刚柔耦合分析,进而对比分析含橡胶材料连杆的曲柄滑块机构运动规律,以及曲柄转速对含橡胶连杆的曲柄滑块机构的影响、轴承孔外径尺寸对该系统的影响。
2.1 全刚体分析、刚柔耦合分析的数值结果对比
全刚性和刚柔耦合机构滑块的位移、速度和加速度对比图如图2所示。
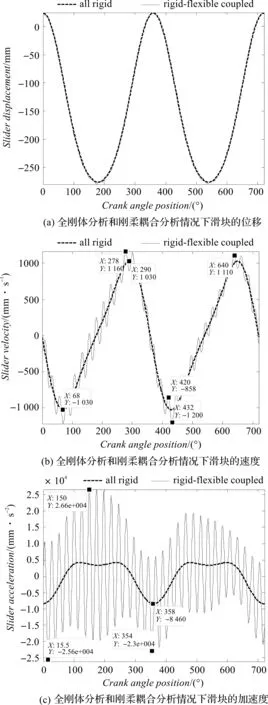
图2 全刚体分析和刚柔耦合分析滑块的加速度对比
图2中,横坐标是曲柄的角位置,纵坐标分别是滑块的位移、速度和加速度。对比以上分析结果可知,全刚体分析和刚柔耦合分析情况如下:
(1)滑块的位移均为“正弦”曲线,而且曲线趋势一致。这是因为虽然刚柔耦合带入非线性因素,但是对滑块的位移影响非常小;
(2)全刚体情况时,滑块的速度曲线是标准的正弦曲线;而刚柔耦合情况时,滑块的速度曲线发生剧烈波动,但整体呈现和刚体情况类似的正弦曲线。这是因为在刚柔耦合状态时,橡胶连杆的两个轴承孔中心的距离是变化的,从而引起滑块速度曲线的波动,此时速度的变化趋势与全刚体类似,所以滑块的速度曲线一致围绕着全刚体情况下滑块的速度曲线上下波动。
全刚体情况下,滑块速度最大值约为1 030 mm/s,滑块速度最小值约为-1 030 mm/s;刚柔耦合情况下,滑块速度最大值约为1 160 mm/s,滑块速度最小值约为-1 200 mm/s;
(3)全刚体情况时,滑块的加速度曲线作周期性变化;刚柔耦合情况时,滑块加速度呈现看似无规则振动状态,但大致变化趋势与全刚体状态接近。这是因为由于连杆材料的非线性,在对连杆施加外载时,连杆的两个轴承孔中心距离不断变化造成的。
全刚体情况下,滑块加速度最小值约为-8 460 m/s2;刚柔耦合情况下,相应时刻滑块加速度约为-23 000 mm/s2,滑块最大加速度约为26 600 mm/s2,滑块最小加速度约为-25 600 mm/s2,且变化频繁。
2.2 曲柄转速对含橡胶连杆曲柄滑块机构的影响
曲柄在60 r/min、90 r/min和120 r/min转速下,滑块的位移、速度和加速度,即滑块的动力学响应如图3所示。
从图3(a)可以看出:滑块的位移对曲柄转速变化影响不明显,在波峰和波谷有很小的变化;
从图3(b,c)可以看出:在波峰和波谷处速度、加速度的变化最大,而图3(a)中波峰、波谷位置正是滑块运动极限位置。当曲柄转速为120 r/min时,滑块的速度最大值约为2 720 mm/s,滑块的速度最小值约为-2 850 mm/s;曲柄转速为90 r/min时,滑块的速度最大值约为1 880 mm/s,滑块的速度最小值约为-1 920 mm/s;曲柄转速为60 r/min时,滑块的速度最大值约为1 110 mm/s,滑块的速度最小值约为-1 220 mm/s;
从图3(b)中可以看出:当曲柄转速越小,滑块的速度波动越小;
从图3(c)可以看出:曲柄转速对滑块的影响更加明显,已经看不出“正弦曲线的波峰和波谷”。
2.3 曲柄与连杆连接的轴承孔外径对系统的影响
在曲柄与连杆连接的轴承孔外径尺寸变化时,含有橡胶连杆的曲柄滑块机构滑块的位移、速度和加速度的响应如图4所示。

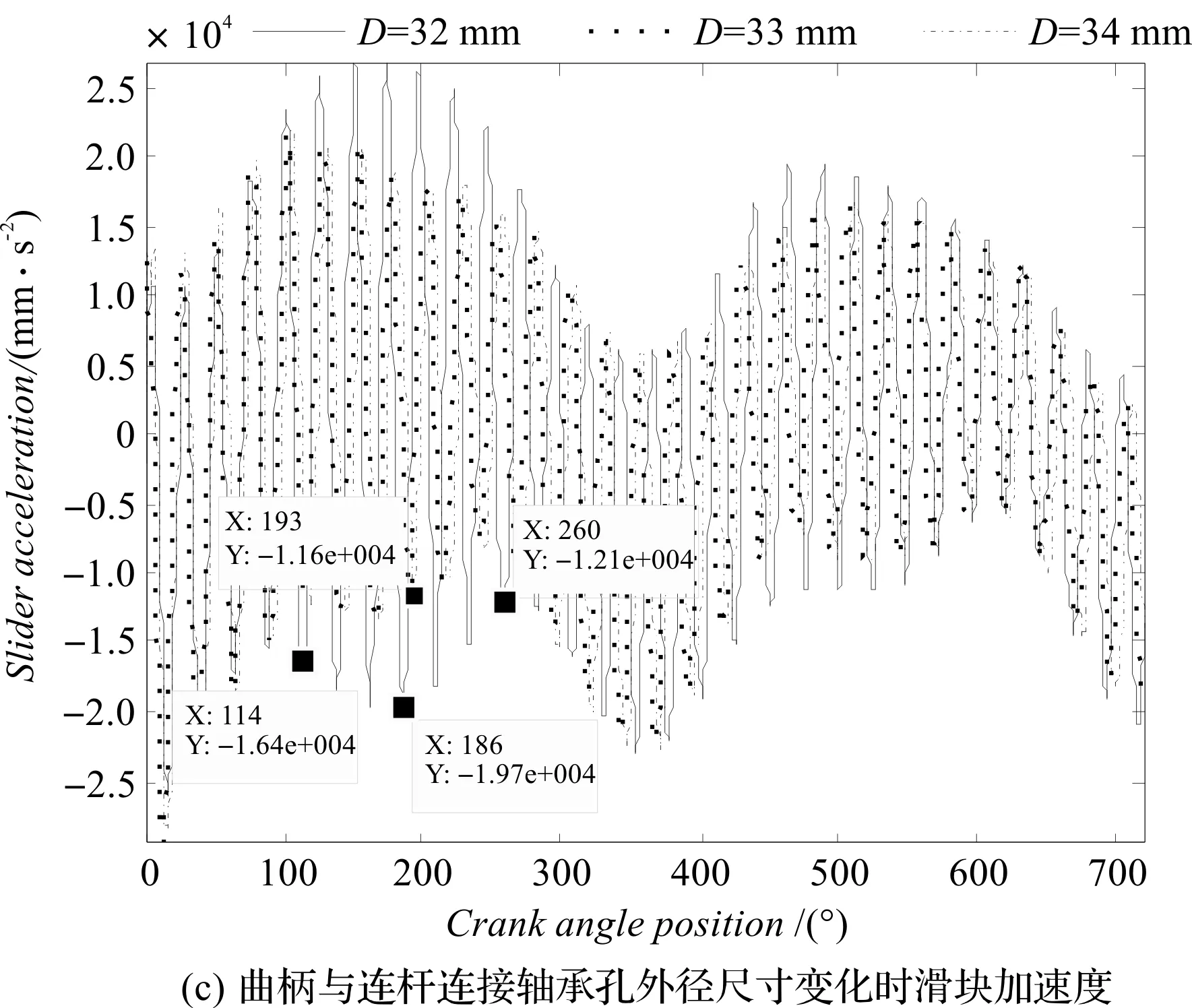
图4 曲柄与连杆连接轴承孔外径变化时滑块运动响应
图4中,曲柄的转速为60 r/min。当轴承孔外径尺寸(连杆的两个轴承中心距不变)发生变化时,从图4(a)可以看出,滑块的位移变化很小;从图4(b)可以看出,滑块的速度有了一些变化;从图4(c)可以看出,轴承孔外径为32 mm时,滑块的加速度在114°~260°区间内波动比另外两种情况波动大很多。
3 系统运动状态判别
机械系统的运动通常包括周期运动、准周期运动、混沌和随机运动几类。判别系统运动是否是混沌的方法主要有:相图观测法、庞加莱截面法、分岔图、分频采样法、重构相空间法等定性判别方法;以及Lyapunov指数法和功率谱分析法等定量判别方法。通常情况下,将几种方法结合起来可以获得更加准确的结果[13]。
笔者通过结合相图观测法、计算最大Lyapunov指数法和功率谱分析法,来讨论系统运动是否是混沌的。
3.1 相图观测法分析
相图观测法分析是根据动力学系统的数值运算结果,画出状态变量随时间的历程图,即相空间中相轨迹随时间的变化图。当相轨迹曲线是封闭图形时,系统的运动为周期运动,因为混沌不具有周期性,相轨迹曲线是不封闭的图形时,系统的运动可能是混沌运动;而混沌运动的往复性表现为相轨迹曲线集中在有界范围内,且不会发散到无穷远。
(1)全刚体机构与刚柔耦合机构的相图。
全刚体曲柄滑块机构与刚柔耦合机构的滑块的相图曲线如图5所示。

图5 全刚体与刚柔耦合机构的滑块相图对比分析图
图5中,实线为全刚体曲柄滑块机构的相图曲线,是封闭曲线,可以说明其运动为周期运动;通过图5(c)中的虚线可以比较容易观察出含橡胶连杆的刚柔耦合机构可能是混沌的,所以后面主要观察滑块速度-加速度相图。
(2)曲柄转速不同时的相图。
曲柄不同转速时滑块的相图如图6所示。
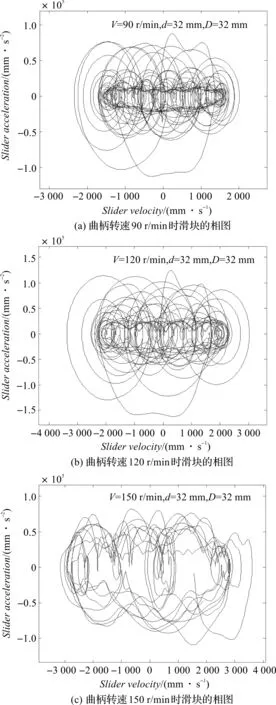
图6 曲柄不同转速时滑块的相图
从图6中可以看出:曲柄转速不同时,滑块的速度-加速度相图变化明显;滑块速度与加速度相图曲线随着曲柄转速不断增加变得越来越稀疏;曲柄的转速不同,曲柄对橡胶连杆的力不同,橡胶连杆的变形不同,且橡胶是非线性材料,橡胶连杆作用在滑块上的力也不相同,造成不同曲柄转速驱动下滑块的相图有很大的区别。
(3)曲柄与连杆间轴承外径尺寸变化时的相图。
曲柄与连杆间轴承外径尺寸变化时的相图如图7所示。

图7 曲柄与连杆间轴承外径尺寸变化时的相图
从图7中可以看出:系统处于非周期状态,相图是不封闭且有界的;随着曲柄与连杆间轴承外径尺寸变化,相图发生一定的变化。这一点与混沌系统对系统参数微小变化的敏感性是一致的。
系统是否处于混沌状态还需要作进一步的判别。
3.2 最大李亚普诺夫指数
当最大Lyapunov指数为正值时,系统就是混沌的。虽然庞加莱截面法映射图或相平面轨迹都可作为周期与混沌的直观判断方法,但求解Lyapunov指数比别的方法更为可靠。
计算最大Lyapunov指数的方法很多,在这里笔者采用WOLF法进行计算。WOLF法是计算最大Lyapunov指数常用的方法之一[14]。
在不同转速下,曲柄的最大Lyapunov指数演变图、曲柄,以及连杆连接轴承外径尺寸不同时的最大Lyapunov指数如图8所示。

图8 考虑连杆柔性时的最大Lyapunov指数
从图8(a)中可以看出:当D=32 mm、d=32 mm时,曲柄分别在V=60 r/min、V=90 r/min、V=120 r/min和V=150 r/min转速下,通过WOLF法计算得到的最大Lyapunov指数值分别为0.005 5、0.005 8、0.017 3和0.026 7。由此可以发现,随着曲柄转速的增加,最大Lyapunov指数值也随之增加;
从图8(b)中可以看出:曲柄与连杆连接轴承外径尺寸分别为D=30 mm、D=32 mm、D=33 mm和D=34 mm时的最大Lyapunov指数演变图,通过WOLF法计算得到的最大Lyapunov指数相应值分别为0.010 2、0.005 5、0.011 2和0.017;在D=32 mm时,最大Lyapunov指数值最小。
以上计算的最大Lyapunov指数值均为正值,由此可以判断,在以上参数时系统是混沌的。
3.3 功率谱分析
因为混沌振动具有随机性,可以采用随机振动的频谱分析方法来识别混沌振动。周期运动和准周期运动的功率谱为离散谱,而混沌运动的功率谱为连续谱。
含橡胶连杆的曲柄滑块系统的功率谱如图9所示。

图9 考虑连杆柔性时的功率谱
从图9中可以看出:系统的功率谱是连续的;从功率谱分析判断可知系统是混沌的。
4 结束语
利用SimDesigner软件可以进行大变形、大应变计算的特点,笔者对含橡胶连杆的曲柄滑块机构进行了刚柔耦合动力学仿真,并利用相图观测分析法、最大Lyapunov指数法和功率谱分析法,分别对系统运动是否混沌进行了讨论。具体如下:
(1)通过全刚体模型与刚柔耦合对比分析后,证实SimDesigner软件可以对橡胶材料进行仿真计算,通过相图观察含橡胶连杆的曲柄滑块机构运动可能具有混沌吸引子,而在不同转速和曲柄与连杆连接轴承外径尺寸不同时,最大Lyapunov指数均为正,可以说明系统是混沌的;
(2)通过图(2~4)可以看出,考虑橡胶连杆为柔性体时滑块的加速度变化非常明显,滑块的位移变化很小。通过滑块的速度、加速度相图更容易观察出系统可能是混沌的;
(3)从图3(b,c)和图6可以看出,考虑橡胶连杆为柔性体时,滑块运动对曲柄转速的变化比较敏感;
(4)通过图(4,7)可以看出,当曲柄与连杆连接轴承外径尺寸不同时系统发生了变化,进一步说明了系统是混沌的,系统的运动对系统参数的微小变化响应敏感。
